
平底偏置直动从动件凸轮机构的参数化设计及运动仿真
2011-05-11 02:49汤兆平孙剑萍
制造业自动化 2011年7期
汤兆平,孙剑萍
(1. 华东交通大学 机电工程学院,南昌 330013;2. 华东交通大学 轨道交通学院, 南昌 330013 )
平底偏置直动从动件凸轮机构的参数化设计及运动仿真
汤兆平1,孙剑萍2
(1. 华东交通大学 机电工程学院,南昌 330013;2. 华东交通大学 轨道交通学院, 南昌 330013 )
0 引言
平底从动件凸轮机构凸轮副润滑条件好,传动效率高,传力性能好,广泛应用于各种高速机械和自动控制装置[1]。
凸轮机构借助凸轮轮廓曲线的变化可使从动杆实现预期的、任意复杂的运动规律。其运动可分为推程、远停程、回程和近停程四个过程,典型从动件的推程和回程均有等速、等加减速、余弦加速度、正弦加速度四种运动规律,可形成16种典型的运动规律组合。平底偏置直动从动件凸轮机构,因从动件导路中心不通过凸轮回转中心,且从动件的端部为平底,给求解凸轮工作轮廓增加了难度。
要实现平底偏置直动从动件凸轮机构的全参数化设计参数化设计的关键之一是凸轮能根据从动件不同的运动规律,自动生成轮廓。考虑到从动件要能实现16种复杂的运动规律组合,可将推程和回程设计为参数。推程参数tui及回程参数hui,可取1,2,3,4,分别对应等速、等加减速、余弦加速度、正弦加速度四种典型运动规律。
关键之二是从动件的偏置有左偏和右偏之分。可取从动件的偏置参数pian为 1或-1,分别对应右偏和左偏,从而通过关系设置,控制从动件的偏置方向。
关键之三是不同的凸轮转角,从动件要实现对应的位移。参照传统图解法的反转法原理,将从动件在不同部位,沿偏距圆切线方向(即上述一系列基准平面与凸轮端面交线方向)向外移出一个位移量。这些位移量可用程序、关系与参数控制。
在完成精确参数化建模基础上,进一步生成凸轮副,应用虚拟装配与运动仿真技术,实现在设计阶段可视地对装配进行干涉检测以及产品设计的合理性分析,为后续的虚拟制造打下基础。
1 凸轮参数化建模的步骤
1.1 建立设计凸轮的相关参数

表1 参数设置表
利用Pro/E 提供的参数(Parameters),将平底偏置从动件凸轮机构的模数、螺旋角、旋向、齿数等参数设置如表1所示。
1.2 创建所需基准面、基准点和曲线
1.2.1 所需基准面的创建
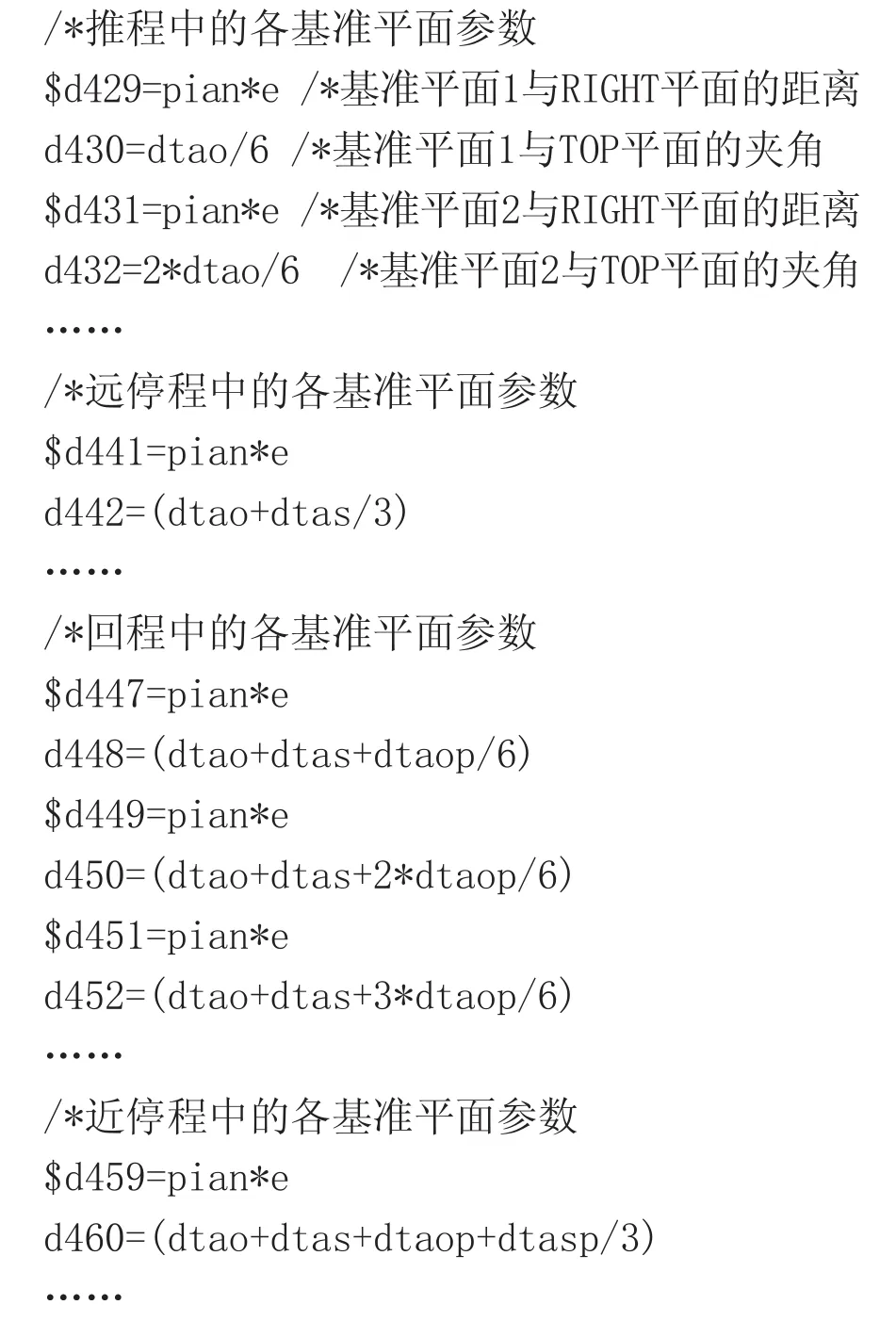
为实现凸轮机构从动件左偏置和右偏置的参数化。可根据传统凸轮轮廓求解的反转原理,建立一系列基准平面对应于反转法中从动件不同转角的位置,并用参数及关系驱动这些基准平面与TOP平面的夹角、基准平面与RIGHT平面的距离。
1.2.2 凸轮理论轮廓的绘制
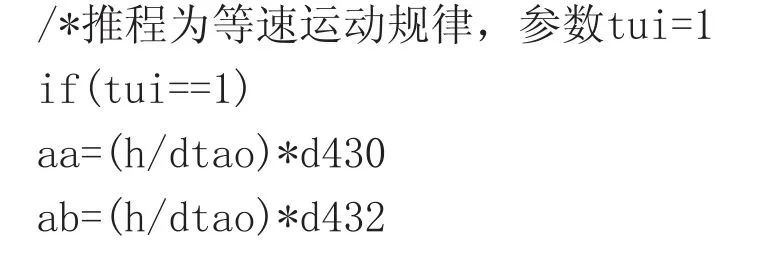
以front平面为草绘面,在默认参照下,利用传统的反转法,草绘出凸轮理论轮廓(图1)。要使从动件能实现推程和回程16种典型的运动规律组合,可利用Pro/E 提供的关系(Relations)功能,输入各点对应于凸轮转角的位移关系。

回程各点对应于凸轮转角的位移,可通过设置参数hui,类似以上方法定义。
理论轮廓上各点离偏心圆切点的距离可通过以下关系定义。
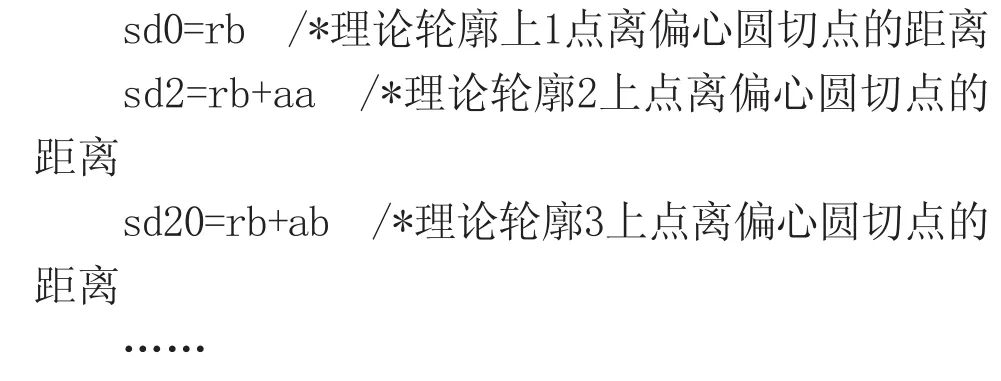

图1 凸轮理论轮廓的绘制
1.2.3 凸轮工作轮廓的绘制及凸轮、滚子、从动杆、机架等零件的建模
建立一与right平面平行,距离为偏距值的基准面,并以right及top平面交线为轴线,进行轴阵列,得一系列基准面,作为后面绘制一系列平底线的垂直约束参考。
在凸轮理论曲线上均匀地建立一系列基准点。以front平面为草绘面,选默认的基准面,加上刚才建立的系列基准面为参照,分别以凸轮理论曲线上的基准点为中心,绘制一系列直线,并对这些直线添加与那一系列基准面垂直的约束(如图2a所示)。画这些直线的包络线,就得到其工作轮廓(如图2b所示)。

图2 一系列平底线及凸轮工作轮廓
双向对称拉伸该草绘,即可得到凸轮零件模型。由于是全参数化设计,改变参数便可得到形状尺寸不同的零件模型。
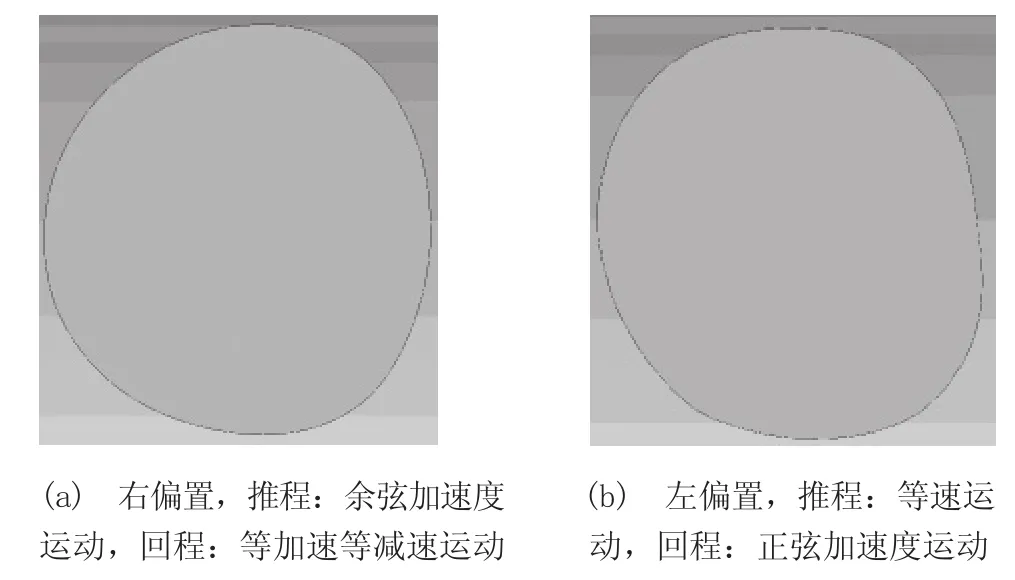
图3 凸轮轮廓对比图
再依次对滚子、从动杆、机架等零件进行参数化建模。建模时,应充分考虑它们的装配关系来设计位置、形状和尺寸,并建立好装配时所需的基准点和基准轴。
2 凸轮机构的虚拟装配
新建一装配图,首先引入机架元件,缺省方式装配。接着再引入从动件,以圆柱连接方式装配,选择从动杆的轴线与机架安装从动杆的孔的轴线。最后引入凸轮,采用销钉连接的方式,选择凸轮的旋转轴线与机架安装凸轮的轴线对齐,凸轮零件的front平面与机架的front平面平移。

图4 装配图(a)及创建凸轮从动机构连接图(b)
3 凸轮机构的运动仿真
连接定义完成后,可以通过机械模块给它们添加相应的驱动,进行运动仿真。
选择应用程序——机构(Mechanism),进入机构模块。
3.1 创建凸轮从动机构连接
单击“拖动已装配零件(Drag)”按钮,打开“拖动”对话框。在对话框中可移动从动件高度使其接近凸轮,也可通过拖动旋转凸轮调整凸轮与从动件接触的起始位置。
单击“定义凸轮从动机构连接(Cam-Follower Connection Definition)”按钮,打开“凸轮从动机构连接”对话框。在“凸轮1(Cam1)” 和“凸轮2(C a m 2)”选项卡上,勾选“自动选取(Autoselect)” 复选框,分别选取凸轮曲面和从动件平底底部的一直线(该直线是为定义凸轮副而绘制,它在平底底平面上,过平底中心,与从动杆轴线垂直)。
3.2 创建弹簧和阻尼器
在机架和从动件之间添加一个弹簧和一个阻尼器。单击“定义弹簧(Springs)”按钮,新建一Spring1,在“参照类型 (Reference Type) ”下选取“点至点”(Point-to-Point),并分别选取事先为运动仿真而在机架元件和从动杆上建立的基准点。在“属性 (Properties)”区域输入100作为弹簧刚度常数k的值,输入60作为弹簧未拉伸时长度U的值,在“图标直径 (Icon Diameter)” 区域输入 20。
单击“阻尼器(Dampers)”按钮,新建一Damper1,阻尼器的“参照类型”与弹簧一致,“属性(Properties)”区域输入100作为阻尼系数C的值。
3.3 定义伺服电动机和运动分析参数
点击“定义伺服电动机(Servo Motor Definition)”按钮,新建ServoMotor1,在“类型”标签中选取装配凸轮时定义的销钉连接轴为连接轴、移动类型为旋转,以凸轮运动的方向为旋转方向;在“轮廓”选项卡中定义:规范设置为速度,模设置为常数,A设置为18。
点击“运动分析”按钮,新建AnalysisDefinition1,在其对话框优先选项卡中,设置开始时间、长度与帧频。设置终止长度为20(因前面定义伺服电动机速度的模设置为18,20×18=360,正好转一圈),帧频设置为36,单击运行,可以观看机构的运行情况。
4 仿真结果的分析
4.1 干涉分析
在机构模块中,点击“回放”按钮,可在对话框干涉选项卡中,动态地检测各零件间干涉情况;点击播放当前结果集——捕获,可制作mpg格式的影片。
4.2 运动参数分析
机构模块中可进行分析测量的量有:位置、速度、加速度、连接反作用、净负荷、冲力等[2]。

图5 凸轮机构运行时的位移、速度、加速度线图(右偏置,推程:余弦加速度运动,回程:等加速等减速运动)
点击“生成分析的测量结果”按钮,在测量栏内新建Measure1、 Measure2、Measure3,分别测量从动件的位移、速度、加速度。选中“分别绘制测量图形”,点击对话框中“绘制选定结果集所选测量的图形”按钮,设定的量将以图形和数据的形式输出,直观准确(如图5、图6所示)。
从以上运动仿真输出的图形中可以看出:
1)图5中凸轮机构位移、速度线图中推程基本呈余弦加速度运动规律,回程也基本呈等加速等减速运动规律变化,与理论运动规律吻合;凸轮机构位移、速度的值也与理论值吻合。
2)图6中凸轮机构位移、速度线图中推程基本呈等速运动规律变化,回程基本呈正弦加速度运动规律,与理论运动规律吻合;凸轮机构位移、速度的值也与理论值吻合。

图6 凸轮机构运行时的位移、速度、加速度线图(左偏置,推程:等速运动,回程:正弦加速度运动)
3)图5及图6中凸轮机构加速度线图走势,基本与它们的理论运动规律吻合。尽管在某些地方存在一定偏差,如图5中凸轮转角120°及265°、290°处,但这主要与包络线法求凸轮工作轮廓本身的误差有关,相对手工图解法仍然大大提高了设计精度。
5 结论
本文利用功能强大的设计软件pro/e,对复杂的平底偏置直动从动件凸轮机构进行了全参数设计与运动仿真,不但能实现较高精度的建模,而且实现了对推程与回程,组合形成16种典型的运动规律的全参数设计。极大地提高了设计柔性。
[1]廖海平,刘启跃,曾翠华,任红兵.平底直动从动件盘形凸轮机构弹流润滑设计[J].机械设计,2009,26(5):71-72.
[2]二代龙震工作室.Pro/ENGINEER Wildfire 4.0 高级设计[M].北京:电子工业出版社,2008.
The parametric design and motion analysis of disc cam mechanism with straight motion and deviation falted-faced follower
TANG Zhao-ping1, SUN Jian-ping2
平底从动件凸轮机构传动效率高,传力性能好,能实现复杂的运动规律。在Pro/E Wildfire 2.0的环境下,对平底偏置直动从动件凸轮机构进行了全参数化设计。系统可提供16种典型的从动件运动规律组合及左右2种偏置情形供用户选择,根据输入的参数,自动生成凸轮的实际廓线,并应用虚拟装配与运动仿真技术,实现在设计阶段可视地对装配进行干涉检测以及产品设计的合理性分析。
机构设计;平底从动件凸轮机构;Pro/E;参数化设计;运动仿真分析
汤兆平(1970 -),男,江苏常州人,副教授,硕士,研究方向为图形与图像技术、机电控制技术。
TH166;TP391.7
A
1009-0134(2011)4(上)-0105-04
10.3969/j.issn.1009-0134.2011.4(上).33
2010-10-27
江西省载运工具与装备重点实验室资助
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
中国信息化(2022年5期)2022-06-13
汽车工艺师(2021年7期)2021-07-30
兰州理工大学学报(2021年3期)2021-07-05
鸭绿江·华夏诗歌(2020年4期)2020-06-15
制造技术与机床(2019年8期)2019-09-03
诗潮(2018年5期)2018-08-20
精密制造与自动化(2018年1期)2018-04-12
制造技术与机床(2017年5期)2018-01-19
电子制作(2017年13期)2017-12-15
