无轴承永磁同步电机启动控制研究
2011-04-26 06:03:28魏劲夫朱熀秋于晶
电气传动 2011年2期
魏劲夫,朱熀秋,于晶
(江苏大学 电气信息工程学院,江苏 镇江 212013)
1 引言
无轴承永磁同步电机是具有无轴承技术的永磁同步电机。它的出现不仅拓展了高速电机的应用领域如微型化、大功率等,其独具的悬浮机理和结构特点使之在一些高新技术领域具有传统电机无法实现和替代的技术和经济优势。
转子磁场定向控制方法是实现无轴承永磁同步电机有效的解耦控制方法。而精确检测无轴承永磁同步电机转子初始位置是实现转子磁场定向控制系统的基础。为了实现无轴承永磁同步电机的可靠启动,前人提出了许多控制方法。文献[1]提出了利用电动机的反电动势,检测定子电压和电流值来估计转子磁链和转速。这种方法的优点是比较简单和有效的,但是在低速时对定子电压和电流值的变化十分敏感,而在静止时由于转速为零,反电动势也为零,不可能估计出转子的初始位置。高频注入法通过向电机定子绕组施加高频电压信号,检测相应定子电流幅值,利用电流幅值在空间上的各向差异性,估计出转子实际位置[2]。这种方法可以应用于凸极和隐极式同步电动机,但是需要复杂的数学模型推导。
本文首先利用霍耳位置传感器进行无轴承永磁同步电机转子初始位置的粗测,再运用二分搜索法精确定位,在此基础上采用转子磁场定向控制方法实现电机的快速稳定启动。该启动定位方法软件实现简单,使无轴承永磁同步电机快速、稳定启动,具有安全、可靠的优点。本文实验是在未加入径向悬浮力的二自由度无轴承永磁同步电机启动控制实验平台上完成的,目的在于实现电机的稳定运行,为电机的悬浮奠定基础。仿真和实验结果验证了该方法的可行性。
2 无轴承PMSM转矩绕组数学模型
无轴承永磁同步电机转矩绕组的数学模型是一个多变量、非线性、强耦合的系统,根据交流电机的解耦思想,将电机的三相定子绕组坐标系(ABC)等效变换为两相静止坐标系(α β),再经过Park变换,变换为dq坐标系,其d轴和永磁转子N极同向。经过以上变换,就完成了电机转矩绕组的解耦过程,如图1所示。θ为d轴和α轴之间的夹角,为转子初始位置角。
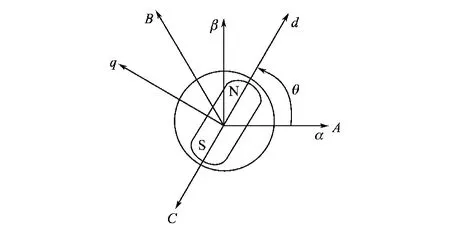
图1 无轴承永磁同步电机转矩绕组数学模型Fig.1 The mathematic model of bearingless PMSM′s torque windings
无轴承永磁同步电机转矩绕组的电压方程、磁链方程与电磁转矩方程分别为[3]
3 无轴承PMSM启动控制
首先,霍耳位置传感器上电后,其U,V,W相输出信号对应电机转子初始位置所处扇区,完成对转子初始位置的粗测。然后结合矢量控制方法设计转子磁极搜索方法,完成对转子位置的精确定位。最后完成无轴承永磁同步电机的启动控制。
3.1 转子初始位置粗测
位置初测采用霍耳位置传感器,传感器的对数与电机极对数保持一致。它输出3路彼此相差120°,占空比为0.5的脉冲信号U,V,W。这三相中的任一相在转子旋转一周中,发出与极对数相同的脉冲个数。在360°(电角度)范围内,该三相信号输出6种不同的状态,每个状态宽度为60°,由此判断转子所处扇区。U,V,W三相霍耳脉冲信号与电角度的关系如图2所示。
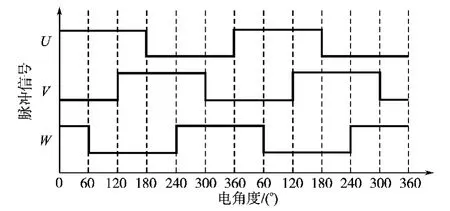
图2 三相霍耳脉冲信号与电角度的关系图Fig.2 T he relationship among 3-phase signals of Hall position sensor and electric deg ree
3.2 二分搜索法精确定位
通过霍耳位置传感器获得电机转子所处扇区后,可采用二分搜索法完成对转子磁极位置的精确定位。
二分搜索法确定磁极过程如下。
1)通过霍耳位置传感器,确定转子磁极所在区间为[θmin,θmax] 。
2)设转子初始磁场位置角 θ1=(θmax+θmin)/2,按照θ1给电机一个电流矢量Is,产生特定方向的定子磁场,记录当前电机转子的初始位置φ0。
3)在电流矢量Is的作用下,电机产生微小转动,记录此时转子位置 φ1,计算 φ1和 φ0的差值:

此时将出现下列3种情况:
①如果Δφ>0,电机顺时针旋转,说明当前Is产生的定子磁场牵引转子顺时针方向旋转,则θ处于[,]之间,对应情况如图 3a所示。其中,A轴为静止坐标系坐标轴,α-β轴为两相静止坐标系,Is为定子电流矢量,θ1为定子电流矢量Is与A相轴线之间的夹角(电角度),和A相轴线轴的夹角即为转子磁场空间电角度θ。
②如果Δφ<0,电机逆时针旋转,说明当前Is产生的定子磁场牵引转子逆时针方向旋转,则θ处于[]之间,对应情况如图3b所示。
③如果 Δφ=0,电机停转,说明当前定子磁场方向与转子磁极位置中心线重合,对应情况如图3e所示。
4)如果出现第①种情况,那么令 θmin=θ1,如图3c所示;如果出现第②种情况,那么令=θ1,如图3d所示。然后重复第2)步和第 3)步,直到电机转子停止转动;如果出现第③种情况,那么搜索过程结束。则当前所通的电流矢量的电角度就是转子的电角度。

图3 二分搜索法进行转子定位过程示意图Fig.3 The process of locating rotor position by binary search method
二分搜索法的结束条件是电机转子静止在某一位置不再转动,或者转子估计角满足精度要求。若磁场角精度或最小分辨率为ε,则最多查询次数为

3.3 无轴承PMSM启动控制
无轴承永磁同步电机转子初始定位完成后,如图3e所示,转子d轴在转子气隙空间位置角θ位置上(转子d轴方向定义为转子表面永磁体N极所指的方向)。采用转子磁场定向控制,转矩绕组矢量控制的Park逆变换公式为[4]

4 无轴承PMSM启动控制系统
本启动控制系统控制器采用 TI公司的TMS320F2812,它是TMS320C2000平台下的一种定点DSP芯片,广泛应用于电机的数字控制领域,其内部集成的正交编码QEP模块能够方便地处理正交编码信号输入及Z脉冲信号。主回路采用智能功率模块(IPM),用于驱动三相定子绕组。霍耳传感器和增量式光电编码器用于转子的位置检测。实验样机参数为:额定功率P=1 kW,额定转速n=6 000 r/min,转矩绕组极对数pM=2。图4为无轴承永磁同步电机启动控制系统结构框图。

图4 无轴承永磁同步电机启动系统结构框图Fig.4 The configuration diagram of starting control system on bearingless PMSM
5 仿真和实验研究
仿真分析通过Matlab实现,利用m语言模拟电机启动转子定位过程,假定转子初始位置角(空间电角度)为 50°,误差容限为0.01°。对应的转子空间位置角和搜索次数关系曲线如图5所示。由图5可以看出经过11次搜索,电机转子完成初始定位。
图6给出了电机转速n=400 r/min时U,V相的线电压波形。从图6中可以看出,采用转子磁场定向控制,无轴承永磁同步电机在完成转子精确定位后能稳定运行(悬浮力绕组未通电)。

图5 转子空间电角度和搜索次数关系图Fig.5 T he relationship between space electric deg ree of rotor and search times

图6 实验波形Fig.6 Experimental waveform
6 结论
本文通过转子初始位置粗测和二分搜索法完成对无轴承永磁同步电机转子的精确定位后,采用转子磁场定向控制方法完成电机的启动。仿真和实验结果表明,该启动方法能够保证无轴承永磁同步电机快速启动,并进入稳定运行状态,为电机的悬浮运行奠定了良好的基础。
[1] Ertucrul N,Acarnley P.A New Algorithm for Sensorless Operation of Permanent Mag net Motors[J].IEEE T rans.on Industry Applications,1994,30(1):126-133.
[2] 郭熠.永磁同步电动机转子初始位置检测方法[J].微电机,2004,34(5):12-14.
[3] 苏奎峰,蔡昭权,吕强,等.TMS320X281x DSP应用系统设计[M].北京:北京航空航天大学出版社,2008.
[4] 陈伯时.电力拖动自动控制系统:运动控制系统[M].第 3版.北京:机械工业出版社,2003.
[5] 张军,林家泉,王旭,等.矢量控制永磁同步交流伺服电动机初始磁极位置搜索方法[J].控制与检测,2006,8(4):63-66.
[6] Jung D h,Ha I J.An Efficient Method for Identifying the Initial Position of a PMSM with an Incremental Encoder[J].IEEE Trans.on Industrial Electronics,1998,45(4):682-685.
[7] Ooshima M,Chiba A,Fukao T.Characteristics of a Permanent Magnet Type Bearingless M otor[J].IEEE T rans.on Industry Application,1996,32(2):363-370.
修改稿日期:2010-08-27
猜你喜欢
上海大中型电机(2021年2期)2021-07-21 03:01:32
防爆电机(2020年6期)2020-12-14 07:16:54
电子制作(2017年1期)2017-05-17 03:54:12
光学精密工程(2016年3期)2016-11-07 09:03:49
照明工程学报(2016年3期)2016-06-01 12:18:01
电测与仪表(2016年2期)2016-04-12 00:24:42
云南电力技术(2015年2期)2015-08-23 01:31:52
大电机技术(2015年5期)2015-02-27 08:22:28
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54
汽车电器(2014年8期)2014-02-28 12:14:29