
六相永磁同步电机串联系统控制的两种方法分析研究
2011-05-21 00:42孙美美张树团
电子设计工程 2011年13期
鲁 芳,孙美美,张树团
(海军航空工程学院 山东 烟台 264001)
由于多相电机较普通三相电机有很多优点[1],在过去30年中,多相电机驱动的研究兴趣最近一直是稳步上升,而技术性能优良的多电飞机或全电飞机以及综合电力系统舰船,需要解决同一直流母线电源下的多台多相电机驱动系统中各电机能同时独立运行的问题。所以采用一台逆变器同时驱动不同电压额定值或不同转速或负载条件下的多台多相电机串联系统应运而生。本文以两台双Y移30°永磁同步电机串联系统为例,采用电流滞环控制和PWM载波控制两种控制策略,并在Matlab/Simulink环境下对系统进行建模仿真,验证分析系统的可行性,比较两种控制的不同。
1 两台双Y移30°PMSM串联系统
多相电机是一个多变量强耦合的非线性系统,根据机电能量建立的多相电机原始微分方程非常复杂,分析起来十分困难,选择适当的空间变换,能使方程简化。从矩阵分析的角度,六相电机的电感矩阵是一个循环矩阵,可以通过矩阵变换实现电感矩阵的对角化,消除相绕组之间的强耦合。
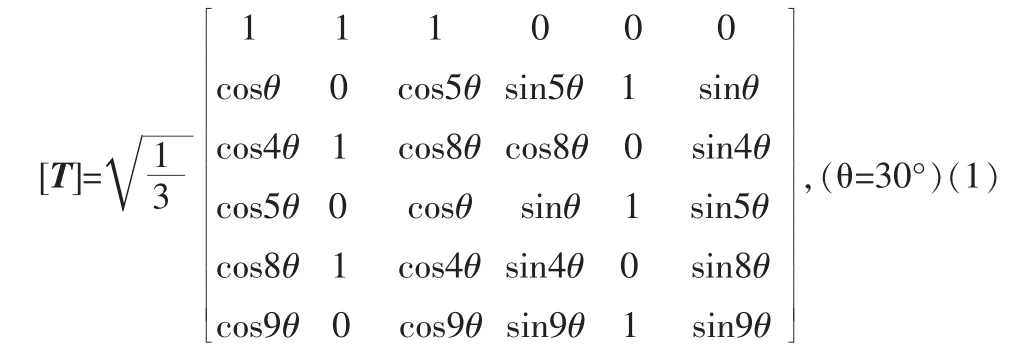
在对双Y移30°六相电机的解耦研究中,通常引入广义两轴正交变换T将六相电压和电流空间矢量投影到3个相互正交的两维子平面α-β、x-y和o1-o2中去。其中,自然坐标系下的电压和电流的基波和6k±1(k为偶数)次谐波投影到 α-β平面,6k±1(k为奇数)次谐波投影到 x-y平面,零次和3k次谐波投影到o1-o2平面。双Y移30°的电机的两相实变换矩阵[T]为[2]:
经过广义两轴正交变换后的定子电压方程中含有转子的旋转角 θr,需要使用旋转变换[R]消去 θr,得到静止坐标系下的模型。旋转变换矩阵[R]形式为:

根据多相电路坐标变化的一般理论,由逆变器输出的六相电流经过空间变换矩阵变换后,投影到3个正交的子空间中(α-β平面、x-y平面和 o1-o2平面),在 α-β平面和 x-y平面的电流分量可以产生独立控制的磁动势。根据双Y移30°电机的解耦方式,两台双Y移30°电机串联系统与逆变器连接如图1所示。
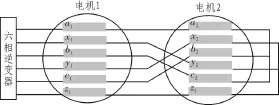
图1 两台双Y移30°PMSM串联Fig.1 Two dual-Y shifted by 30°PMSM in series
2 电流滞环控制
串联驱动系统由一台逆变器来供电,要求逆变器的输出电流可以任意控制,因此一般采用电流可控电压源逆变器,此时的电流控制环节位于自然坐标系中,控制的是实际的六相电流[iA,iB,iC,iD,iE,iF]T,对电流的控制模式多采用滞环比较控制。
对逆变器A相电流的滞环控制如图2所示,滞环比较器的滞环宽度为2h=2ΔiAmax,其中ΔiAmax是设定的最大电流偏差。A相电流参考值与实际值iA比较产生了电流偏差ΔiA(ΔiA=-iA)。当实际相电流iA超过给定电流,且偏差达到ΔiAmax时,滞环比较器的输出使A相上桥臂关断,经保持电路必要的保护延迟后,下桥臂导通,结果把A相绕组首端由高电位切换至低电位,因而电流开始下降。当实际相电流iA降低到比给定电流低ΔiAmax时,滞环比较的输出使A相下桥臂关断,上桥臂导通,电流再上升。由此上、下两个电子开关反复通断,迫使实际电流在滞环宽度2h内呈锯齿状不断跟踪给定电流的波形,于是通过调节滞环宽度可以有效地控制A相电流的偏差。滞环宽度直接影响电流的跟踪性能:宽度过宽时,开关频率低,跟踪误差大;宽度过窄时,跟踪误差小,但是开关频率过高,开关损耗增大。
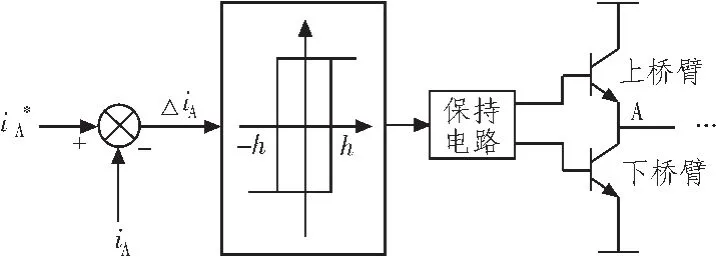
图2 逆变器相电流滞环控制Fig.2 Hysteresis current control of inverter
滞环比较器和电压源逆变器构成了快速电流控制环,相当于一个高增益的P调节器。此时的逆变器已成为电流可控PWM逆变器,能够将电流强迫输入电动机。这种控制方式使实际电流能够快速跟踪参考电流,提高了系统的响应速度。
此外,电流的调制和控制策略还有斜坡比较控制和预测电流控制。与滞环控制相比,斜坡电流控制的优点是开关频率可以预置,因此不会超过逆变器的开关能力,但比滞环控制要复杂些;预测电流控制就是根据预测的电流变化轨迹来确定期望的定子电压矢量,再使逆变器提供的实际电压矢量与预期的定子电压矢量相等。无论采用何种方法,最终目的是使实际电流能够更好和快速地跟踪指令电流,尽量降低开关频率,且从软硬件上容易实现,又有较低的成本。
3 串联系统的工作原理
基于id=0的矢量控制策略和载波调制PWM技术的两台双Y移30°PMSM串联系统控制系统如图3所示。
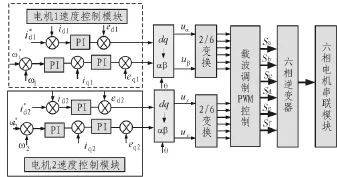
图3 两台双Y移30°永磁同步电动机串联控制技术Fig.3 Two pairs of Y shift ed by 30°control of permanent magnet synchronous motor series
图3中的id,iq,ω,θ都是六相电机串联系统的反馈值。通过电流传感器检测六相逆变器的六相输出电流(该电流实际上包含了两台六相永磁同步电机的定子绕组电流瞬时值之和),然后经过式(1)和(2)的变换矩阵计算变换后分别得到控制电机1的αβ电流分量和控制电机2的xy分量;根据计算得到各电机的位置信号θ,一方面用来进行静止坐标到旋转坐标的变换,分别将电机1的αβ电流分量转变为同步旋转坐标下的电流分量id1,iq1,同理得电机2的电流分量 id2,iq2;位置信号的另一方面用来进行微分得到转速的大小ω[3-4]。
将闭环控制所得到的电压信号分别进行旋转坐标到静止坐标的变换,然后把得到的参考电压经2/6变换,得到每台电机每相的参考电压按照一定的串联相序关系分别相加,得到逆变器输出端的参考电压:再经 PWM 技术输出的 6 路控制信号(SA与 S′A、SB与 S′B、SC与 S′C、SX与 S′X、SY与 S′Y、SZ与 S′Z)分别控制六相逆变器的六个桥臂的上下两个开关器件的导通与关断。
电机1和电机2补偿电压分别为:

为了使单位定子电流的力矩最大,或者在产生所要求的力矩情况下,只需最小的定子电流,因此采用最简单的定子激磁电流分量id=0的控制策略[5]。
4 串联驱动系统的仿真分析
串联系统包括电机串联模块、速度调节模块、坐标变换模块、逆变器模块等。对系统仿真参数设定如下:直流电压Vdc=300 V, 电机参数 R=rs1+rs2=2.875 Ω,L1=8.5 mH,L2=12 mH,ψf1=0.175 Wb,ψf2=0.2 Wb,p1=p2=4,运动参数 J1=0.089 kg·m2,J2=0.1 kg·m2,F1=0.005,F2=0.01。
对串联驱动系统的变速运行情况进行仿真分析。电机1运行在240 r/m,电机2运行在200 r/m,0.5 s时刻电机2加速到350 r/m的仿真波形如图4、图5所示。
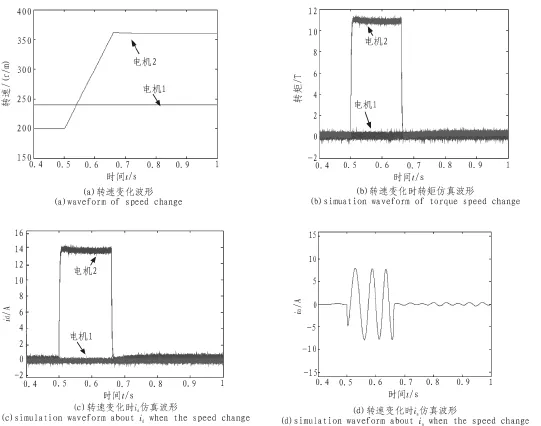
图4 串联系统在电流滞环控制下的波形Fig.4 Hysteresis series system under the control of the current waveform

图5 串联系统在PWM控制下的波形Fig.5 Series system under the control of the PWM waveform
从仿真波形可以看出:两种控制方式对电机转速的控制都能达到预期效果。电流滞环控制的优点是相电流的波动较小,即对电流的利用率较高,适合高功率电机串联的控制;而PWM控制的优点是转矩的波动较小,适合精度较高的电机串联控制,但是,电流利用率不高。
5 结束语
笔者阐述了两台双Y移30°PMSM的串联系统的工作原理,采用电流滞环控制和载波调制PWM控制。在Simulink环境下建立了该串联系统的仿真模型。仿真结果表明:两种控制方式都能很好地控制电机的串联系统,而且各有优缺点。以此为基础,可以对多相电机串联系统进行更深入的研究[6]。
[1]侯立军,苏彦民,陈林,等.多相感应电机调速系统研究、综述[J].机床与液压,2004(4):8-12.HOU Li-jun,SU Yan-min,CHEN Lin,et al.Multi-phase induction machine drive research-a survey[J].Machine Tool&Hydraulics,2004(4):8-12.
[2]陈林.感应电机空间电压矢量选择与控制研究 [D].武汉:华中科技大学,2003.
[3]Levi E,Jones M,Vukosavic S N,et al.A novel concept of a multiphase,multi-motor vector controlled drive system supplied from a single voltage source inverter[J].IEEE Trans actions on Power Elect ronivs.2004,19(2):320-335.
[4]Levi E.Multiphase electric machines for variable-speed applications[J].IEEE Trans.on Industrial Electronics,2008,55(5):1893-1909.
[5]王成元,夏家宽,孙宜标.现代电机控制技术[M].北京:机械工业出版社,2009.
[6]崔纳新,张承慧,孙丰涛.异步电动机的效率优化快速响应控制研究 [J].中国电机工程学报,2005,25 (11):118-123.CUI Na-xin,ZHANG Cheng-hui,SUN Feng-tao.Study on efficiency optimization and high response control of induction motor[J].Journal of Chinese Electrical Engineering Science,2005,25(11):118-123.
猜你喜欢
微电机(2022年1期)2022-03-21
电子与封装(2021年7期)2021-07-29
防爆电机(2021年1期)2021-03-29
新世纪智能(英语备考)(2018年11期)2018-12-29
测控技术(2018年2期)2018-12-09
中国环境监察(2016年7期)2016-10-23
中国现当代社会文化访谈录(2016年0期)2016-09-26
探测与控制学报(2015年4期)2015-12-15
电机与控制应用(2015年10期)2015-03-01
电测与仪表(2014年21期)2014-04-04
