基于RTDS的统一潮流控制器的建模与仿真
2011-05-12 01:30许逵袁旭峰邱国跃
电网与清洁能源 2011年5期
许逵,袁旭峰,邱国跃
(1.贵州电力试验研究院,贵州贵阳,550002;2.贵州大学电气工程学院,贵州贵阳,550003)
统一潮流控制器(Unified Power Flow Controller,UPFC)的概念是由美国西屋科技中心的L.Gyugyi博士于1991年提出。它作为第三代FACTS元件的典型代表,综合了许多FACTS器件的灵活控制手段,被认为是FACTS家族中最复杂、也是最有应用价值的一种元件。它是由STATCOM和SSSC基于共同的直流链路耦合形成,允许有功功率在SSSC和STATCOM的交流输出端双向流动,并在无需任何附加储能或电源设备的情况下即可同时进行有功和无功功率补偿的一种并联-串联组合型FACTS控制器。UPFC具有全面的补偿功能,不但能提供独立可控的并联无功功率补偿,而且可以通过向线路注入相角不受约束的串联补偿电压,同时或有选择地控制传输线上的电压、阻抗和相角,实现有功和无功潮流控制[1-4]。
目前,对于UPFC的仿真,国内外的学者都进行了大量的研究。有的应用Matlab建立了UPFC的动态仿真模型,但由于软件内核的原因,仿真结果不能精确地反映UPFC的电磁暂态过程[5];还有的应用电磁暂态仿真软件EMTP建立了UPFC的动态模型,并对其暂态过程进行了仿真研究,并对并联无功补偿和并串联相结合的补偿进行了仿真分析[5-7]。但目前在实时数字仿真器(Real Time Digital Simulator,RTDS)中对UPFC进行建模仿真研究的文献还不多。
实时数字仿真器RTDS是为实现实时仿真电力系统暂态过程而专门设计的并行计算机系统。它的出现为电力系统的设计、运行及研究提供了新的解决方案,为此在国内外电力系统得到了广泛的应用[8-9]。本文利用RTDS软件设计了UPFC的仿真模型,应用比例积分(PI)控制方法设计了UPFC的控制器,对其模型进行了仿真分析。
1 统一潮流控制器的基本原理
如图1所示为一简化的UPFC原理图。主要的元件是两个逆变器,逆变器1通过变压器和线路并联,逆变器2通过变压器与线路串联。两个逆变器最终通过直流电容器连接。逆变器2产生电压V pq叠加到系统电压上,可以实现线路的无功补偿、串联补偿、相移控制以及综合性的控制目标。逆变器1通过直流电容器提供逆变器2需要的有功,同时,它本身也与系统进行无功的交换。

图1 UPFC简化原理图
2 统一潮流控制器的建模
2.1 变流器电路
并联侧和串联侧的变流器均采用三相桥式全控电路。变流器中的开关器件采用门极关断晶闸管(GTO),为限制开关器件的电流上升速率和电压上升率,并减少器件的开关损耗及瞬态电流,避免二次击穿以及抑制电磁干扰,在GTO上还并联了由电感、电容和二极管构成的导通限流电路。并联侧和串联侧电路图如图2所示。

图2 RTDS中的变流器电路
2.2 脉冲信号调制电路
变流器的门极控制脉冲采用正弦脉宽(SPWM)控制方式,即将波形发生器产生的同步三角波与同步调制波进行合成比较,形成等幅不等宽的脉冲序列,其宽度变化符合正弦函数变化规律[10],电路原理如图3所示。

图3 脉冲信号调制电路
三角载波的产生电路如图4所示。通过锁相环得到输入信号的同步相位后,通过移相比较单元得到合适的信号,再对信号进行分频,最后通过转换电路转换成三角波信号。

图4 三角载波产生电路
2.3 UPFC的控制电路
1)并联侧控制
并联变换器实际上是一个PWM整流器,将其进行矢量变换后的数学模型为[11-12]:

由公式(1)可以直观地看到,旋转3/2变换在系统的d、q轴之间引入了耦合,系统d轴的电流变化会引起q轴的电流变化,反之亦然。由于对于变换到以同步角速度旋转的d、q、0系统中的基波分量都变成了直流量,因此给控制带来了极大的好处,可以采用普通的PI调节器实现输出的无差调节。得到控制系统的框图见图5。

图5 并联变换器的控制框图
由图5可知,并联侧换流器采用的是双闭环控制策略。电压外环由定直流电压控制与定交流电压幅值控制构成,其中给定的直流电压经过PI控制器后的输出值为电流内环的d轴分量,给定的交流电压幅值经过PI控制器后的输出值为电流内环的q轴分量。实际测量所得的三相电流经d-q变换器转换为d-q分量,再与电压外环控制器的输出量进行比较作为电流内环控制器的输入量,经PI调节就可以得到电压的正弦调制波d-q分量,再经过d-q反变换器输出三相电压正弦波。最后经过触发脉冲电路去控制并联变换器。
2)串联侧控制
串联变换器实际上是一个电压型逆变器,将其进行矢量变换后的数学模型为[13-14]:
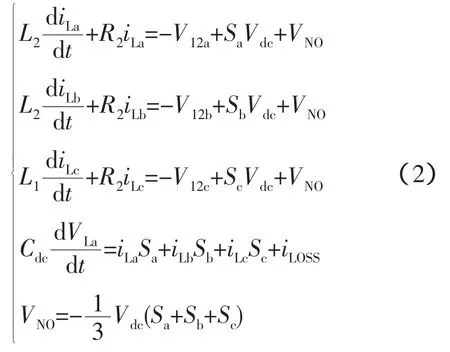
由式(2)可以直观地看到,旋转3/2变换在系统的d、q轴之间引入了耦合,系统d轴的电压、电流变化会引起q轴的电压、电流变化,反之亦然。由于对于变换到以同步角速度旋转的d、q系统中的基波分量都变成了直流量,因此给控制带来了极大的好处,可以采用普通的PI调节器实现输出的无差调节。控制系统的框图见图6所示。

图6 串联变换器的控制框图
由图6可知,串联侧换流器采用的是闭环控制策略。闭环控制由定值无功控制与定值有功控制构成,其中给定的无功分量经过PI控制器,其输出值再与实际测量的三相电流值进行比较后得到电压的d轴分量;同理,给定的有功分量经过PI控制器,其输出值再与实际测量的三相电流值进行比较后得到电压的q轴分量。最后再经过d-q反变换器输出三相电压正弦波。
3 统一潮流控制器的仿真分析
3.1 系统参数设置
用于仿真的系统接线图如图1所示,UPFC装置安装在线路L1的首端。其中,并联侧的线电压有效值为90.5 kV,初相角为0°,串联侧的线电压有效值为90.5 kV,初相角为-10°,输电线路的等效阻抗为Z=3.206+j15.7 Ω。
在UPFC中,并联侧耦合变压器变比为93 kV/11.5 kV,容量为100 MVA,漏抗为18%,YNy接法,串联侧耦合变压器变比为20 kV/11.5 kV,容量为100 MVA,漏抗为10%,直流侧电容Cd=4800 μF。
3.2 未投UPFC时线路的功率
在RTDS软件中对未投UPFC的仿真系统进行仿真,仿真结果如图7所示。
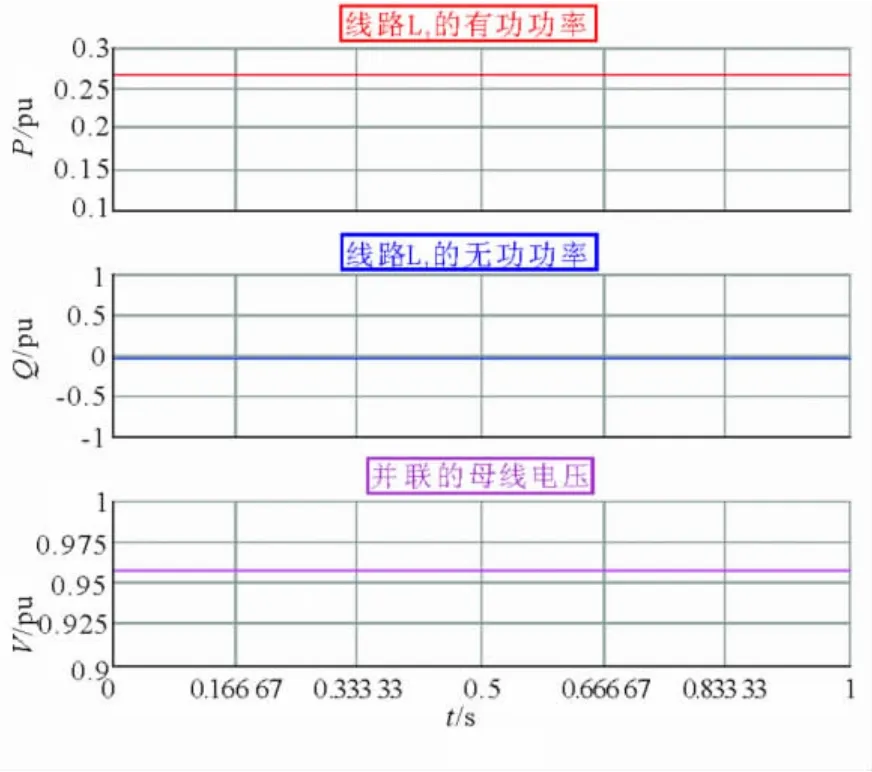
图7 未投UPFC时线路功率及母线电压的波形
由图7可见,线路L1上传输的有功功率为0.268 pu,传输的无功功率为0 pu,并联侧母线电压值为0.968 pu。
3.3 线路的有功功率调节
此仿真的目的是观察在线路L1上投入UPFC后,对线路的有功功率的调节能力。对UPFC装置的参数进行设定:线路给定有功输入为0.4 pu,无功给定输入为0.0 pu,并联侧母线电压给定输入为1.0 pu。在系统稳态运行0.2 s时,将UPFC控制开关BLOCK置为1,使UPFC投入。仿真结果见图8所示。
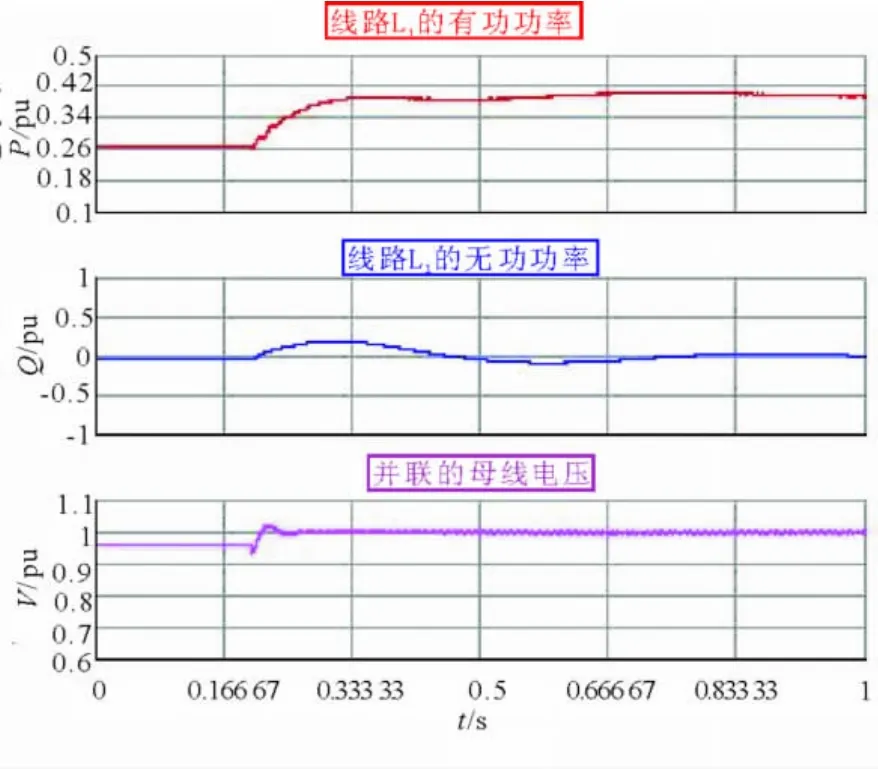
图8 投入UPFC时仿真结果
由图8可见,线路L1上传输的有功功率由0.268 pu经过一段时间上升后达到稳定值0.4 pu,传输的无功功率经过一段时间的波动后达到稳定值0.0 pu,并联侧母线电压值由0.968 pu上升一段时间后达到稳定值1.0 pu。当线路有功功率变化时无功功率出现波动是由于采用空间矢量控制算法解耦时,控制有功功率的q轴电压分量会影响d轴的电压分量,从而使得无功功率和电压都出现波动。
3.4 线路的无功功率调节
此仿真的目的是观察在线路L1上投入UPFC后,对线路的无功功率的调节能力。对UPFC装置的参数进行设定同3.3节,只修改无功功率的参数设定值为0.4 pu。仿真结果见图9所示。
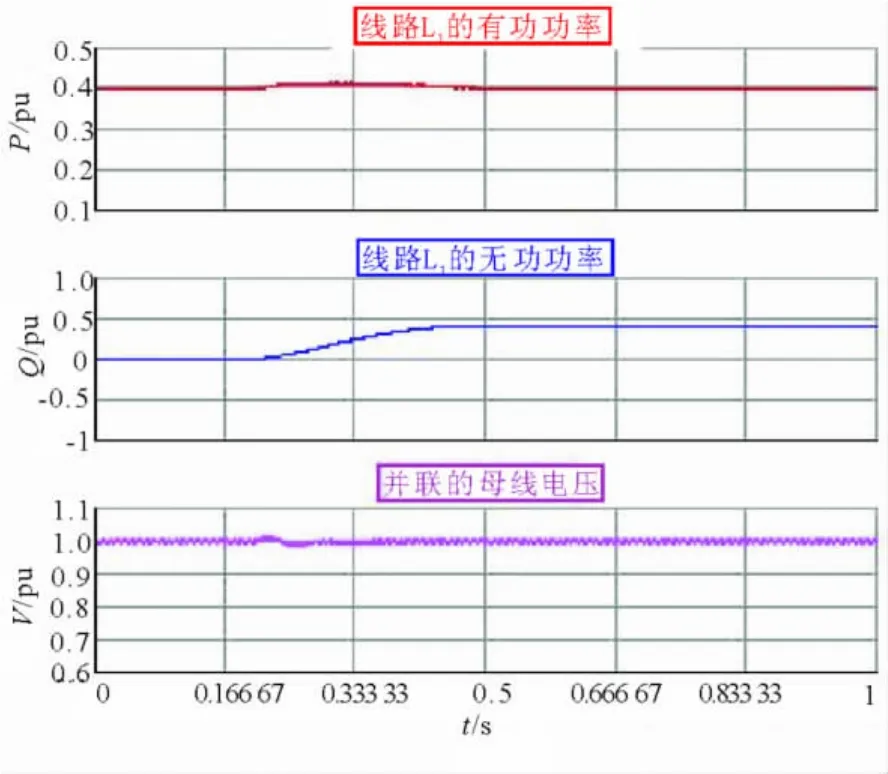
图9 调整UPFC的无功功率后线路功率及母线电压的波形
由图9可见,线路L1上传输的无功功率经过一段时间上升后达到稳定值0.4 pu,线路L1上传输的有功功率始终维持在稳定值0.4 pu,并联侧母线电压值也始终维持在稳定值1.0 pu。当线路无功功率变化时,由于d轴分量和q轴分量相互影响,线路的有功功率出现波动。
3.5 UPFC对线路故障时的特性仿真
此仿真的目的是观察在线路L1上投入UPFC后,故障对线路的影响情况。故障设置在线路L1的首端,类型为三相接地故障,持续时间为0.04 s,同时对UPFC装置的参数进行设定同3.4节,有功功率设为0.5 pu。仿真结果见图10所示。

图10 故障时投入UPFC的线路功率及母线电压的波形
由图10可见,线路L1上有功功率从0.5 pu降到0.45 pu,有功损失为10%,且在故障消除后,有微小的振荡,大概在0.02 s后趋于稳定;无功功率从0.4 pu降到-0.05 pu,无功功率反相,在故障消除后,仍有微小的振荡,大概在0.3 s后趋于稳定;母线电压从1 pu降到0.8 pu,电压损失为20%,故障消除后电压初步上升,大概在0.01 s达到稳定。
4 结论
由上述仿真分析可见,采用双闭环控制策略设计的统一潮流控制器(UPFC),能够快速、有效的控制线路潮流,并具有良好的电压调节能力。而且在线路出现故障时后,也能保持良好的暂态响应。说明了本文在RTDS中搭建的UPFC模型的正确性,为以后在RTDS中进一步研究UPFC的其他功能特性奠定了基础。
[1] KERIAJF,LOMBARD X,EDRIS A A,etal.Unified Power Flow Controller(UPFC):Modeling and Analysis[J].IEEE Transactions on Power Delivery,1999,14(2):648-654.
[2] 谢小荣,姜齐荣.柔性交流输电系统的原理与应用[M].北京:清华大学出版社,2006.
[3] 马凡.UPFC控制及动态特性实验研究[J].电网技术,2007,31(17):64-65.
[4] 刘黎明,康勇,陈坚,等.UPFC的交叉耦合控制及潮流调节能力分析[J].电机工程学报,2007,27(10):43-48.
[5] 王庆红,胡国根.统一潮流控制器的Mat lab仿真建模[J].电网技术,2000,24(9):22-25.
[6] 杨少勇,林集明,陈葛松.统一潮流控制器电磁暂态过程数字仿真的初步研究[J].电网技术,2000,24(2):20-24.
[7] UZUNOVIC E.EMTP Transient Stability and Power Flow Model and Control of VSC Based FACTS Controllers[D].Ontario:University of Waterloo,2001.
[8] 章建玲,余雷,许汉平,等.RTDS用于FACTS元件特性仿真的研究[J].华中电力,2003,3(16):21-22.
[9] 叶林,杨仁刚,杨明皓,等.电力系统实时数字仿真器RTDS[J].电工技术杂志,2004(7):49-52.
[10] 陈国呈.PWM变频调速及软开关电力变换技术[M].北京:机械出版社,2001.
[11] 王勉华.三相PWM整流器研究[J].电工技术学报,1996,11(4):27-30.
[12] 史伟,蒋全.三相电压型PWM整流器的数学模型和主电路设计[J].东南大学学报:自然科学版,2002,32(1):50-55.
[13] 彭力.基于状态空间理论的PWM逆变电源控制技术研究[D].武汉:华中科技大学,2004.
[14] 康勇.高频大功率SPWM逆变电源输出电压控制技术研究[D].武汉:华中科技大学,1994.
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22
新世纪智能(英语备考)(2018年11期)2018-12-29
中国环境监察(2016年7期)2016-10-23
中国现当代社会文化访谈录(2016年0期)2016-09-26
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年5期)2016-03-22
探测与控制学报(2015年4期)2015-12-15
电测与仪表(2015年4期)2015-04-12
电测与仪表(2015年5期)2015-04-09
电机与控制应用(2013年9期)2013-11-21