百万千瓦机组汽动引风机的控制策略
2011-04-03 10:14:28赵志丹高奎闫旭彦王宏杰陈浩
电力建设 2011年7期
赵志丹,高奎,闫旭彦,王宏杰,陈浩
(西安热工研究院有限公司,西安市,710032)
0 引言
随着国家对节能减排力度的逐步加大,火电机组的厂用电率指标已成为影响电厂发电经济性的一个重要因素。因此,燃煤电厂将锅炉引风机与脱硫系统的增压风机合并,并对合并后的引风机采用汽轮机驱动。汽轮机驱动的引风机具有运行安全,结构紧凑,自动化程度高,节能效果显著等特点,是一种比较优化的能源利用方式。
某电厂1 036 MW机组的锅炉为东方锅炉厂制造的超超临界参数变压直流锅炉,锅炉的2台引风机与脱硫系统的2台增压风机合并,由2台汽轮机(以下的汽轮机称作小汽机)驱动的引风机替代。引风机由成都电力机械厂生产,型号为HA47436-8Z可调轴流式;小汽机由杭州汽轮机股份有限公司生产,型号为NK63/71/0。正常工作汽源采用四段抽汽,启动及调试用汽为辅助蒸汽。小汽机设置独立的轴封、真空系统(配置水环式真空泵3台)以及独立的凝汽器和凝结水泵。小汽机控制上采用数字电液(micro electro hydraulic,MEH)调节系统,调节用油及润滑油均来自独立的小汽机供油装置。
本文仅对汽轮机驱动引风机的自动控制策略及顺序控制加以论述,而相关小汽机辅助系统的控制与给水泵小汽机的控制基本相同。
1 小汽机驱动引风机的运行方式
如图1所示,在风烟系统的结构上,引风机的入口增加入口吸气门连通大气;出口增加启动用调节门及启动用循环烟道插板门,与另1台引风机的入口相连接。
(1)引风机调试期间的启动。
机组在基建过程或大、小修过程烟道未完全建立的情况下,通过打开入口吸气门,利用大气进入引风机来对引风机进行启动调试。
(2)机组启动过程引风机的启动。
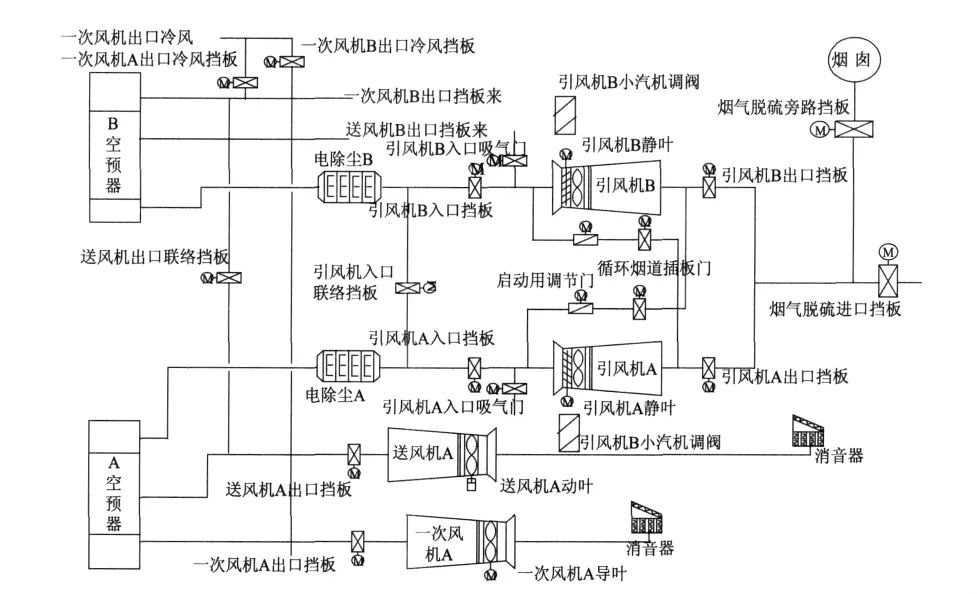
图1 机组风烟系统简图Fig.1 Diagram of fuel-air system
机组正常启动过程,可同时建立两侧烟道的通风,同时对2台引风机进行启动;也可以在到达一定负荷后启动第2台引风机,然后并列运行。
(3)机组正常运行时,引风机检修后的启动。
机组正常运行过程,由于小汽机或引风机出现问题需要检修,在恢复运行时,先打开引风机出口烟气挡板,入口挡板及静叶处于关闭状态,启动用调节门处于某一位置、启动用循环烟道插板门处于全开状态。引风机小汽机转速达到2 000 r/min时,开启引风机入口挡板,关闭启动用调节门及启动用循环烟道插板门。连续提高引风机转速至正常运行引风机的转速后,调节2台引风机的静叶开度,当2台引风机出力一致后,并列运行2台引风机,启动过程完成。
2 小汽机驱动引风机的顺序控制策略
2.1 引风机启动顺序控制
顺序启动允许条件见图2(所有条件相“与”,以B引风机为例)。
(1)引风机A停运或“引风机A运行且任1台送风机运行”;
(2)无锅炉炉膛安全监控系统(furnace safety supervision system,FSSS)通风请求;
(3)引风机B停运;
(4)引风机B小汽机进汽压力、温度正常;辅汽或四段抽汽供汽门开启;

图2 引风机顺序启动允许逻辑Fig.2 Permissive logic for sequence starting of ID fan
(5)引风机B小汽机轴封及真空系统正常运行;
(6)引风机B小汽机凝结水系统、循环水系统及油系统正常运行;
顺序启动步序见图3(执行下一步序前,当前步序反馈条件相“与”)。
2.2 引风机停止顺序控制
顺序停止允许条件见图4(所有条件相“或”)。
(1)少于4台磨煤机运行且冷风联络门全开且送风机A运行;
(2)磨煤机全停。
顺序停止步序见图5。

图3 引风机顺序启动步序Fig.3 Sequence starting procedure of ID fan
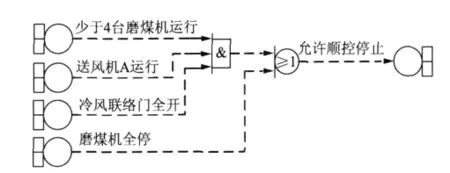
图4 引风机顺序停止允许逻辑Fig.4 Permissive logic for sequence stop of ID fan
3 炉膛负压控制策略
在自动控制上,小汽机驱动的引风机同样用于调节炉膛负压在允许范围内,控制上引风机静叶调节和小汽机转速调节存在变结构的双回路控制。引风机启动时,小汽机冲转至200 r/min后,静叶开至5%并保持;小汽机冲转至3 000 r/min后,遥控投入并保持转速不变,此时,静叶投入自动维持炉膛负压。当机组启动过程随负荷的不断增加,引风机的出力不断增大,当2台引风机的静叶开度均大于70%开度后,炉膛负压的静叶控制回路切至转速控制回路并自动投入转速自动,静叶开度保持不变;在单台引风机运行的情况下,切至转速控制回路的判断条件为运行引风机静叶的开度大于70%;在机组停机降负荷过程中,当2台引风机中任意1台转速小于2 650 r/min后,控制回路切至静叶调节并自动投入自动,引风机维持当前转速不变。因此,在控制上机组正常运行为转速控制,启/停过程会切至静叶控制。此外,转速控制回路上具有快速降负荷(run back,RB)控制的平衡回路。
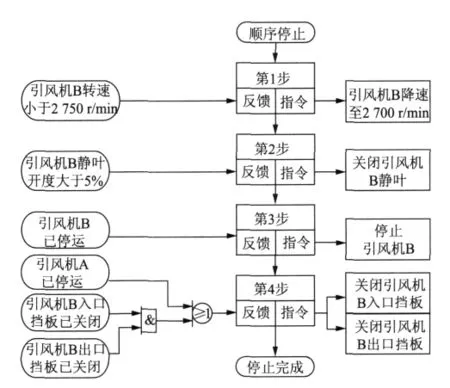
图5 引风机顺序停止步序Fig.5 Sequence stop procedure of ID fan
(1)静叶调节。此控制回路采用常规的单回路比例+积分控制,同时引入送风机动叶的开度指令作为引风机静叶指令的前馈,在恒定转速3 000 r/min的条件下调节负压。此回路仅用于机组启/停过程的低负荷阶段。
根据2.1可以,挖掘出的每个频繁项集都有一个键链表,规则前件与规则后件的键链表相同,同一张表的关联规则,其置信度计算是针对单张表的,多表见的关联规则,其置信度的计算是针对多张表的连接的。因此,可以最大限度地避免统计偏斜。
(2)转速调节。当2台引风机的静叶开度均大于70%开度后,炉膛负压的控制切至转速控制回路,此回路采用串级控制,主调节器用于控制炉膛负压的偏差,调节器的输出指令作为MEH中小汽机转速副回路的设定,在主调节器中引入送风机动叶开度指令的函数作为引风机转速设定的前馈,此回路用于机组正常运行时的调节。控制框图见图6(转速单位为r/min)。
(3)引风机RB控制策略。在引风机转速控制回路中,存在引风机跳闸状态下的平衡回路,考虑送风机RB或引风机RB发生时,均保留单侧的送、引风机运行,此时,运行的引风机在转速调节上(伺服阀)应与送风机动叶的调节速度(快开)同步。因此,在送风机动叶联开的情况下,运行引风机的转速变化率为600 r/min,以保证炉膛负压的稳定。
4 控制策略的关键点和难点
采用汽动引风机的机组,其控制策略的关键点在于:控制上不仅存在引风机的静叶调节,而且存在小汽机的转速调节,控制上的变结构相对复杂;2个控制结构必须通过图3中的判断逻辑才能保证相互跟踪和无扰切换。在自动方式下,2个控制回路中的调节器只有1个处于调节状态。此外,转速控制方式下的调节器参数整定是一个串级控制方式,主回路控制炉膛负压必须确保稳定性,副回路的转速调节必须确保快速性。
实现上述控制策略的难点在于:首先运行工况的多变性,包含的运行方式如启动过程、单侧运行、并列运行等,对机组的控制提出相关的要求;其次,2台引风机出力的均衡性,要求检修时必须保证静叶的开度指示与机械角度的相互对应,在机组运行中所要求的75%开度位置上,2台引风机的出力是一致的,这样才能保证上述控制结构切换的正确合理。否则,不能确保在50% ~100%负荷运行区间引风机一直处于转速调节方式。此外,两侧引风机出力的不平衡,还对机组两侧的排烟温度产生影响。
在RB控制策略上,由于机组正常运行时引风机处于转速控制方式,调节较快;当送风机RB、引风机RB发生时,控制上应当注意单侧运行的送风机、引风机快开过程的相互平衡,处于转速调节的引风机在其平衡结构中应增加1个指令的变化率,保证超驰状态下,送风机、引风机的出力相一致。
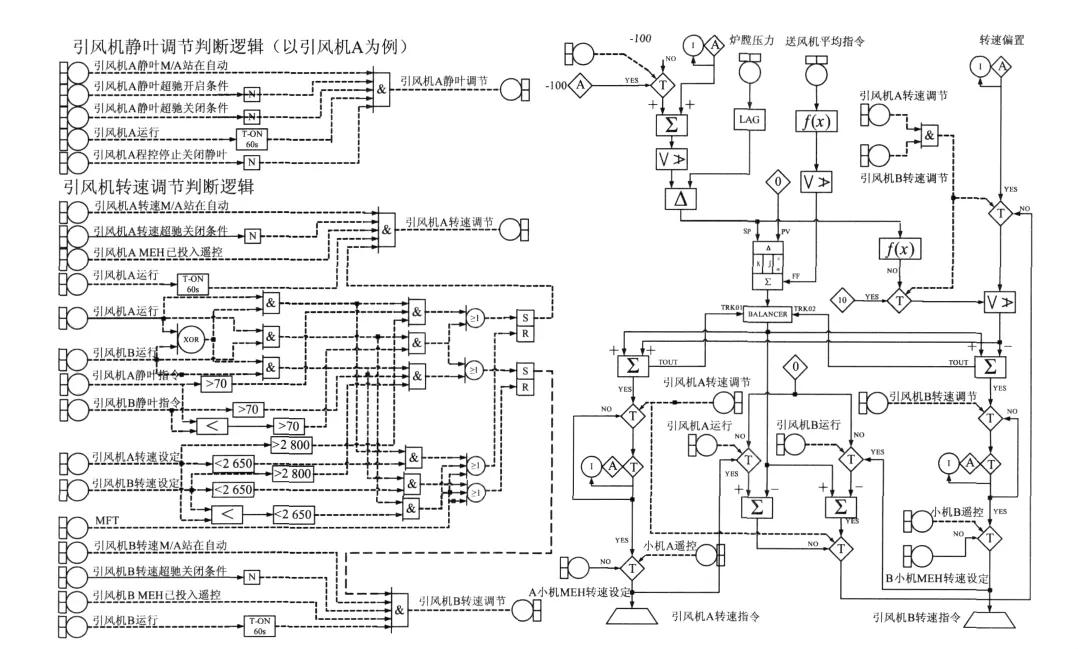
图6 引风机转速控制回路及切换逻辑框图Fig.6 Speed control loop and switching logic diagram for ID fan
5 调试过程出现的问题及处理措施
(1)第2台引风机冲转时,因入口挡板未联开而跳闸。
原设计中的引风机跳闸条件为:“引风机小机挂闸且转速大于2 700 r/min延时60 s后,如果入口挡板关闭,跳引风机”。而入口挡板的联开逻辑为:“引风机小机挂闸且转速与第1台引风机小机转速偏差小于200 r/min,延时10 s联开入口挡板”。在已有1台引风机处于较高转速运行(例如3 500 r/min)的情况下,当第2台引风机启动冲转至2 700 r/min以上后,由于转速偏差尚未满足小于200 r/min的条件,故入口挡板不能联锁开启,但引风机小机挂闸且转速大于2 700 r/min的条件满足,因此60 s后引风机跳闸。
针对以上问题,为保证第2台引风机启动时与已经运行的引风机顺利并列,对引风机入口挡板关闭跳闸引风机的逻辑进行改进,从而避免了第2台引风机启动过程中发生的跳闸情况。
改进后逻辑如图7所示。
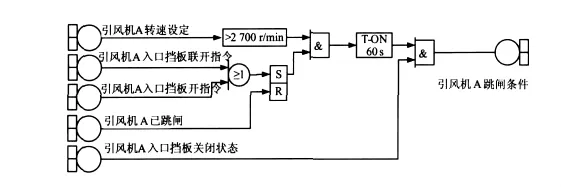
图7 修改后的跳闸逻辑Fig.7 Modified tripping logic
(2)2台引风机控制方式不同步造成的炉膛负压波动。
引风机静叶调节与转速调节切换条件独立设置,单台引风机切换条件满足后即进行调试方式的转换。静叶调节切换至转速调节的主要判断条件为:静叶指令大于70%;转速调节切换至静叶调节的主要判断条件为:小机转速小于2 650 r/min。为保证运行过程中两侧引风机出力平衡,引风机静叶及小机转速可能存在偏差,由此在调节方式切换时,1台引风机首先进行切换,造成两侧风机调节方式不同步,一个在静叶控制,另一个在转速控制,引起炉膛负压调节产生较大波动。
针对这一问题,对调节方式切换条件进行改进,当2台引风机静叶指令均大于70%,静叶调节切换至转速调节;当2台小机转速均小于2 650 r/min,转速调节切换至静叶调节。确保2台引风机同时进行调节方式切换,从而避免了两侧引风机因调节方式不同造成的炉膛负压波动。
(3)引风机转速调节回路改进。
引风机转速调节回路采用单回路控制,通过PID对炉膛负压偏差进行运算产生引风机转速指令。由于引风机的出力随转速不断改变,因此在不同转速阶段采用相同的调节参数已无法满足调节品质的要求,因此在不同转速阶段对PID调节器采用变参数控制以确保炉膛负压调节品质。
引风机的转速调节回路仅设置了PID调节器,没有送风机动叶指令前馈作用,因此变负荷过程中,转速调节回路响应迟缓,炉膛负压偏差大。针对这一问题,在转速调节回路中增加送风机动叶指令的前馈作用,以达到变负荷过程中引风机转速与送风机动叶间的平衡。
6 变负荷过程的炉膛负压控制曲线
机组在正常运行范围,2台引风机投入转速控制回路后,调节曲线见图8。图中右侧纵坐标数值从上至下分别代表曲线1—9所对应的值。机组连续减负荷从1 000 MW降至700 MW,负荷变化率10 MW/min,整个过程炉膛压力偏差在±80 Pa之内,通过小汽机转速调节炉膛负压,在各工况下的调节品质稳定、准确、快速,满足机组运行的要求。
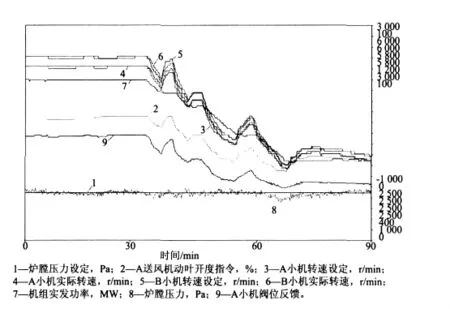
图8 机组炉膛负压调节曲线Fig.8 Adjustment curves for furnace draft
7 结论
经过汽动引风机的启动调试及带负荷、满负荷试运,特别是负荷变动试验、自动发电量控制考核试验以及机组的RB试验,汽动引风机的控制策略满足机组各种工况的运行需求,不但确保了机组的安全稳定运行,而且对提高机组运行的经济性提供了新的思路。以电厂运行报表统计的数据,采用汽动引风机的3号机组与1号机组(同类型机组采用电机驱动的引风机及脱硫增压风机)相比较,在小汽机用的抽汽量未折算为低压缸做功的情况下,月平均厂用电率分别为3.07%和4.34%。由此可见,采用小汽机驱动引风机替代电动引风机和电动脱硫增压风机,能获得很好的经济效果。
[1]赵志丹,高奎,梁朝,等.华能海门电厂一期工程1号机组调试报告[R].西安:西安热工研究院,2009.
[2]赵志丹,高奎,闫旭彦,等.华能海门电厂一期工程3号机组调试报告[R].西安:西安热工研究院,2010.
[3]赵志丹,陈志刚,郝德锋,等.火电机组RB控制策略及其试验中应注意的问题[J].热力发电,2010,22(6):48-50.
[4]赵志丹,宋太纪,陈志刚,等.AGC控制功能优化研究[J].热力发电,2010,22(11):77-81.
[5]西安热工研究院.超临界、超超临界燃煤发电技术[M].北京:中国电力出版社,2008.
[6]广东省电力设计研究院.汽轮机驱动引风机专题报告[R].广州:广东省电力设计研究院,2010.
[7]赵志丹,李文军,陈志刚,等.直接能量平衡在协调控制中的应用及优化[J].热力发电,2008,20(4):1-5.
[8]赵志丹,党黎军,郝德峰.300 MW循环流化床空冷机组的RB控制策略及优化试验[J].中国电力,2009,42(2):60-63.
[9]赵志丹,陈志刚,王开柱.配置双进双出磨煤机的超临界600 MW机组的主蒸汽温度控制[J].热力发电,2010,22(2):91-94.
[10]赵志丹,王邦行,段景卫,等.不带外置床300 MW循环流化床机组的协调控制及优化[J].电力建设,2010,31(9):78-82.
猜你喜欢
电力设备管理(2022年15期)2022-11-26 17:27:47
上海理工大学学报(2021年3期)2021-07-20 08:04:04
环境卫生工程(2021年1期)2021-03-19 05:22:30
商品与质量(2020年1期)2020-11-26 19:59:07
水上消防(2020年2期)2020-07-24 09:27:06
冶金设备(2019年6期)2019-12-25 03:08:42
资源节约与环保(2018年1期)2018-02-08 02:17:44
北京航空航天大学学报(2016年12期)2016-02-27 06:32:39
电力与能源(2015年5期)2015-12-16 07:26:00
电力安全技术(2012年11期)2012-03-29 10:38:18