
H y p a c k软件在布放深水潜标中的应用
2011-04-20 08:28:10中国科学院海洋研究所张志平顾秋青青岛大学
世界海运 2011年8期
中国科学院海洋研究所 张志平 顾秋青青岛大学 李 超
随着现代海洋调查技术的不断提高和调查手段的不断发展,潜标的系统调查由近岸走向大洋,并已经成为深海大洋重要的调查方式,潜标的布放深度由几十米延伸到几千米。深海潜标的布放和浅水潜标类似,均采用先标后锚的步骤和单锚绷紧的锚泊方式,即先把主浮球投放入海,使其漂浮在水面上,再把各种调查仪器按预定的次序和深度随锚系的缆绳投放到海面,最后将锚碇重块投放入海,锚碇重块触底后趋于稳定[1]。利用重块的重量将主浮球和整个锚系拉至水面以下设计的深度,利用浮球的剩余浮力将锚系缆绳拉紧,进行连续不断的观察工作,为深海科学研究提供可靠的数据。这就要求在潜标的设计上必须考虑布放环境和布放回收作业的各种要求,由于水较深,需要布放的缆绳较长,多数仪器设备需现场安装;因此,船舶布放作业的时间也较长,船舶随风流漂移的距离较长,加上周围水深变化较为复杂,所以解决锚碇重块的投放点或者落地点的准确位置成为布放工作的难点。为保证准确地将锚碇重块按计划的位置和时间投出,必须在整个布放过程中根据现场的风流变化对船舶运动轨迹不断调整并加以严格控制[2]。
Hypack软件是一款集定位导航、单/多波束水深数据采集等多功能于一体的导航与水文工程软件[3]。其主程序用于完成设定工作环境、预设各类参数、预置导航点与测线等工作。其实时导航程序由主程序(Survey)调用,用于实时显示导航、测深等现场调查数据并可同步记录这些数据。使用Hypack软件协助可以直观、实时地看到船舶轨迹和位置,并能根据其图像和提供的导航参数,对船舶的运动趋势进行正确判断,进而通过车和舵对船舶运动加以干预,使船舶沿着理想的轨迹运动。实践证明,Hypack软件可布放潜标、设计航路,是一款非常实用的软件。
一、Hypack软件使用方法
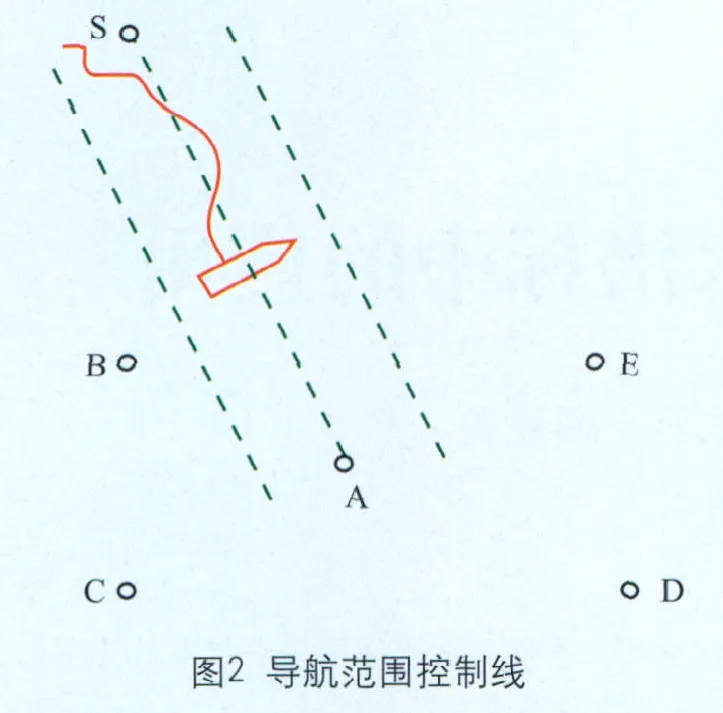
使用该软件进行海上布放深水潜标的方法是:在Hypack主程序中,输入潜标重力锚投放点A的位置与投放范围控制点B、C、D、E的位置;根据现场的风流情况和本船的可使用动力情况,确定潜标布放起始点S的位置,应使此点处于投放点的上游、下风和船首迎风位置,距离大约为流致船舶漂移的距离。如图1所示,A点为计划投放点,S点为起始布放点。为了更清晰地帮助船舶布放潜标,SA为导航中心线,以SA线左右各一条与其间隔一定距离的一对SA线的平行线作为潜标布放时的导航范围控制线,如图2所示。在实施潜标布放时,可在Survey实时勘查程序中,结合实时显示的图形及相关导航参数,为船舶操纵提供更有力的依据,通过操纵让船舶沿着控制线确定的范围运动。

二、Hypack软件具体操作步骤
1. 输入重力锚投放点、投放范围控制点的位置
(1)依次级选菜单项:“测量准备”“编辑器”“目标文件编辑器”。
(2)在“目标文件编辑器”窗口中,输入潜标重力锚投放点A与投放范围控制点B、C、D、E的名称及位置经纬度值。
2. 按要求找到并输入潜标布放作业起始点位置
根据潜标布放作业起始点S相对于潜标重力锚投放点A的距离、方位要求,确定S点的位置经纬度,并输入此点。
(1)恰当缩放主显示区显示比例,使A点处于显示区内,并留出下述操作所需空间。
(2)级选菜单:“视图”“缺省光标”。
(3)将鼠标移至A点,按住鼠标左键,根据距离、方位要求,参考状态栏中显示的“距离”“方位角”参数值,将鼠标拖曳至潜标布放作业的起始点处,记下状态栏中显示的鼠标光标当前所处位置的经纬度值。
(4)在“目标文件编辑器”中,输入潜标布放作业起始点S的名称及其经纬度值。
3. 输入潜标布放过程中的船行中心导航线及偏航范围控制线
采用平行线导航,输入潜标布放过程中的船行中心导航线及船舶偏航范围控制线。
(1)级选菜单:“测量准备”“编辑器”“测线编辑器”。
(2)在“测线编辑器”中,输入S点及A点的经纬度值,作为1#导航测线的起止点,此线即为潜标布放时的中心导航线。级选菜单为“测线”“偏移”等。
(3)在“选择偏移方式”对话框中,选择进入“平行线”标签页。在此页上的“中心线左侧线数”“中心线右侧线数”两项后的输入栏内分别输入数字1,在“线间距”项后的输入栏内输入以上两线与中心导航线间的距离值。这样,按一定的间距在中心导航线的两边各生成了一条偏航控制参考线。两条控制线之间的区域称为布放潜标时的航道。
在完成潜标重力锚投放点、潜标重力锚投放范围控制点、潜标布放过程船行中心导航线、潜标布放过程船舶偏航范围控制参考线等诸项设置后,从Hypack主程序调用Survey实时导航程序,即可实时显示船舶与各控制参考点、线之间的相对位置图,再结合导航参数,可为船舶操纵提供各种重要的信息。
三、布放实例
2010年在西太航次海上布放6000m深海潜标,采取利用Hypack软件协助导航。当时环境情况如下:风向约070°,风速6m/s,流向180°,流速2kn,船舶随流漂移的轨迹向190°,速度2kn左右。根据船舶漂流轨迹,实际测得在船舶主机和舵的干预下的漂移速度(1kn)和方向(150°)决定船舶的起始布放位置。基于各种实测试验结果和预计布放时间(4h),拟定在预定投放点西北方向7km处开始布放。另外,考虑到需要一定空间余量以避免船舶漂过预定投放点,最终选择在预定投放点西北方向8km处开始布放,船首向为顶风方向。
在各种测量和准备工作完成后,船抵达S点前根据当时的风向070°将本船船首向调整至070°左右,同时将船停住,船速控制在2~3kn,且设定沿航道方向的漂移速度。船在就位的同时,甲板上的主浮球也由A型架使用释放钩吊放入海前作准备,位置一到迅速打开释放钩,让主浮球漂浮在海面上。在Hypack图上确认本船船位和船首向,此时如果位置不合适就作适当的调整,用舵和车慢慢向前修正船位和航向。调整时不要使锚系包括缆绳在内的任何部分受到磨损。不断重复车舵及调整风舷角、流舷角,进而调整船舶的漂移速度。在这些位置如同船舶靠泊时一样尽量将船调整至偏上风上流的位置,以便抵抗风流对船位漂移的影响。最后,根据实际布放位置的水深判断是否需要加调整缆绳,以保证整个锚系上的设备在设计的水深下工作。确定锚系缆绳的长度与计划符合后,将锚碇重块和释放器同样用释放钩吊放入海,迅速脱钩,脱钩后在锚碇重块的重力作用下,将整个锚系拉入水下。当重力锚入水后,每隔15min使用声学释放器甲板单元与潜标系统的声学释放器进行应答测距,同时记录作业船的GPS位置,利用作业船GPS位置、重力锚入水GPS位置、声学释放器测量斜距,计算声学释放器的下沉深度。
重力锚触底就位后,重块落到海底,整个系统在海里趋于稳定,在距重力锚入水位置5km范围内,进行至少4点以上声学释放器斜距测量,同时记录作业船的GPS位置,利用4组以上数据进行计算,确定潜标系统就位经纬度。
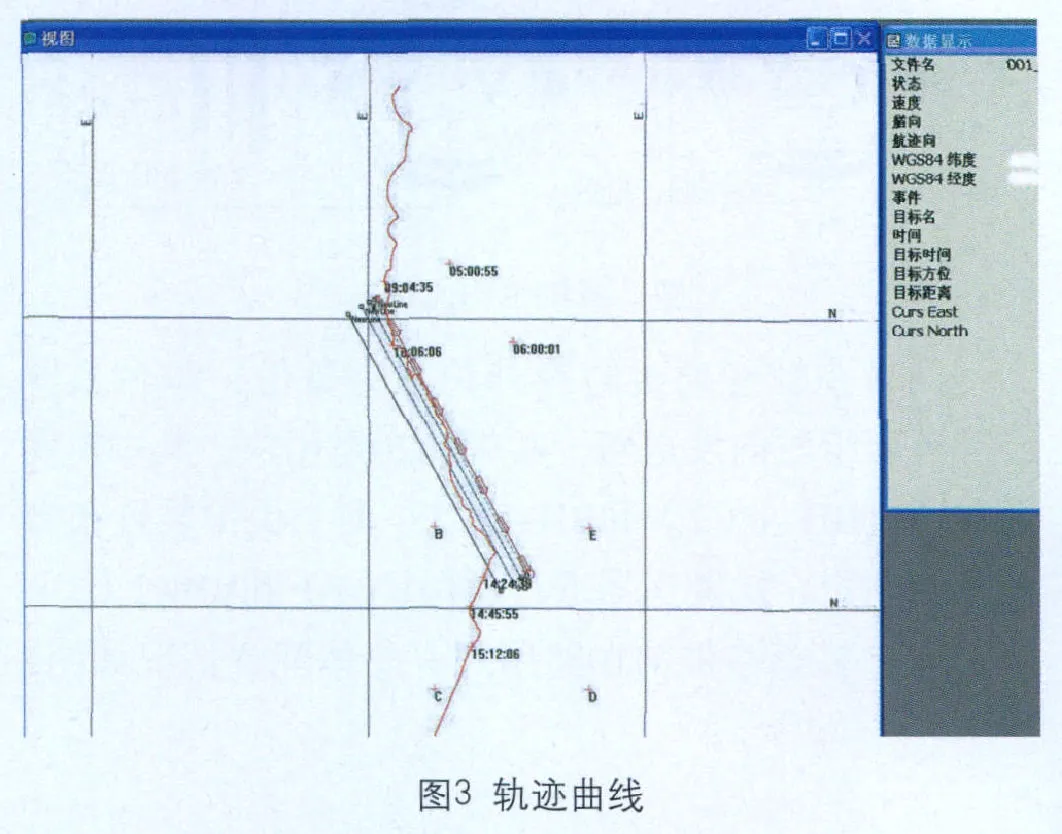
图3为实际海上布放轨迹截屏图的一部分,整个过程合理地利用了风和流的作用,有效地控制了布放过程的轨迹,实际布放的结果非常理想,投放点偏离布放点约6 0 0 m,符合布放前的设计要求。
四、结 语
在实际潜标布放操作中,主要通过调整船舶的风舷角和流舷角,充分利用舵和车的惯性,达到调整船舶漂移速度之目的。根据Hypack软件给出的各种信息,正确判断船舶的运动趋势,采取提前压舵和短时动车让船舶在模拟的航道内运动。
此外,在使用Hypack软件布放实施过程中,还需要注意以下几个问题:
(1)严密的分工协作,统一指挥,各负其责。
(2)潜标位置的确定,应选择海底相对平坦的地方,给潜标着底留有足够的余地。
(3)每次动车的时间应是短时的,将船速和首向控制在有效范围内。
(4)如需完全制动时可采取短时倒车,但无论如何不可让船后退。
(5)每次动车前应先将舵用到位置,方可起车,主要是利用车舵的惯性作用。
(6)对非机驾合一的船舶要考虑频繁起车及其启动性能。
(7)释放缆绳的速度不能过快或过慢,过快锚系易打结,过慢易磨损缆绳。
(8)使用Hypack软件时,屏幕比例要适当,要能清楚地看到船形。
(9)大部分的设备和仪器投放入海后,缆绳和仪器兜水的摩擦力很大,不能强拖。
(10)由于船速极低、舵效极差,船位可能会偏出控制区的航道,可以用车舵慢慢调整,但不要急于求成。
(11)对现场出现的紧急情况采取应变措施。
[1]毛祖松.海洋潜标技术的应用与发展[J].海洋测绘,2001(4):57-58.
[2]李飞权,张选明,张鹏.海洋潜标系统的设计和应用[J].海洋技术,2004(1):17-21.
[3]胡家赋,刘宇明.HYPACK导航系统在海洋资源勘探中的应用[J].海洋测绘,2003(6):21-23.
猜你喜欢
科教新报(2024年2期)2024-03-17 09:48:23
探索科学(学术版)(2020年7期)2021-01-13 03:39:26
科技视界(2019年26期)2019-11-26 08:52:23
党的生活·党员电教与远程教育(2019年1期)2019-03-06 12:41:42
铁道通信信号(2018年7期)2018-08-29 01:17:08
长江科学院院报(2017年5期)2017-05-18 08:20:41
发明与创新·中学生(2015年8期)2015-07-21 01:06:40
电子设计工程(2015年4期)2015-02-27 12:04:14
海洋科学(2014年12期)2014-12-15 03:35:04
声学技术(2014年2期)2014-06-21 06:59:04
