
高速摄像结合虚拟仪器测量振动及其AVD方法研究*
2011-04-26 05:08宋玉珍刘新程
舰船电子工程 2011年1期
刘 炼 宋玉珍 刘新程
(91550部队91分队1) 大连 116023)(91913部队30分队2) 旅顺 116041)
1 引言
任何一个力学系统在工作时都有可能发生振动,尤其是武器发射瞬间对整个发射系统造成的振动。通过获得发射装置在发射过程中的振动特征参数及相关物理量随时间的变化规律,为检验和改进武备系统的设计、为全武器系统的最后定型提供必要的依据。而当前所使用的测量和分析方法主要是力学测量与分析方法,这种方法测量系统庞大,数据分析效率低下,甚至有时会损坏传感器。所以,提出一种基于虚拟仪器的高效、高精度的测量与分析方法,在物理通道的基础上增加若干虚拟通道,即对信号扩展一次积分通道、二次积分通道、一次微分通道和二次微分通道。定义虚拟通道之后,就可以实现在采样时,不仅记录了物理通道中的各路数据,同时还得到虚拟通道中定义的信号,采样结束后就同时保存了原始信号和虚拟通道信号,相比采集后处理的方式,极大地提高了效率。结合虚拟仪器和全程微积分技术,使加速度(A)、速度(V)和位移(D)三个基本参量(本文简称AVD值)三测量的实现成为可能。过去某一个传感器只能获得其中一个信号,需要采样后处理才能获得ACD值,若对该路扩展适当的微分和积分虚拟通道,就可以额外获得AVD三测量功能:即只使用一个传感器,只占用一路采集通道,还可以同时获得加速度(A)、速度(V)和位移(D)三路信号。这种测量方法具有广阔前景和深远意义。
2 系统组成
计算机振动测量分析系统[1]主要由待测物体部分、光学成像部分、数据传输部分、虚拟仪器、分析部分和结果输出部分构成。其具体结构如图1所示。
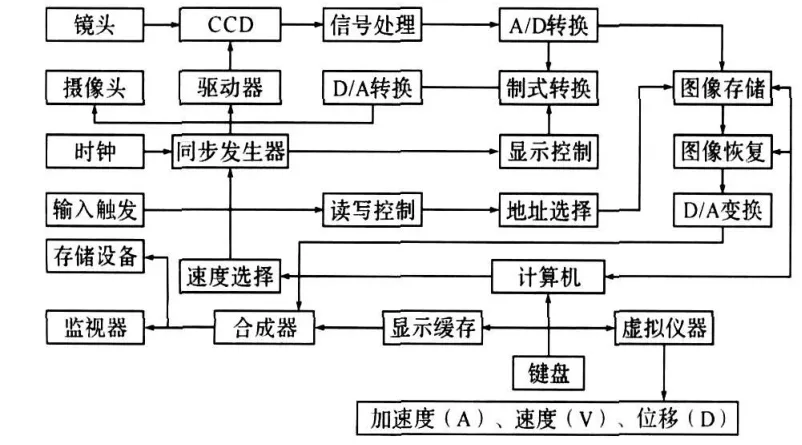
图1 高速摄像系统结构框图
3 硬件构成
3.1 摄像系统
摄像系统[2]包括变焦距镜头、CCD摄像机(包括CCD芯片、驱动电路和信息处理电路等)、寻像器和固定装置。
选用美国EG&G公司的RA25678N芯片作为图像传感器。RA25678N是一种MOS高速固体图像传感器阵列,也称为“自扫描光电二极管阵列”,简称SSPD,SSPD除具有CCD的特点外,还具有抗弥散性好、暗电流小、实际感光面积大等优点,并避免了CCD在电荷转移过程中产生的不良影响。
其主要技术指标为:
1)画幅频率:500帧/s
2)像元数:256×256
3)像元中心距:40μ m
4)像元感光面积:800μ m2
5)动态范围:300:1
6)感光灵敏度:5.768V/μ j/cm
7)平均暗电流:2%
8)等效时钟频率:40MHz
9)有效感光面积:10.24mm×10.24mm
这种芯片在水平方向每32个像元分成一组,整个芯片共分成八组,由八个输出端口同时分别输出,其中四个输出端口输出偶数序列像元信号,另四个输出端口输出奇数序列像元信号。
CCD摄像管是电荷耦合器件,在硅片上集成了以阵列分布的成像单元及相应的控制电路、输出电路。当有一束平行光照射到镜头上时,所有的成像单元处于导通状态,输出的图象为全亮平面(图2(a));当有一个U形物体挡在镜头前方时,由于部分光线被挡住,导致部分成像单元处于截止状态。所以输出图象就会形成一个U形的阴影(图2(b))。当物体振动时。在任何时刻物体的形态都被以这种方式记录下来了。光电三极管分布越密,分辨率就越高。
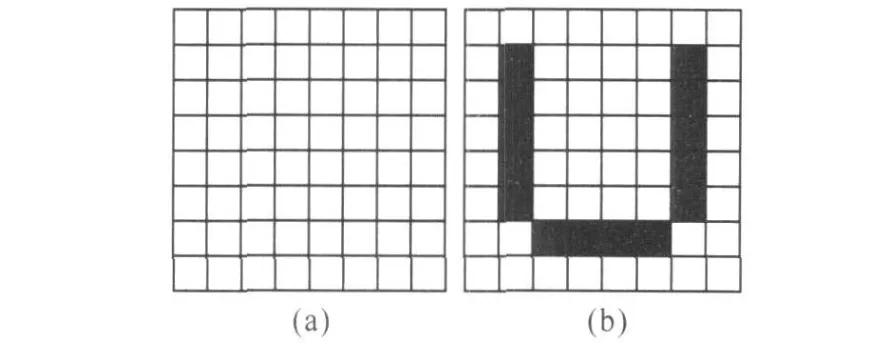
图2 CCD摄像头成像原理
3.2 主机
主机包括计算机、大容量图像存储器、监视器、键盘和其它接口与控制单元。
系统的存储容量至少为2000帧全幅图像数据,每帧图像数据按64Kbit×8计,即 512Kbit,数据总量达1Gbit,如此大的存储量需要大容量的存储设备。
4 软件构成
4.1 预处理过程
4.1.1 动态分块滤波算法
由于从摄像机传送过来的数据是物体及其周围环境的真实反映[3],所以存在着各种外在的干扰。即使在实验中尽量改善测量环境,如让与待分析振动无关的物体(如支撑物等)不要进入图像,增加光线照射的强度,来减少物体自身投影的影响。但是有用信号中混有的干扰信号总是无法完全消除的。因此,在对原始图像进行识别处理之前,必须将上述的干扰因素排除,也就是要先对原始采样信号进行滤波。由于干扰信号的存在具有随机性,所以本系统设计了“动态分区滤波”的方法来进行处理。该方法的具体算法如下:第一步,将整个图像区用十字形划分为四块 B1、B2、B3和B4,如图 3所示。
然后通过下面的公式求出每块的平均灰度值H1、H2、H3和 H4。其中 H 的上标(0)代表第零次分区,以下上标意义与此相同。
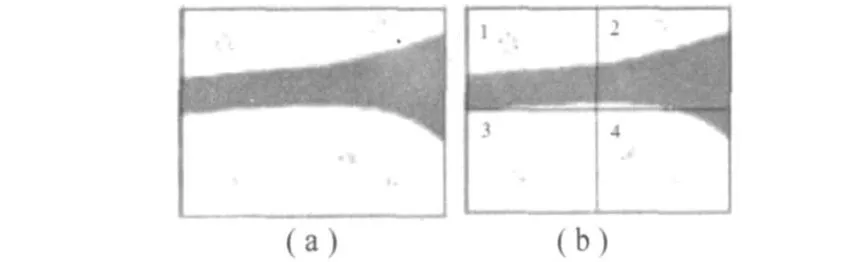
图3 动态分区滤波第一步

再将每一个分块按上述方法分成四等份B11、B12、B13和B14,这样就把噪音信号进行“分而滤之”的处理,如图4所示。
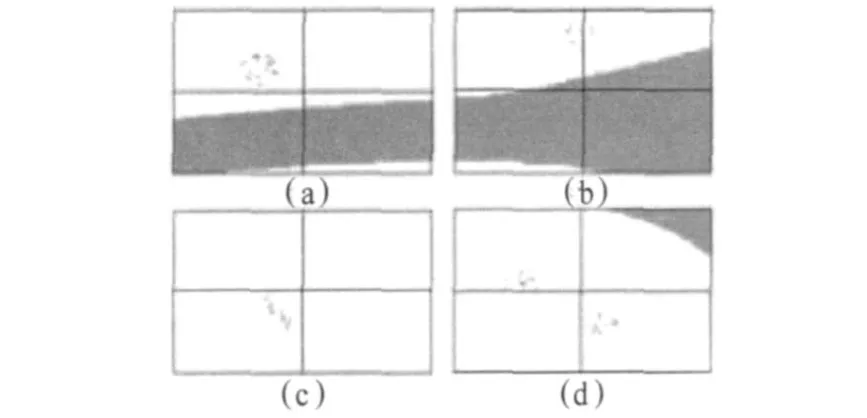
图4 动态分区滤波第二步
然后将这四个灰度值和母分区灰度值H1作比较,定义如下控制量:

可以重复以上的步骤,直到控制量δ小于某一指定值,可以认为在此时的每一小块中所出现的灰度值奇异点为干扰信号。这样,就能用当前的块灰度平均值代替块中的各点灰度值。从而也就到达了滤去噪音信号的目的。
4.1.2 二值化算法
滤波以后,就可以对图像进行二值化处理了。二值化算法[4]的核心在于如何获得一个良好的灰度阈值,使得图像的二值化处理能达到最佳效果。如果该阈值选得过亮,那么图像就会在物体本身之外产生许多黑斑,达不到分辨的目的;如果该阈值选得过暗,又会使待测物体的外形变小,导致数据失真。为了对图像进行更好的提取,必须选择一个较好的阈值自动选择算法。在计算机显示器上,每个像素的颜色有R,G,B三部分构成,当R=G=B=255时,该点为白色,也就是对应为亮点;当R=G=B=0时该点为黑色,也就是对应为暗点。由于图像是黑白的,所以对于同一点,其R,G,B的值大致相同,首先将屏幕上每个像素的R值读到一个二维矩阵R[i][j]中,如果实验背景选定为白色,而且已经对图像进行了滤波处理,因此得到的图像点的R值的分布应该是在振动物体的位置上有个突起的峰(谷),而其他位置上变化应该很平滑。所以通过对这i×j个值求平均值得到Ravi作为原始阈值是具有分辨能力的。通过实验,在此阈值控制下,图像的二值化效果一般能够满足要求。为了进行弥补,系统另外设置了人工控制的模式。也就是在阈值附近通过手动控件进行调整,并随时监控图像处理的结果,直到满意为止。
4.1.3 图像线化处理算法
该算法的主要目的就是从图像中提取到可以进行后处理的数据[5]。首先按列找到二值化处理后图像的阴影上、下边沿,按着两个边沿数据求一个平均值Yavi[i]。将这些值看成是一维振动结构的中心线,在忽略物体材料的微小不均匀性的情况下,该曲线的形态就能认为是物体的振动形态。如图5所示。
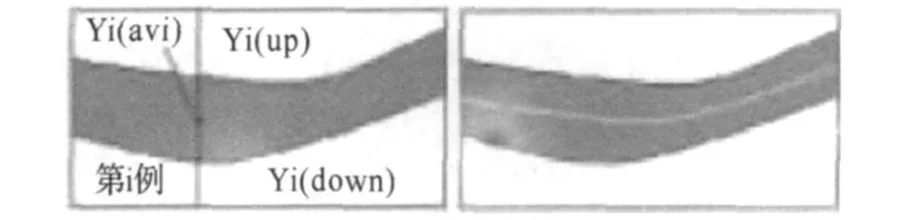
图5 图像线化处理示例
将这些数据存储到文件中,准备进行参数求解和分析。由于显示器的最小单位是像素,所以在求取Yi(avi)时必须用整型数据进行运算。这样在所得到的中心线上会出现一些不光滑的地方。对此系统将数据读到分析模块中时,采用了线性插值和二次曲线插值的方法来进行平滑处理,获得了良好的效果。
4.1.4 虚拟扩展通道
本文的虚拟仪器[6]采用DASP智能数据采集和信号处理系统,通道设置如图6所示,上半部为采集器的物理参数设置,下半部是虚拟通道参数设置[7]。
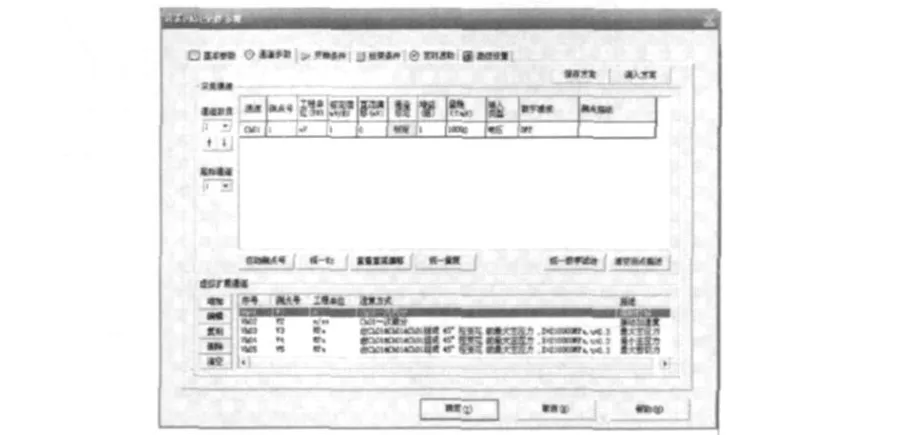
图6 物理通道和虚拟通道设置
4.1.5 振动参数频谱分析
通过上述各步骤的图像处理工作,以图6为例可以获得结构(如横梁)上的任意点的X(k)采样函数。参数分析的基本算法[8]就是对X(k)进行离散傅立叶变换,并在频域内进行分析处理。通过对幅值/相位图的分析,就能得到各阶振型的频率和其它所需要的各种参数。
采用虚拟微积分通道还具有不受信号端点截断的影响,因为采集仪得到的信号是连续的。若采用采集后再进行微积分转换,则可能在数字信号两端出现严重的波形畸变现象。
需要说明的是,基于梯形法等的传统微积分运算方法,对长时间的连续振动信号具有难以克服的缺点,积分操作易受信号基线和低频漂移的影响导致积分后波形基线的大幅波动,微分操作则易受信号局部噪声的影响导致微分后波形噪声比较大。因此在AVD三测量中,对长时间连续振动波形需要采取考虑波形全程特性的微积分运算手段,才能保证获得理想的微积分虚拟通道信号。
5 对系统的实验室验证
试件采用图7所示的一维振动结构,其具体结构如图7所示。
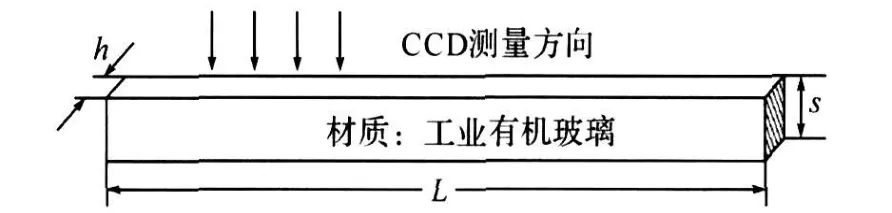
图7 待测结构说明
用本系统对其振型作了测量和分析。所使用的待测物体的材料为有机玻璃,总长为110cm宽度为5cm厚度为0.4cm,摄像头垂直照射在厚度方向上。将摄像系统的采集速度设为24幅/秒,在该试件上加上两个质量适当的砝码作为配重来控制振动频率。根据振动理论,如果改变配重 M1和M2的质量,或者改变长度a和b的值(见图7)都会引起各阶振型所对应的频率发生移动。因此,在改变这些参数的条件下进行了大量的数据采集与分析实验。选取了两张有代表性的频谱曲线进行比较。如图8、图9所示。
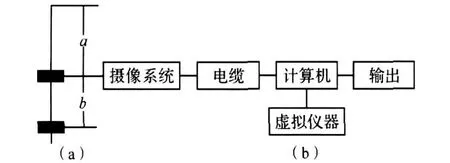
图8 高速摄像系统结构框图
在图9(a)、(b)两张频谱图上,可以清晰地看到一阶振型和二阶振型所对应的频率发生了移动。而且经过计算可以发现两张图上频率比值也发生了变化。这正是由于改变了配重 M1和 M2在待测物体上的位置,根据振动理论,必然会发生这种现象。由此也就间接地证明了本系统的可用性。再通过建立初步数学模型计算出的AVD值与虚拟通道记录的AVD值相比较,数值基本一致。

图9 待测结构振动频谱分析曲线图
6 系统应用及可能遇到的问题
本系统为达到精确、高效的目的。以一种车载武器发射装置为例,测量发射系统的水平、垂直和射向三个方向的一维振动量(如图10)就可获得该发射系统的特征值和AVD值。
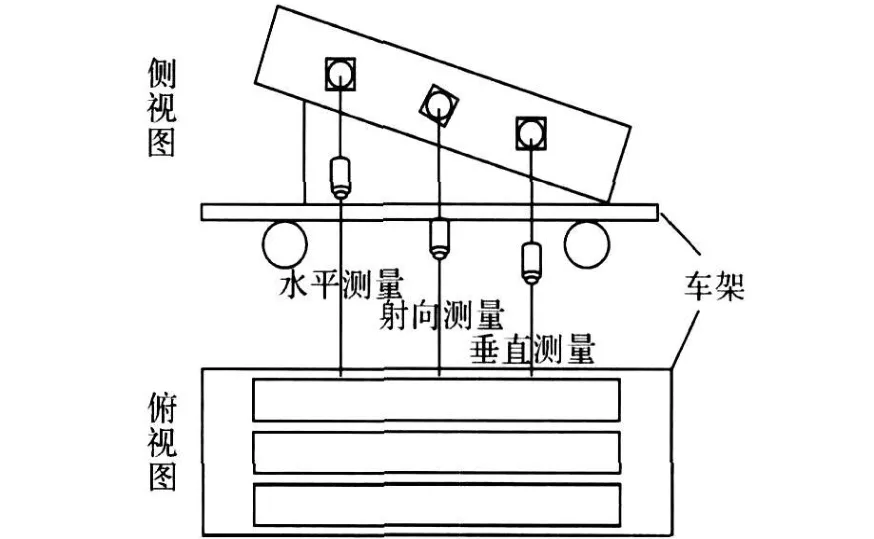
图10 摄像头位置图
仍存在一些可能影响测量结果的问题:
1)摄像系统测量时的固定位置选择;
2)日光、背景对摄像系统的影响;
3)发射时,尾焰的热和光对摄像系统的影响;
4)发射瞬间,气流对摄像系统的冲击;
5)发射时,烟尘对摄像系统的影响。
针对以上问题,可采用以下办法解决或减少影响程度:
(1)摄像系统摄像头固定在测量点2~4m的地方,以远离气流冲击和看清目标点为标准;
(2)摄像头处加装遮光装置减少日光和发射时火光、烟尘影响;
(3)在发射装置后面装气流导向板,减少气流对摄像头的冲击。
[1]张三喜,姚敏,孙卫平.高速摄像及其应用技术[M].北京:国防工业出版社,2006
[2]徐青,张艳,耿则勋.遥感影像融合与分辨率增强技术[M].北京:科学出版社,2007
[3]沈凤池.图形图像处理技术[M].北京:人民邮电出版社,2006
[4]应怀樵.现代振动与噪声技术[M].北京:航空工业出版社,2008
[5]贾永红.数字图像处理[M].武汉:武汉大学出版社,2003
[6]刘进明,应怀樵.虚拟扩展通道采样技术[M].北京:北京东方振动和噪声技术研究所,2008
[7]应怀樵.DASP-V10操作使用手册[M].北京:北京东方振动和噪声技术研究所,2008
[8]谢官模.振动力学[M].北京:国防工业出版社,2007
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
建材发展导向(2021年19期)2021-12-06
天津医科大学学报(2021年1期)2021-01-26
临床骨科杂志(2020年1期)2020-12-12
中国信息技术教育(2020年2期)2020-02-02
电子制作(2018年16期)2018-09-26
火控雷达技术(2016年3期)2016-02-06
探测与控制学报(2015年4期)2015-12-15
海军航空大学学报(2015年1期)2015-11-11
空间控制技术与应用(2015年3期)2015-06-05
