
火电单元机组无模型自适应控制方法研究
2011-04-10 02:23:08段峻,张磊
制造业自动化 2011年11期
段 峻,张 磊
DUAN Jun,ZHANG Lei
(陕西工业职业技术学院,咸阳 712100)
0 引言
火电单元机组控制系统回路主要有锅炉控制和汽轮机控制,具有纯滞后、大惯性和非线性的显著特点,其动态特性较为复杂。汽轮机控制回路通过输入信号完成对主蒸汽压力的调节,通过执行机构控制调节主蒸汽压力阀的开度,以改变汽轮机输出功率。锅炉控制回路通过输入信号控制锅炉的燃烧率,改变锅炉的出力,以适应负荷变化的需要。目前,对火电机组控制系统控制研究方法主要有:鲁棒控制、模糊多模型控制[1]、柔性控制[4]、神经网络自适应控制、自学习模糊控制等。这些方法虽然在一定条件下取得了较好的效果,但是他们主要局限于线性控制理论,且没有从本质上解决问题[2,3,5]。虽然也有一些智能控制方法在单元机组中有研究,但是智能解耦控制算法过于复杂,很难在工程中实现。
本文研究目的是解决火电单元机组控制系统的动态非线性,以及各个输入量相互之间的耦合特性,同时使系统具有较强的鲁棒性,锅炉汽包压力和系统功率输出具有良好的指令跟随性,以及较快的响应时间,提出了无模型自适应控制器。该控制器是侯忠生于1993-1994中提出的,其基本思想是利用一个新引入的伪梯度向量(或伪Jacohi矩阵)和伪阶数的概念,在受控系统轨线附近用一系列的动态线性时变模型(紧格式、偏格式、全格式线性化模型)来替代一般非线性系统,并仅用受控系统的I/O数据来在线估计系统的伪梯度向量,从而实现非线性系统的无模型自适应控制。
虽然这些方法主要还处在理论研究和仿真试验阶段上,在实际应用中还很少,但是他们为火电机组控制系统的研究提供了新的思路。
1 单元机组的动态特性
在锅炉燃烧正常(指送风量与燃料量相匹配;引风量和送风量相匹配)、给水正常(保持汽包水位在正常范围)和发电机励磁系统正常工作的前提下,单元机组可简化为一个具有强烈交叉影响的双输入双输出的被控对象,如图1所示。机组的能量流输出(功率NE)和机前压力PT为被控量,调节汽门开度指令信号µT和锅炉燃烧率指令信号µB为控制量。各个通道的时间常数和动态特性是不一样的,由µT到PT和NE的变化是相对快速的过程,而由µB到PT和NE的变化是相对慢速的过程。

图1 单元机组的功率汽压对象
对于汽包锅炉、凝汽再热式机组图1中所示的传递函数一般具有如下形式:

式中K1、T1分别为燃料变化到主汽压变化过程的增益与时间常数;K2、T2分别为燃料变化到功率变化过程的增益与时间常数;K3、K4、T3分别为调门变化到主汽压变化过程的增益与时间常数;K5、K6、T4、T5分别为调门变化到功率变化过程的增益与时间常数;τ为燃烧系统的纯迟延时间。各时间常数(T1~T5)和各增益系数(K1~K6)随负荷工况的不同而变化,呈非线性。锅炉系统动态特性的复杂性还在于:燃料种类(煤种)不同也将造成燃烧动态特性的差异,煤的燃烧过程由纯滞后环节和惯性环节组成,煤质差的情况下系统的惯性时间常数将加大;油和煤气燃烧迅速,几乎没有纯滞后环节,可看成只有一个惯性环节[5~7]。
本文以某300MW 燃煤直流炉再热机组为研究对象[8],它在100% 和70% 负荷工作点上得到的近似线性化数学模型分别为式(2)和式(3):
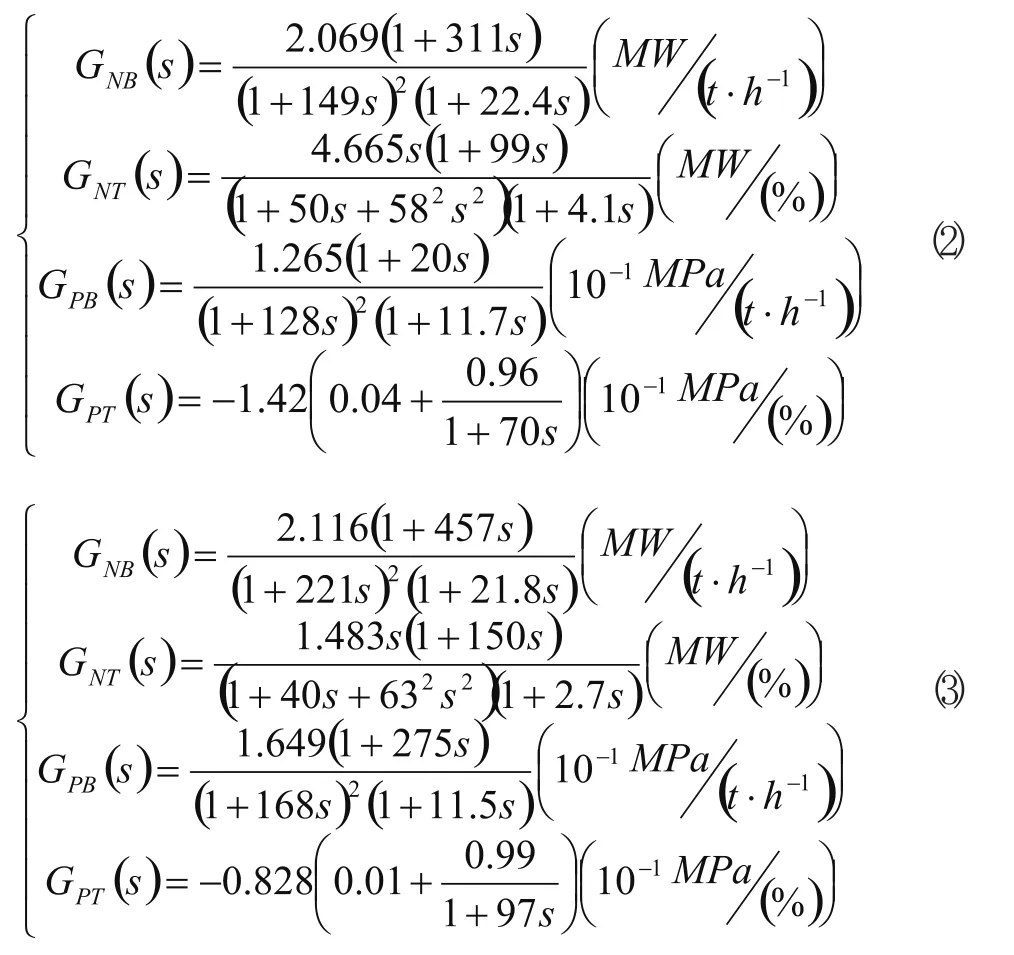
可见,这是一个具有严重时变、不确定性和耦合的多变量受控对象。协调控制系统应保证系统无论是在标称模型下还是在存在模型不确定性时均闭环稳定,并具有良好的输入输出特性,即机组能迅速适应电网负荷的变化,同时机前压力的变化不超出允许的范围。
2 单元机组协调系统的无模型自适应控制
2.1 无模型自适应控制算法
无模型控制器设计所依赖的是“泛模型”[9~11]

在这个模型中能够变化而实现自适应的部分仅仅是特征参量φ(k)。理论分析指出,当系统在设定值处处于稳定状态时,φ(k)事实上是y(k)关于u(k-1)的梯度,所以特征参量φ(k)在基本的无模型控制律:

1)输入和输出的信号分别通过微分-跟踪器Ⅰ和微分-跟踪器Ⅱ,得到信号经x1,x2,x3,x4,以此产生新的误差信号和微分e=x1-x3,ec=x2-x4作用于无模型自适应控制器(MFA)。

在无模型控制器基本算法的运行过程中,必须对特征参量进行在线实时估计。 实时估计需要依据泛模型。无模型控制律的基本算法就是由基于泛模型(4)对特征参量φ(k)的辨识算法和对被控对象的控制算法(5)在线交互进行而组成的。
4)把控制律式(5)作用于系统,得到新的输出y(k+1),于是得到一组新的数据可见φ(k)既代表了被控对象模型的参数,又是它的结构特征,所以称其为特征参量。特征参量φ(k)的估值是在线实时估计的。被控对象如果发生变化,其变化可用φ(k)的变化来描述。这样就实现了辨识与控制的一体化,同时特征参量的估值收敛到y(k)关于u(k+1)的梯度(导数)。
这样不断的重复1),2),3)和 4),就可以得到新的数据如此继续下去,系统的输出y(k)将逐渐地逼近。
2.2 单元机组协调系统仿真
一个有效的协调控制系统不仅与控制器的控制律算法有关,还与控制系统的结构有关。DEB协调控制系统的结构具有独到的优越性。因此,在DEB协调控制系统的基础上,保留其合理结构,应用无模型只适应控制技术进行改造,得出MFAC协调控制系统框图如图2所示。

图2 机炉协调无模型自适应控制系统结构
受控对象分别采用上述300MW火电机组在100%负荷和70%负荷点处的数学模型(2)和(3),而两通道MFAC的结构和参数均保持不变。在以下各图中,对100%负荷和70%负荷对象模型的仿真结果如图3示。

图3 火电机组在100%负荷时的无模型自适应仿真
由仿真结果可知,将N通道与P通道间的耦合大大削弱,在很大程度上实现了系统的解耦,保证了系统的控制品质。同时从图中可见,图3与图4仿真曲线几乎相似,即系统在不同负荷下的动态性能相差很小,充分显示出无模型自适应控制系统对受控对象模型的不确定性具有很好的适应性和鲁棒性。文献[3]用模糊推理和自适应控制方法控制对象进行比较,可知其控制性能仍不及本文提出的无模型自适应控制系统。

图4 火电机组在70%负荷时的无模型自适应仿真
3 结论
火电机组机炉协调控制系统是一个具有严重时变、不确定性和耦合的双变量复杂控制系统,其控制品质的改善是提高热工过程自动化水平和实现电网自动发电控制的关键。本文利用无模型自适应控制算法在两控制通道上分别设计了一个无模型自适应控制器,并对其进行控制研究。仿真实验结果显示,采用所设计的控制策略,协调控制系统不仅具有良好的解耦性能,而且对扰动和对象模型的不确定性具有优良的适应性和鲁棒性。此外,本文控制方法易于计算机实现,具有一定的工程应用价值。为提高火电机组机炉协调控制的品质提供了新的思路。
[1] 陈彦桥,刘吉臻,谭文,等.模糊多模型控制及其对500MW单元机组协调控制系统的仿真研究[J].中国电机工程学报,2003,23(10):199-203.
[2] Frederic L M,Gilles D.Design of a controller for a steam generator of a power plant using robust control and genetic algorithm[C].Proceedings of IEEE International Conference on Control Applications,Giasgow,Scotland,U.K,2002.
[3] 卓旭升,周怀春.一种火电机组系统非线性控制方法的实用仿真研究[J].中国电机工程学报,2005,25(10):94-99.
[4] 侯忠生.无模型自适应控制的现状与展望[J].控制理论与应用,2006,23(4):586-592.
[5] Dimeo R,Lee K Y,Boiler-turbine control system design using a genetic algorithm[J].IEEE Trans.Energy Convers,1995,10(4):752-759.
[6] 黄焕袍,武利强,韩京清,高峰,林永君.火电单元机组协调系统的自抗扰控制方案研究中[J].国电机工程学报,2004,24(10):168-173.
[7] 刘翔,姜学智,李东海,万静芳,薛亚丽.火电单元机组机炉协调自抗扰控制[J].控制理论与应用,2001,14:9-152.
[8] 韩志刚.无模型控制器的应用[J].控制工程,2002,9(4):22-25.
猜你喜欢
重型机械(2019年3期)2019-08-27 00:58:52
电子测试(2018年15期)2018-09-26 06:01:04
通信电源技术(2018年5期)2018-08-23 01:17:06
自动化学报(2016年8期)2016-04-16 03:38:51
西北工业大学学报(2015年1期)2016-01-19 03:29:56
能源(2015年8期)2015-05-26 09:15:36
哈尔滨师范大学自然科学学报(2015年6期)2015-04-23 08:20:35
物探化探计算技术(2014年1期)2014-06-27 01:32:50
自动化博览(2014年4期)2014-02-28 22:31:18
中国质量与标准导报(2014年7期)2014-02-28 22:24:35
