
基于自抗扰方法的UUV近水面垂直面运动控制
2011-05-27 09:56施小成严浙平
水下无人系统学报 2011年3期
施小成, 陈 江, 严浙平
基于自抗扰方法的UUV近水面垂直面运动控制
施小成, 陈 江, 严浙平
(哈尔滨工程大学 自动化学院, 黑龙江 哈尔滨, 150001)
无人水下航行器(UUV)在近水面航行时, 受到海浪、噪声等干扰的影响较大, 尤其是垂直面方向, 为满足UUV在近水面潜伏作战的需求, 研究了基于自抗扰控制方法(ADRC)的运动控制技术。该技术抗干扰能力强, 能将来自系统内部和外部的扰动都归结为系统的总扰动, 并对其进行实时估计同时给予相应的扰动补偿, 运用此方法设计了UUV垂直面控制器并分析了其抗扰性能, 以解决海洋环境下UUV近水面垂直面运动的控制扰动问题。仿真结果表明, 所设计的UUV垂直面自抗扰控制器能有效抑制海浪的干扰, 降低艉升降舵的抖振现象, 具有较好的控制效果和抗扰性能。
无人水下航行器; 垂直面运动; 自抗扰控制器; 艉升降舵; 抖振现象
0 引言
无人水下航行器(unmanned underwater vehicle,UUV)在近水面航行时常会受到海浪、海流等的扰动, 造成UUV操舵频繁且舵幅较高, 经典比例-积分-微分(proportional integral derivative,PID)控制器虽然是UUV控制的常用方法之一, 但是随着UUV的发展和对控制精度和速度的要求以及对环境变化的适应能力的要求越来越高, PID控制慢慢显露出其局限性。中国科学院系统科学研究所韩京清研究员将现代理论对控制系统的认识和现代的信号处理技术相结合, 汲取经典PID的思想精华, 提出了一种新型的实用控制技术——自抗扰控制技术(active disturbance rejection controller,ADRC)[1]。自抗扰控制器是对经典PID控制器结构方面的缺陷做进一步改进, 它利用特殊的非线性效应, 结合实际的非线性工程算法, 是一种自动补偿对象模型的新型控制器。这种估计扰动并给予相应补偿的能力, 对于解决UUV在运动控制中遇到的各种扰动问题具有一定的适应性[2]。
自抗扰控制器主要由跟踪微分器(tracking differentiator, TD)、扩张状态观测器(extended state observer, ESO)、非线性误差反馈(nonlinear error feedback, NEF) 3部分组成。对于跟踪微分器[3], 它能以任意精度跟踪给定信号, 合理提取连续信号, 并给出其微分信号, 从而抑制UUV在信号传输时的噪声干扰。对于扩张状态观测器[4], 它能起到实时跟踪并估计扰动的作用, 它的存在提高了控制器的抗干扰性和鲁棒性。对于状态误差的反馈形式则通过线性或非线性函数把相应误差量进行组合[5], 产生一个控制量传递给被控对象, 提高了控制器的适应性。本文通过对自抗扰方法的研究及对自抗扰控制器抗扰性的分析计算, 设计了适用于UUV在近水面航行时控制效果和抗扰性能较高的垂直面控制器, 以满足控制指标及工程需求。
1 UUV海试中垂直面控制性能
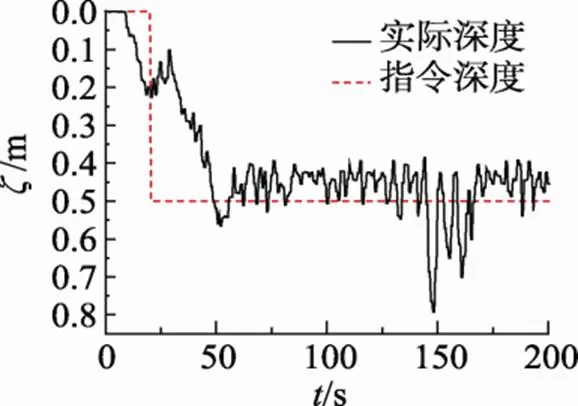
图1 近水面定深航行曲线
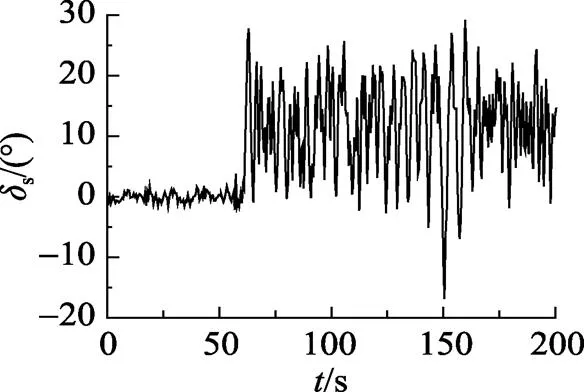
图2 PID控制的艉升降舵舵角变化曲线
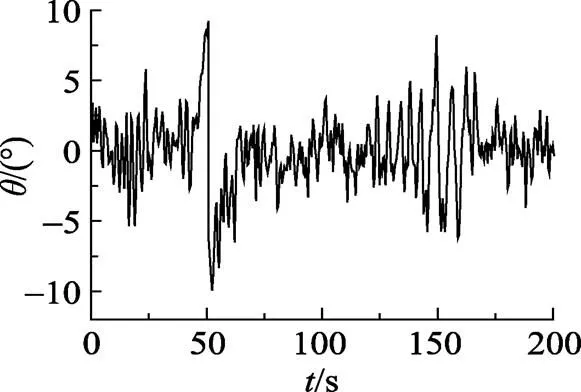
图3 纵倾角随动变化曲线
UUV在近水面受到的波浪力其均值不为零, 除了振荡性质的力外还有定常力的成分, 对UUV垂直面运动影响最大的是水表面的垂向力和力矩, 即吸波力也称2阶波浪力, 它随航行深度的减小而增大, 因此给UUV下潜时的深度保持造成困难, 使UUV有向水面抛甩的趋势。从图1看, UUV下潜到0.2 m时出现上浮现象, 到达指令深度后深度仍在振荡, 估计是受到2阶波浪力的影响。UUV在波浪力作用下作近水面运动时, 由于波动压力作用于艇体, 又由于次波面为等压力面且倾斜于艇体, 使得艇体所受的压力不对称, 从而产生幅值较大的波浪绕动力和力矩, 即通常所说的1阶波浪力, 它是一种高频周期力, 以波形相同的频率作振荡, 因其频率太高, 升降舵无法产生有效的控制作用去克服, 只能通过升降舵保持UUV的平均深度。故从图2看, 升降舵的频繁操舵估计是受其影响。深度在指令深度附近周期振荡, 也就造成纵倾角的不断振荡, 从图3看, 还有一些高频分量, 估计是由一些短峰波海浪等紊流干扰造成。另外, 从控制器方面考虑, 通过PID的控制作用, 控制器输出的升降舵指令信号对纵倾误差具有一定信号放大作用, 在海情较差时, PID控制器的控制效果存在一定局限性。
综上所述, 从海试数据可以看出, UUV在近水面航行时, 所受海浪干扰影响较大, PID控制器的控制效果一般, 有寻求抗干扰能力更强的控制器的必要[6]。
2 基于ADRC的控制方法
2.1 UUV垂直面运动模型
本文研究对象UUV为扁平流线型, 其结构如图4所示。艇体艉部安装有一副艉升降舵, 一对艉方向舵和一左一右2个主推进器。
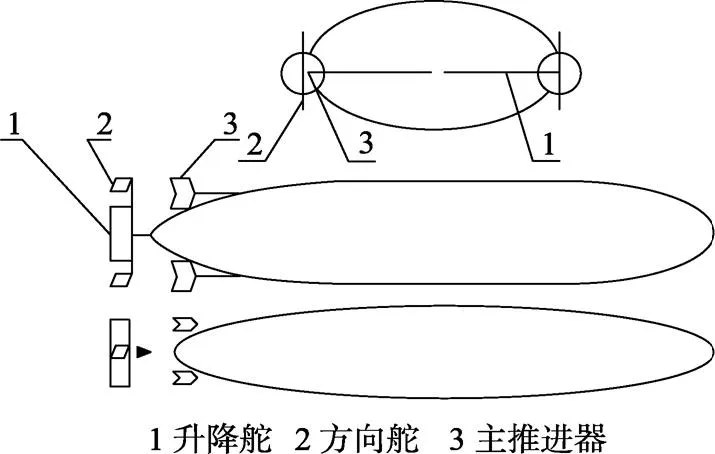
图4 UUV结构示意图

纵倾方程
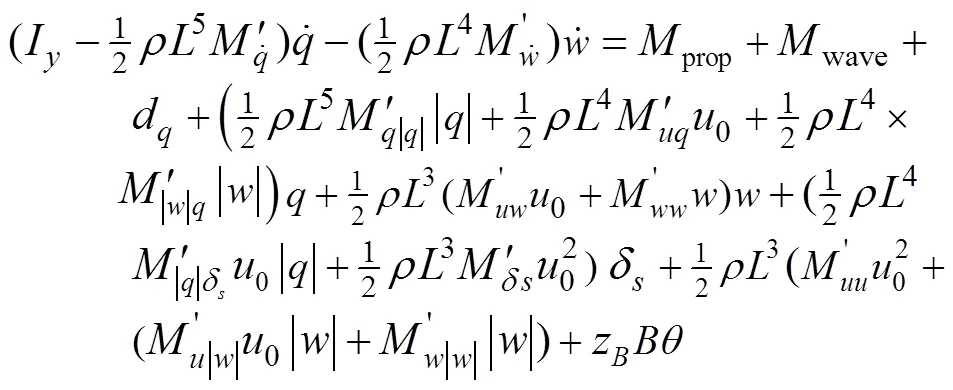
垂向方程
随机海浪设为定点长峰波海浪, 见式(5), 谱密度采用国际可用拖曳水池会议(international towing tank conference, ITTC)推荐的单参数波谱来描绘, 即P-M谱, 见式(6)。
2.2 UUV垂直面自抗扰控制器
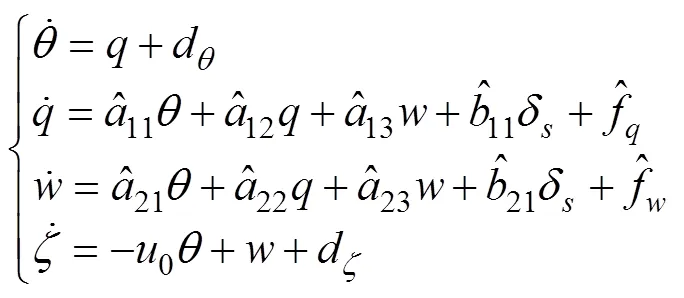
按照分离性原理思想, 将自抗扰控制器分成TD、ESO、NEF 这3个独立的组成部分来进行设计, 然后再组合起来成为一个完整的自抗扰控制器。将式(1)~ (4)改写为方程组
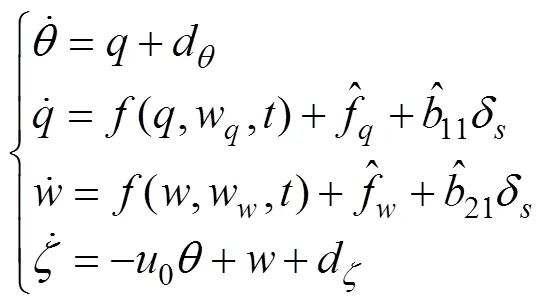
将式(7)写为
根据自抗扰控制理论, 采用2阶自抗扰控制器进行设计, 2阶自抗扰控制器的具体算法为
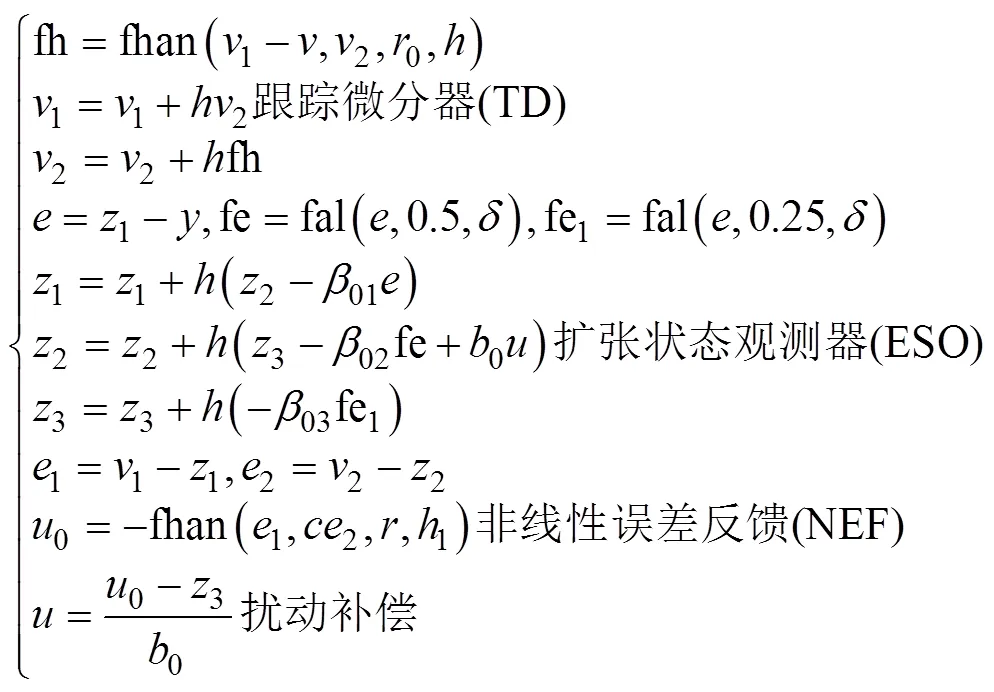

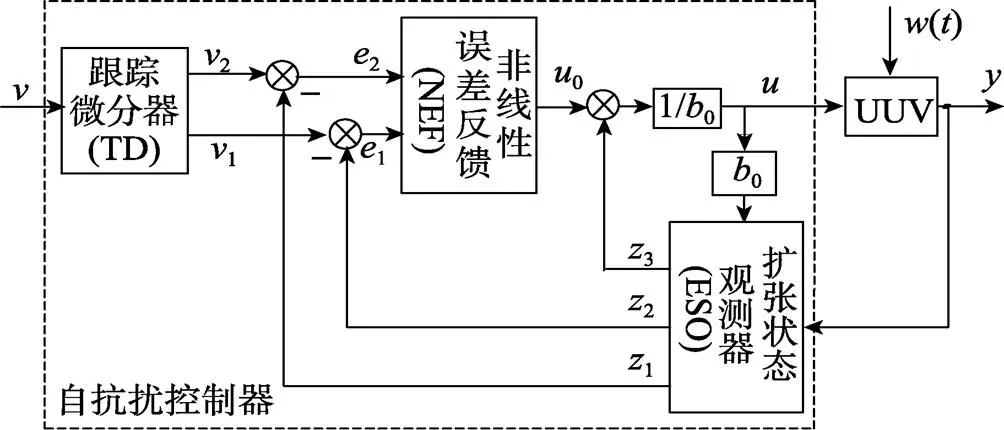
图5 自抗扰控制器结构图
3 仿真试验及验证
UUV在自抗扰控制器控制下完成近水面(0.5 m水深)海浪干扰环境下的定深航行试验。为评价所设计控制器的性能, 以PID控制器的仿真数据加以比对。ADRC控制与PID控制动态性能指标比较见表1。仿真结果如图6~图9。
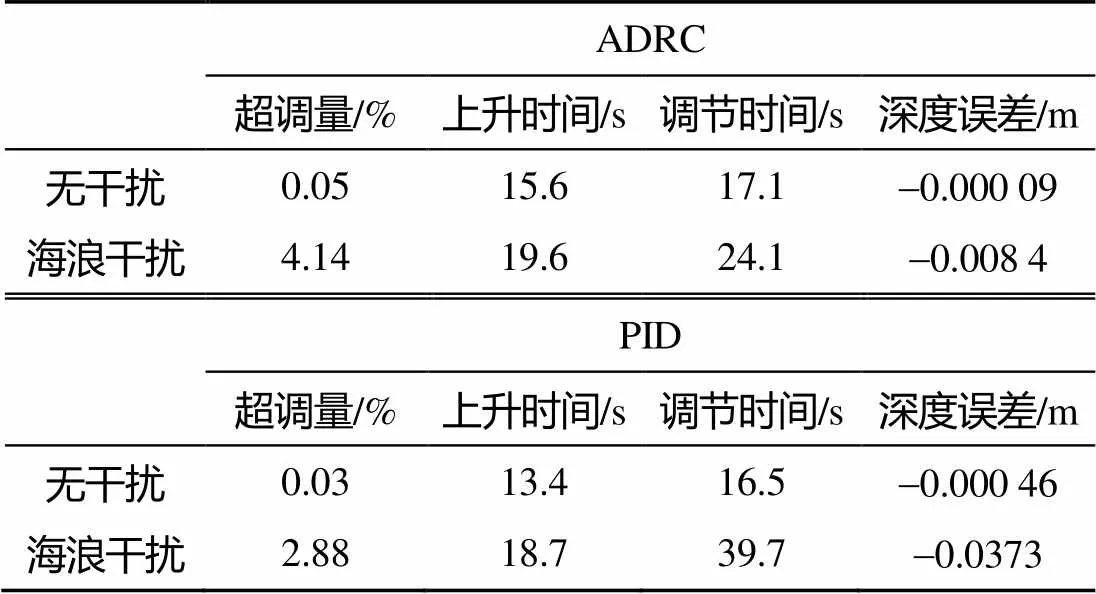
表1 ADRC控制与PID控制动态性能指标比较
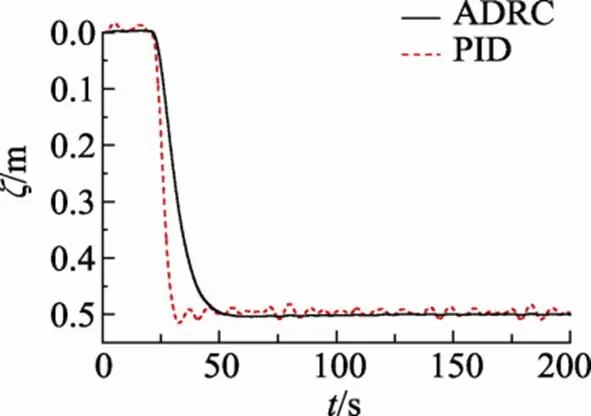
图6 海浪干扰下近水面航行曲线
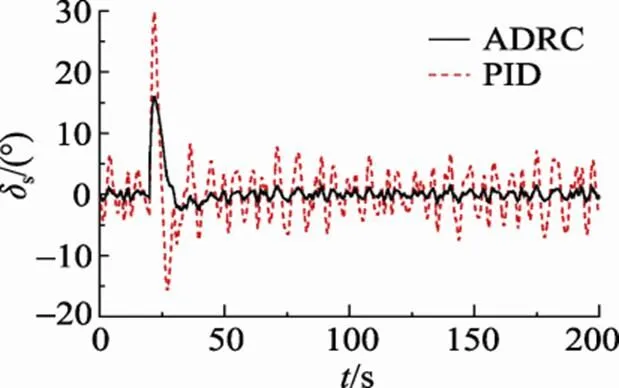
图7 ADRC控制与PID控制的艉升降舵舵角变化曲线
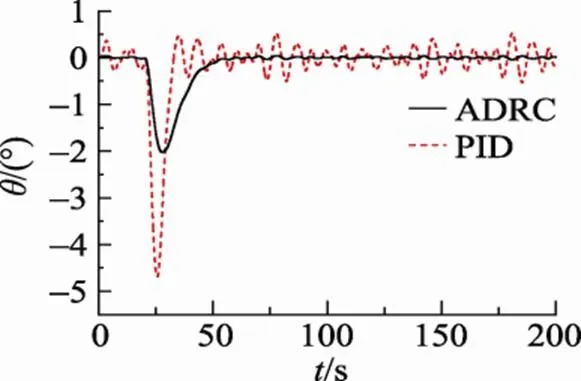
图8 ADRC控制与PID控制的纵倾角随动变化曲线
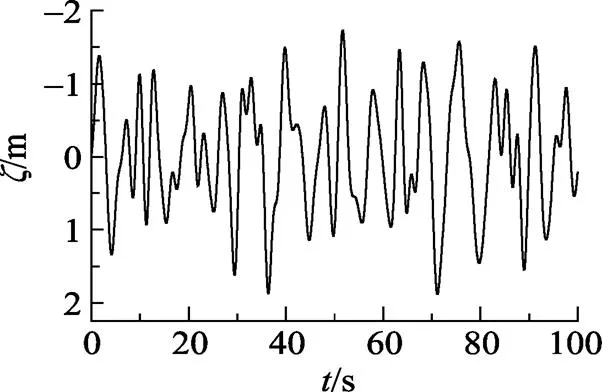
图9 定点长峰波随机海浪
从仿真曲线可以看出, 在近水面海浪干扰的影响下, ADRC控制器和PID控制器均采用原参数情况时, 在200 s的仿真时间内, ADRC控制和PID控制均能实现指令的深度变化, PID控制的上升时间虽略小于自抗扰控制, 但其调节时间较长, 到达指令深度后仍有小幅振荡, 从艉升降舵的控制品质看, 无论是舵频还是舵的幅度, 自抗扰控制方式均小的多, UUV的纵倾角变化也更平稳。与海试曲线图1~图3相比, 由于自抗扰控制器自身具有对扰动估计补偿的能力, 其抗干扰性明显强于PID控制器, 控制效果略胜一筹。
4 结束语
本文分析了UUV在海试中近水面航行时垂直面控制性能上存在的部分问题, 通过对其研究, 引入自抗扰方法, 分析了自抗扰控制器的抗扰性能, 总结了其参数对自抗扰控制器抗扰性的影响及整定规律, 设计了UUV垂直面自抗扰控制器以解决UUV近水面运动过程中外界扰动的影响。在海浪干扰下进行半实物仿真试验, 证明了该方法的有效性, 与PID控制器相比具有较好的控制品质及抗干扰性能。此控制技术能有效抑制海浪的干扰, 降低艉升降舵的抖振现象, 可提高UUV在近水面航行时的控制性能。本文的研究成果对于将自抗扰方法应用于实际工程中, 满足作战需求, 如潜艇近水面潜伏作战等, 改善UUV垂直面运动控制效果, 具有重要的参考价值。
[1] 韩京清. 从PID技术到自抗扰控制技术[J]. 控制工程, 2002, 9(3): 13-18, 15-16. Han Jing-qing. From PID Technique to Active Disturbances Rejection Control Technique[J]. Control Engineering of China, 2002,9(3): 15-16.
[2] 韩京清. 自抗扰控制器及其应用[J]. 控制与决策,1998, 13(1): 19-23. Han Jing-qing. Auto-diturbances-rejection Controller and it′s Applications[J]. Control and Decision, 1998, 13 (1): 19-23.
[3] 黄焕袍, 万晖, 韩京清. 安排过渡过程是提高闭环控制系统“鲁棒性、适应性和稳定性”的一种有效方法[J]. 控制理论与应用, 2001, 18(z): 89-94. Huang Huan-pao, Wan Hui, Han Jing-qing. Arranging the Transient Process Is an Effective Method Improved the Robustness, Adaptability and Stability of Closed- Loop System[J]. Control Theory & Applications, 2001, 18(z), 89-94.
[4] 韩京清, 一类不确定系统的扩张状态观测器[J]. 控制与决策, 1995, 10(1): 85-88. Han Jing-qing. The“Extended State observer”of a Class of Uncertain Systems[J]. Control and Decision, 1995, 10(1): 85-88.
[5] 韩京清. 非线性状态误差反馈控制律——NLSEF[J]. 控制与决策, 1995, 10(3): 221-225. Han Jing-qing. Nonlinear State Error Feedback Control Law——NLSEF[J]. Control and Decision, 1995, 10(3): 221-225.
[6] 王鹢, 王文武, 孙枫, 等. 干扰力作用下潜艇近水面运动的仿真[J]. 系统仿真学报, 2003, 15(1): 84-87. Wang Yi; Wang Wen-wu; Sun Feng; et al. Simulation of Submarine Near-surface Motion under Disturbance For- ce[J]. Journal of System Simulation, 2003, 15(1): 84-87.
[7] 韩京清. 自抗扰控制技术[M].国防工业出版社, 2008: 1-45, 243-295.
VerticalPlane Motion Control of UUV Near Free-surface Based on Active Disturbance Rejection Controller
SHI Xiao-cheng, CHEN Jiang, YAN Zhe-ping
(College of Automation, Harbin Engineering University, Hrbin 150001, China)
Unmanned underwater vehicle (UUV) is influenced by waves and noise, especially in the vertical direction, when it navigates near free-surface. In order to meet latency operation demand of UUV near the free-surface, we discuss a motion control technology based on active disturbance rejection controller (ADRC). This technology has stronger anti-interference capability, can combine the internal and external disturbances into the general disturbance of the system, and gives real-time estimates for the corresponding disturbance compensation. To solve the control disturbance problems of vertical plane motion for UUV near free-surface in ocean environment, we design a vertical plane motion controller of UUV by using this technology, and analyze its anti-disturbance performance. Simulation results show that the designed controller can effectively restrain the interference of waves and reduce the buffeting phenomenon of stern elevator, and has good control effect and anti-disturbance performance.
unmanned underwater vehicle(UUV); vertical plane motion; active disturbance rejection controller (ADRC); stern elevator;buffeting phenomenon
TJ 630.33; TP273
A
1673-1948(2011)03-0209-05
2011-03-07;
2011-05-03.
施小成(1957-), 男, 博士生导师, 教授, 主要从事船舶与潜器的控制方面的研究工作.
(责任编辑: 杨力军)
猜你喜欢
幼儿园(2021年13期)2021-12-02
小读者(2021年2期)2021-11-23
西安航空学院学报(2021年3期)2021-10-14
北京航空航天大学学报(2021年7期)2021-08-13
空间科学学报(2020年6期)2020-07-21
书香两岸(2020年3期)2020-06-29
中国惯性技术学报(2019年3期)2019-10-15
中国惯性技术学报(2019年6期)2019-03-04
智富时代(2018年11期)2018-01-15
智富时代(2018年11期)2018-01-15
