
基于MATLAB/Simulink的BLDC直接转矩控制系统仿真
2011-05-10 11:05李晓竹
制造业自动化 2011年17期
李晓竹,姚 刚
(辽宁工程技术大学,葫芦岛 125105)
0 引言
具有梯形波反电动势的无刷直流电机 (BLDC)运行效率高、起动转矩大、运行可靠,但其转矩脉动较大[1],限制了其在高精度和稳定性场合中的应用。为了实现无刷直流电机高性能控制,有研究人员引入了BLDC直接转矩控制方案[2,3],该方法对定子磁链和电磁转矩进行直接控制,转矩脉动得到抑制,具有较快的动态响应。考虑到BLDC定子磁链计算复杂,文献[4]提出了转矩滞环单环控制方案,省略了磁链给定,方案有效抑制了非理想反电势和低速时的转矩脉动。在上述方案中,转子位置经由霍尔传感器得到,但传感器的使用在增加了成本的同时也降低了系统的可靠性。滑模观测器对外界扰动具有较好的鲁棒性,适用于电机位置和转速估算。李先祥[5]等利用滑模观测器原理,实现了BLDC转子位置和转速的实时在线估计。系统采用基于边界层控制法抑制滑模观测带来的颤动,鲁棒性强。文献[6,7]提出了借助线反电动势过零检测获取无刷直流电机转子位置的方法,结构简单、计算方便。
本文使用滑模观测器取代霍尔位置传感器来获取转子位置信号,并将其运用到BLDC直接转矩控制方案中。利用MATLAB/simulink搭建了系统模型,仿真结果表明,观测器估算位置结果较准确,转矩脉动得到抑制。
1 BLDC数学模型
本文采用120º两两导通换相方式的三相桥式Y接无刷直流电机,转子为隐形内转子结构。忽略电机的磁路饱和、涡流磁滞损耗和齿槽效应,不计电枢反应。实际应用中,由于无刷直流电机定子绕组大多为Y接且中性点不引出,相电压难以直接测量。为此,以定子线电压平衡方程为基础,给出两相静止坐标的电压和转矩方程:
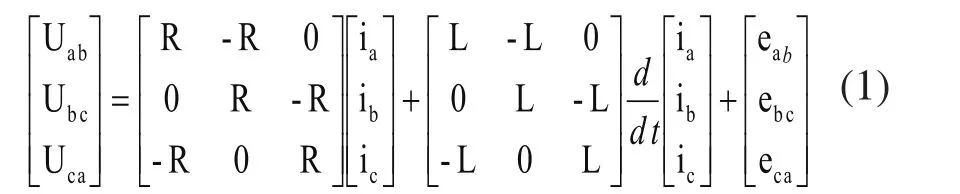
式中,Uxx、ix、exx分别为定子绕组线电压、相电流和线反电动势;R为定子绕组电阻;L=Ls–M为绕组电感,其中Ls为自感,M为互感。将上式变换到静止α、β坐标系下:
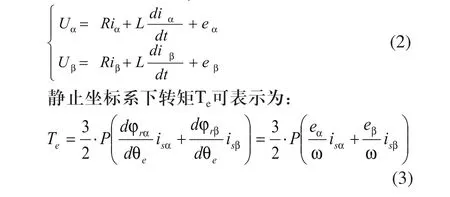
式中P为电机极对数,θe为转子电角度,ω为电角速度。
2 无位置传感器控制策略
2.1 滑模观测器设计
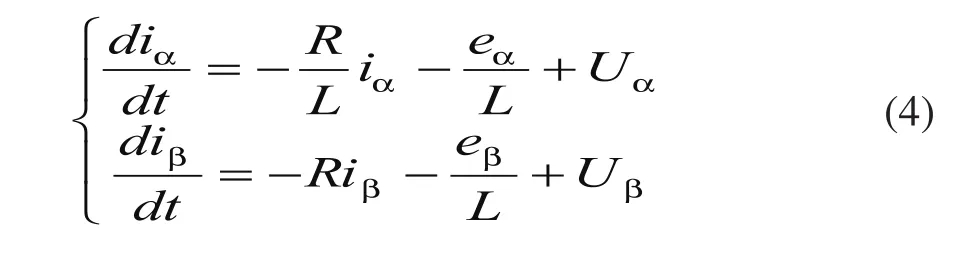
选取定子电流为状态变量,则(2)式变为:
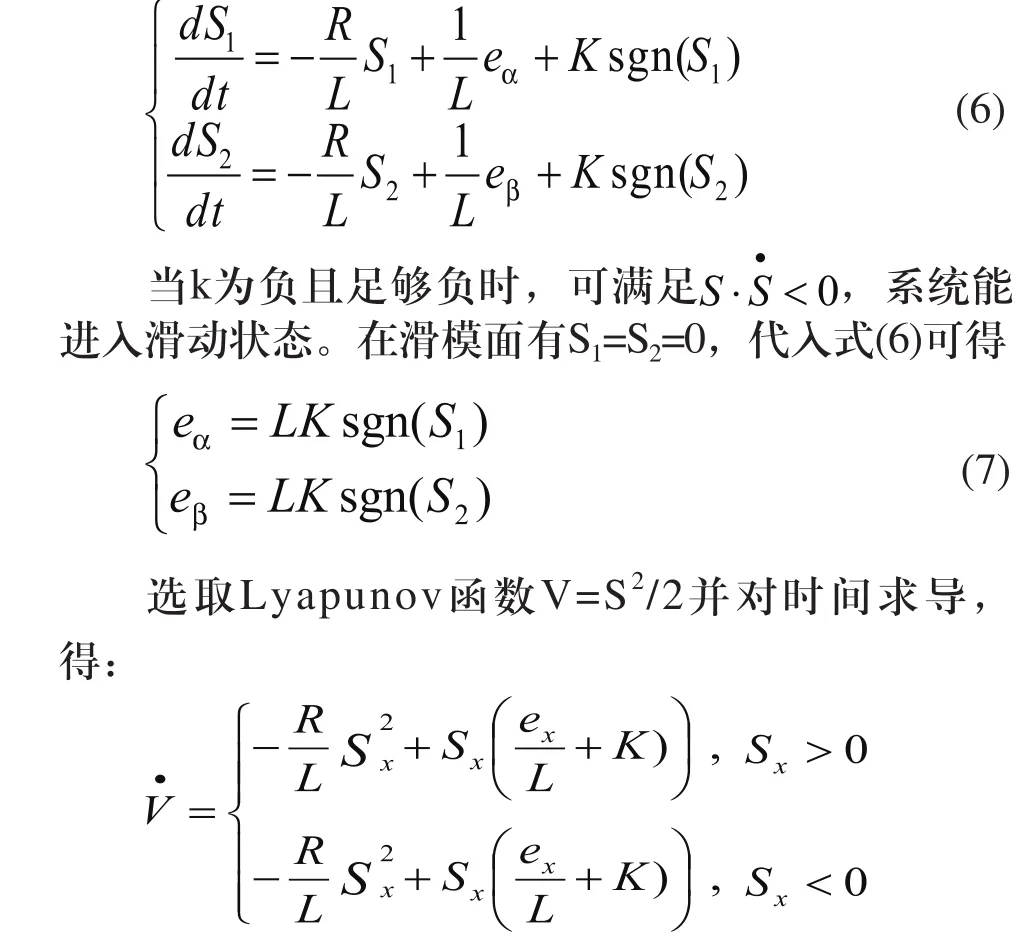
以“ˆ”表示对应变量的估计值,定义滑模面和符号函数分别为:

式中K为滑模增益系数。由(4)、(5)两式可得滑模观测器动态方程为:

2.2 转子位置估计
对于采用两两导通控制方式的无刷直流电机,每个电周期中需换相6次,要进行转子位置估计,需要检测决定换相点的6个位置信号。由图1给出的模拟线反电势波形可以看出,每一周期,线反电动势产生两次过零点,因此,确定三相线反电动势后,进行过零检测即可得到所需的6个换相点。式(7)给出了滑模观测器得到的线反电动势信号,对其进行低通滤波和相位补偿[3]后进行Clack逆变换即可得到线反电势Eab、Ebc、Eca。
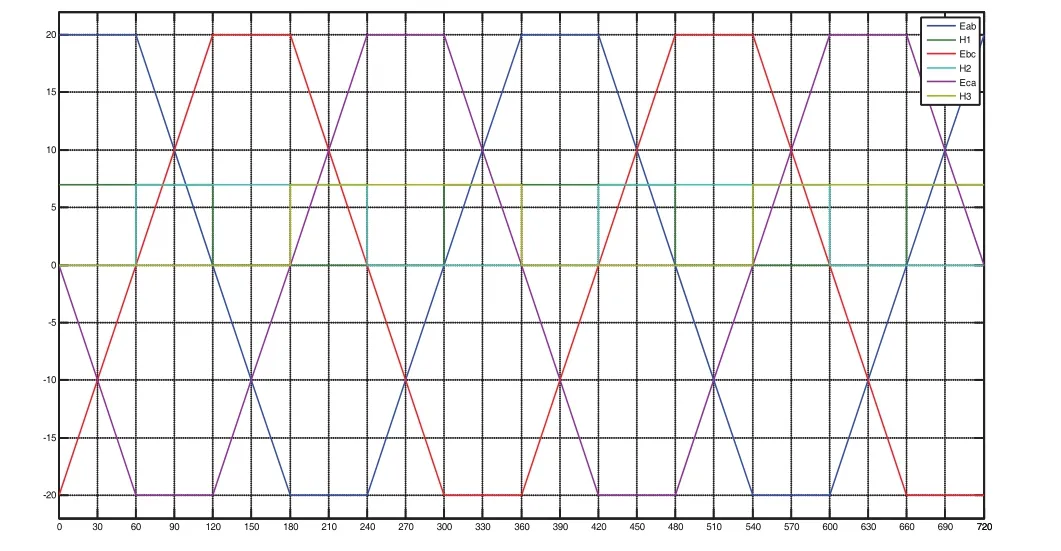
图1 反电动势及对应转子信号
3 基于MATLAB的系统仿真模型搭建
系统基于MATLAB/Simulink所搭建的系统仿真平台整体结构如图2所示。所采用的无刷直流电机直接转矩控制方案以转矩为控制内环,速度为控制外环。双环控制策略中,给定转矩由速度PI调节器获取,反馈转矩按(3)式计算得到;逆变器PWM工作信号由转矩滞环输出和转子位置共同决定。利用式(3)进行转矩计算时需用静止坐标系下线反电动势、相电流和电角速度。从上节推到过程可看出,利用滑膜观测器可得到到所需的线反电动势信号。将其加入控制方案原理可行。为提高搭建平台的控制精度,系统反馈电角度由Simulink测量模块得到。
在实际应用中,无刷直流电机主电路通常采用交直交方式,由三相或单相电源供电,整流后送入逆变模块,其驱动电路通常由IGBT或MOSFET组成。本文所搭建平台省去了整流部分,主电路采用直流电源-逆变器结构,逆变器开关器件选用IGBT。

图2 基于MATLAB/Simulink搭建的系统仿真平台
4 系统动态试验仿真分析
利用MATLAB/Simulink所搭建的电机控制系统中,电机参数为:极对数P=4;额定电压Udc=36V;额定转矩TN=0.32N.m;额定转速nN=3000r/min;相电阻R=1.6Ω;等效电感LS=8mh;给定转速2000r/mim。为验证系统动态性能,设定电机空载起动,采用三段式起动方式[8],运行0.1s后突加负载,待系统运行0.1s后恢复空载。图3(a-d)分别给出了静止坐标系下观测电流与实际电流分量、观测到的线反电动势分量、电机给定转速和估算转速、转矩响应结果。由无刷直流电机机械特性可知,当突加负载后,电机转速出现下降,电流增大的同时将引起转矩增大以平衡负载转矩。仿真结果可以看出,突加负载后,定子电流分量增大,转速变小,但最大转速降落差小于10r/mim,卸载0.05秒后转速趋于稳定。整个过程中,转速无超调,电磁转矩波动得到有效抑制,取得了较为满意的控制效果。
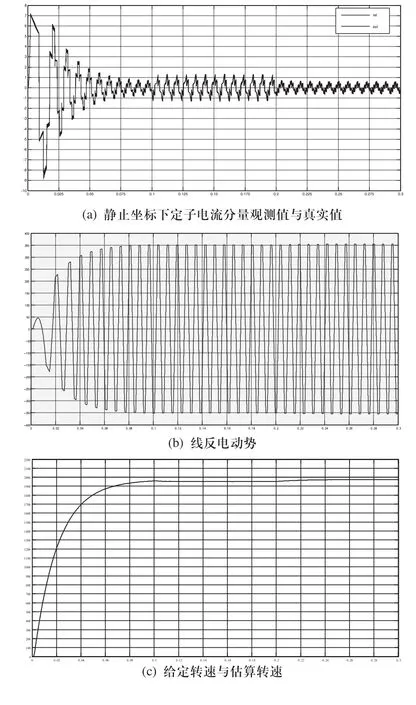

图3 静止坐标系下观测结果
5 结论
本文基于定子线电压模型,利用滑模观测器实现了定子线反电动势的观测,对其进行过零检测得到转子位置。在无刷直流电机单转矩滞环控制策略中,以观测器位置观测法取代霍尔位置传感器,根据转矩滞环输入和位置估算选择施加电压矢量,有效的抑制了换相转矩波动,具有良好的动态性能,得到了较好的控制效果。
[1] Carlson R,Lajoie-Mazenc M,Fangundes J C S.Analysis of torque ripple due to phase commutation in brushless DC machines.IEEE Transactions on Industry Application,1992,28(3):632-638.
[2] Salih Baris Ozturk,Hamid A Toliyat.Direct Torque Control of Brushless DC Motor with Non-sinusoidal Back-EMF [J].IEEE,2007:165-171.
[3] Liu Y,Zhu Z Q,Howe D.Direct torque control of brushless DC drives with reduced torque ripple.IEEE Transaction on Industry Application,2005,41(2):599-608.
[4] 安群涛,孙立志,刘超,等.无刷直流电机的磁链自控直接转矩控制[J].中国电机工程学报,2010,30(12):86-91.
[5] 李先祥,朱自芳,赵惠民.基于滑模观测器的无刷直流电机无位置控制系统设计[J].电路与系统学报,2009,14(2):79-83.
[6] Shao(2003).Direct Back EMF detection method for sensorless Brushless DC Motor drives.Department Electrical Engineering,Virginia Polytechnic institute Virginia.
[7] 李志强,夏长亮,陈炜.基于线反电动势的无刷直流电机无位置传感器控制[J].电工技术学报,2010,25(7):38-44.
[8] 史婷娜,吴曙光,方攸同,等.无位置传感器永磁无刷直流电机的起动控制研究[J].中国电机工程学报,2009,29(6):111-116.
猜你喜欢
大电机技术(2022年5期)2022-11-17
微电机(2022年8期)2022-10-12
汽车实用技术(2022年12期)2022-07-05
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
郑州大学学报(工学版)(2020年2期)2020-06-16
汽车电器(2019年2期)2019-03-22
北京航空航天大学学报(2017年6期)2017-11-23
科教导刊·电子版(2017年16期)2017-07-21
电子制作(2017年1期)2017-05-17
