
模糊控制在纠偏控制系统中的应用
2011-04-20 07:27:52徐耀良赵万剑杨宁王博张少成
上海电力大学学报 2011年6期
徐耀良,赵万剑,杨宁,王博,张少成
(上海电力学院电力与自动化工程学院,上海 200090)
模糊控制系统由于具备易于接受、设计简单、维护方便等优点,而且比常规控制系统稳定性好、鲁棒性高,因此得到越来越广泛的应用.同时,模糊控制对解决在非线性高速运动状态下的对象具有良好的控制效果.
而纠偏控制器的被控对象即卷材,在工作状况下速度极快,一般在3.5 m/s以上,本文将模糊控制应用于纠偏控制系统中,以提高纠偏控制系统的纠偏精度[1,2].
1 系统工作原理
基于模糊控制的纠偏控制系统包括以下4个部分:一是被控对象,即卷材,卷材在高速运行状况下,受到不可控制力的作用,不能保持直线运行而使其幅宽中心线偏离基准中心线;二是颜色传感器,内部集成了可配置的硅光电二极管阵列和一个电流/频率转换器,可完成高分辨率的光照度/频率转换,可直接与微处理器通讯[3].本装置采用颜色传感器TCS230;三是模糊控制器,包括定义变量、模糊化处理、模糊控制规则、逻辑判断和解模糊化5个部分,本文模糊控制器选用的单片机是C8051F023芯片;四是执行机构,其最大速度为28 mm/s.
整个纠偏控制过程是通过单片机对颜色传感器进行采样,并将采样数据处理后模糊化,解析被控对象的相对偏差,查询模糊控制规则表,选择相应的控制策略,送至执行机构驱动电机实现的.
基于模糊控制的纠偏控制系统原理示意如图1所示.
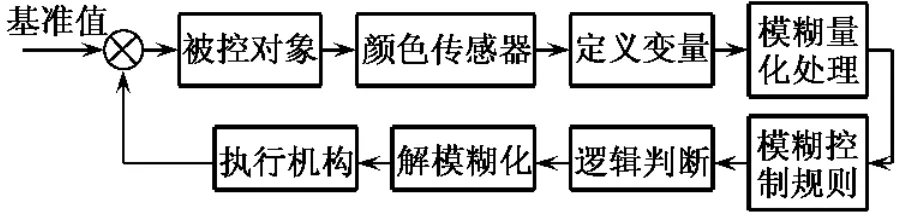
图1 基于模糊控制的纠偏控制系统原理
2 软件设计
纠偏控制系统主要完成检边和检线两方面的纠偏控制.
2.1 检边程序设计
2.1.1 一维模糊控制设计
检边控制是通过检测两种颜色分界线的相对位置偏差进行控制的,用于实现颜色分界线在精度范围内微小变动的控制.检边程序根据不同颜色反射给传感器的光强不同,以黑白两种颜色进行设计.
因此,对于检边控制来说,颜色分界线处在传感器检测区域的位置不同,其输出频率也不同,单个颜色传感器即可完成检边控制,其模型如图2所示,其中内置正方形代表颜色传感器.

图2 被控对象模型
由图2可知,纠偏控制系统工作时,当被控对象偏离基准中心,颜色传感器所检测到的不同颜色的面积发生变化.TCS230颜色传感器在不同颜色下的输出频率值是不同的,它们之间存在一定关系.采用脉宽采集法采集不同背景色的信号,即用定时器记录一次脉冲高电平宽度作为采样值.
为得到传感器在不同颜色下与其输出频率之间的关系,进行以下实验.首先,将传感器置于全白色背景下,如图2a所示,启动纠偏控制器的执行机构带动背景颜色分界线向传感器移动,直至传感器处于全黑色背景下,如图2c所示.同时,将采集到的数据通过串口送至上位机,使用Matlab工具箱进行曲线绘制,结果如图3所示.整个系统的控制周期为5 ms,即传感器5 ms采集一次数据,所以系统的采样频率为200 Hz.
从图3可以看出,传感器在全白色背景下,采样值稳定在20μs,全黑背景下采样值接近110 μs,则黑白色采样值相对变化量为90μs.在采集过程中,纠偏控制器的电机匀速前进,则可认为采样值近似线性变化.同时,采样值从最小值到最大值约需40次采样,时间为0.2 s.根据实测电机速度为24 mm/s,可计算出TCS230颜色传感器的有效检测范围为4.8 mm.图3中采样值虽已经过滤波处理,但仍然存在极少跳码现象,这是由于TCS230传感器对外界环境非常敏感,符合实际工况.
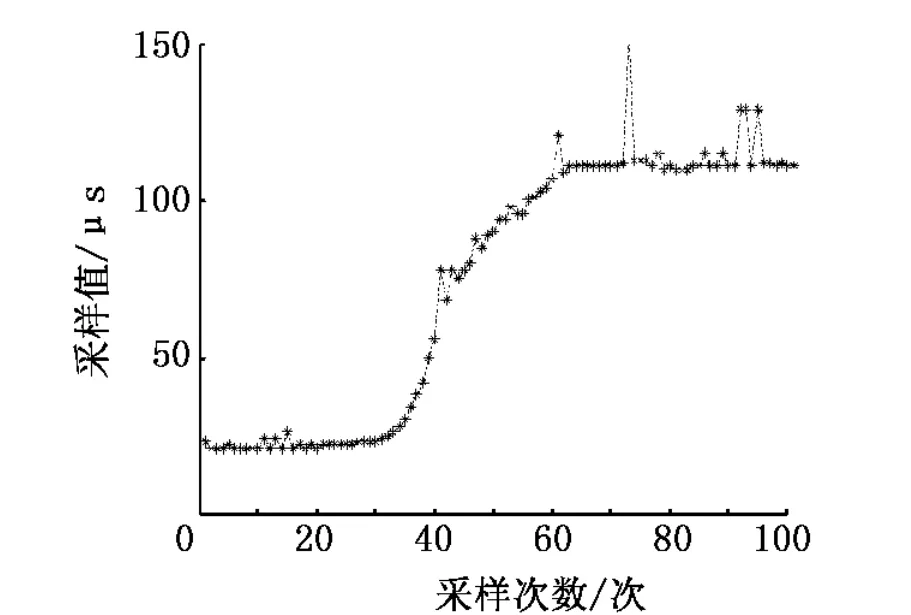
图3 检边实验状态下采样值变化趋势
从实验中可得出结论:在一定区域内,分界线相对传感器的位移变化量与传感器输出频率成正比.根据上述结论,在线性区域内任意选取中间一点作为基准值Xbase,对于任意一点采样值x,可以得到其坐标值y:

式中:S——灵敏度调整量.
通过调整S值可以调整坐标量相对于偏差量的疏密程度,即能调节整个控制系统的灵敏度.考虑到电机在中心位置频繁变向运行从而导致电机寿命降低的状况,需在基准中心设定一定死区值Δx,可用逻辑伪代码表示为:

以上程序设计包括了对被控对象左右位置偏差的校正,这就完成了对输入变量的定义和模糊化.取误差变量坐标模糊子集的论域为:

其中,pos=0代表中心位置.之所以选择误差变量坐标论域为11,是基于大量的实验基础.当论域较小时,执行机构会在偏差较大的情况下才开始动作,控制效果不够理想,纠偏精度不高.当论域超过11时,纠偏精度就不再明显提高,更大的论域会使得在查询整个模糊控制表时花费较多时间,有可能引起控制的滞后.同时,由于机械惯性,当论域很大时,也较容易产生不必要的误动作.因此,综合考虑纠偏控制系统的速度、机械惯性、滞后性等情况,选取误差变量坐标模糊子集的论域为11.
在设计软件程序时,为了消除负数所引起的不必要错误,对式(5)所有的值自加5,得到:

其中,pos=5代表中心位置.
完成变量定义并模糊化后,就需要建立模糊规则库和逻辑判断以控制执行机构即直流电机的运行方向和速度.本设计采用了LMD18245电流控制驱动芯片,根据单片机上不同的引脚可以设置电机的方向和速度.
为避免复杂的数据处理,将控制电机的速度、方向及刹车用一个8位变量的相应位来表示,将不同的控制方式有规则地置于控制数组中,程序设计如下:


其中,M0~M3为电机速度二进制编码,编码1111为执行机构最大速度,0000为电机停止,MDRT为电机左右方向位,MBRK为电机刹车位.经过反复实验测试,建立一维模糊控制规则库为: fuzzy[11]={0f,0d,0b,08,04,20,14,18,1b,1d,1f},控制规则库中参数以16进制显示.偏离基准中心越远,电机速度越快.调用命令command= fuzzy[pos],即可实现根据偏差位置选择执行机构的速度,达到实时高精度纠偏.
2.1.2 PD一维模糊控制设计
纠偏控制器的系统响应时间是决定系统纠偏精度的关键因素,为提高系统在高速运行状态的响应速度,根据经典PID控制理论,在不提高电机运行速度的前提下,数据处理时加入微分算法,通过调整比例系数和微分系数可提高系统的响应速度.同时,根据被控对象传递函数G(S)=(K/S)· 1/(TS+1)(T<<1),因此基于一维模糊控制算法加入PD控制算法后为:

在不考虑死区范围的情况下,输入输出关系为:

令当前偏移量e=x-Xbase,上次偏移量eold= xold-Xbase,式(8)可转化为:

最终能够直接对电机进行控制的y坐标量与传感器输入采样值之间的函数关系,经过一系列数学推导后转化为经典PD算法表达式,形如式(10).
当外界条件不变时,根据经典控制理论,增大比例系数kp或微分系数kd,会加快系统的响应速度,提高系统的快速性,但当kp或kd系数过大时,系统会产生振荡[4].因此,在不同的控制精度要求下,适当调节各个参数,对纠偏系统的控制效果有非常明显的作用,满足实际工况需求.
将处理后的输出值y代入式(2)~式(4),取与一维模糊控制算法相同误差变量坐标模糊子集和控制规则库,完成PD一维模糊控制.
2.1.3 PD二维模糊控制设计
PD二维模糊控制在解决非线性对象时具有很好的控制效果[5,6],因此根据PD一维模糊控制设计得到当前位置pos,同时程序设计时记录上一次位置old-pos,经过大量的实验测试和调试后,可得到较为完整的二维模糊控制表,见表1.

表1 二维模糊控制规则库
当偏离基准中心越远或位置偏差较大时,输出控制量越大.程序编写时,只要调用命令command=fuzzy1[pos][old_pos]即可.
2.2 检线程序设计
相比于检边控制,检线控制要复杂一些.由于一般检线控制背景色上的引导线宽度在0.5~2 mm,对传感器的输出变化较小,当线的宽度远小于传感器检测区域宽度时,在某些位置传感器输出不发生变化,因而从单一传感器数据上无法完整判断外界引线变化.因此,要用数个传感器组合判断.经过多次测试实验,最终选用两个传感器交错布局方式,其模型如图4所示.

图4 检线控制模型
为定量观察引线在传感器不同位置的采样值,采用与检边控制数据采样类似的方法.1 mm宽的黑线白色背景下,电机启动黑线从左往右经过传感器,并将采样数据发送至上位机,在上位机用Matlab绘制曲线,如图5所示.

图5 检线实验状态下采样值变化趋势
由图5可知,传感器在第100次采样时,两传感器采样值相等,即图5a中的A点,在A点附近总是一个传感器采样值上升,另一个传感器采样值下降,由此可用两传感器之差来表示在BC之间传感器数据与相对位移的关系,如图5b所示,而在BC线性区域内可套用检边控制的方法.在BC之外通过一个传感器数据不变而另一传感器数据变小这两个条件判断,可直接使电机保持原来的运行方向来防止系统失控.
3 实验测试与分析
不同控制规则下的采样值输出曲线见图6.

图6 不同规则控制效果
实验测试仅以检边为例,其中电机速度为24 mm/s,卷材运行速度为3.5 m/s,误差率为18 mm/s.由图6可知,采样值偏离基准中心的最大值从使用简单一维模糊控制效果下的25μs减小到PD二维模糊控制下的8μs.经实际测量,系统的最高纠偏精度从常规控制效果下的±0.3 mm提高到±0.1 mm.
4 结语
本文从简单的一维模糊控制入手,综合考虑系统响应速度和被控对象传递函数,设计了PD二维模糊控制.经实验测试,系统的纠偏精度提高了±0.2 mm.本系统也为纠偏控制器中使用模糊控制的进一步研究提供了参考.
[1]尹洁.凸型印刷系统中控制器的研制[D].上海:上海大学,2007.
[2]杨开平,史耀耀,何晓东,等.复合材料带缠绕智能纠偏控制技术[J].航空学报,2011,32(7):1 318-1 325.
[3]陆徐平,徐耀良,李渝曾.基于TCS230的新型双路颜色传感器的研制[J].电子技术应用,2007,33(8):89-91.
[4]邵诚,董希文,王晓芳.变论域模糊控制器伸缩因子的选择方式[J].信息与控制,2010,39(5):536-541.
[5]王宁,孟宪尧.两维最简模糊控制器结构分析[J].信息与控制,2008,37(1):34-39.
[6]杨劲松.自适应模糊控制技术在铝塑板剪切生产线中的实现[J].测控技术,2010,29(7):49-53.
(编辑苏娟)
猜你喜欢
成都信息工程大学学报(2021年6期)2021-02-12 03:00:52
机电工程技术(2018年10期)2018-12-06 02:26:38
测控技术(2018年10期)2018-11-25 09:35:52
西南交通大学学报(2016年3期)2016-06-15 20:29:35
广东石油化工学院学报(2016年3期)2016-05-17 05:17:10
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年5期)2016-03-22 01:09:57
电源技术(2016年2期)2016-02-27 09:04:56
电源技术(2015年11期)2015-08-22 08:50:38
