三电平逆变器供电的感应电动机转差频率控制系统
2011-03-20 02:23:40吴光彬刘陵顺戴洪德
船电技术 2011年4期
吴光彬 刘陵顺 戴洪德
(海军航空工程学院控制工程系, 山东 264001)
1 引言
在上个世纪,直流电动机就已经在工业领域用于调速控制,原因是直流电动机的磁通和转矩可以很容易的由磁场和电枢电流分别控制。随后,实现了感应电动机的四象限运行,由于感应电动机结构简单,运行可靠,所以感应电动机迅速在工业应用领域得到普及,起初,感应电动机只能在转速恒定的场合使用,随着电力电子技术的发展,变频电源得到了发展应用,因此,感应电动机的应用也扩展到变速应用领域。多电平逆变器反馈控制的感应电动机在动态特性上的表现可以媲美直流电动机。
建立在旋转坐标系上的动态方程可以更好的描述感应电动机的特性,感应电动机的变速调节在相当多的机电系统中得到应用,当要求感应电动机在宽广的速度范围内具有较好的动态特性和较高的控制精度时,可以采用带速度传感器的矢量控制的感应电动机,当对动态特性和控制精度的要求不太高时,可以采用无传感器的感应电动机控制技术。电力电子技术的发展使得多级逆变器可以取代大尺寸的滤波器[1]。
二极管箝位型三电平逆变器在高压大功率应用中相对于传统两电平电压型逆变器表现出了明显的优势,引起了人们广泛关注。电压型逆变器的输出性能主要取决于其调制方法,空间电压矢量调制技术以其易于数字实现,电压利用率高等优点,得到了广泛的应用,此外,在空间电压矢量调制中若采用合适的调制算法还可以有效地抑制甚至消除共模电压[2]。论文中,空间向量调制技术被用来减小谐波含量。传统逆变器的谐波功率损耗很大,换言之,多级逆变器的谐波功率损耗很小。二极管箝位的逆变器从一系列电容上提供多级电平。跨过开关的电压大小仅是DC母线电压的一半,这个特点可以在给定的二极管器件的条件下,有效的提高电源额定功率[3]。论文提出了多级逆变器实现的感应电动机的转差频率控制的方法,详细的仿真、控制电路的实现。
2 三电平逆变器的原理[4-5]
二极管箝位型三电平逆变器主电路拓扑如图1所示,该拓扑结构的特点是采用两个功率器件串联,电压中点有一对二极管箝位,因而各主功率开关器件承受的电压是直流侧电压的一半,即相对于传统两电平逆变器来说,主功率开关器件的耐压可降低一半。
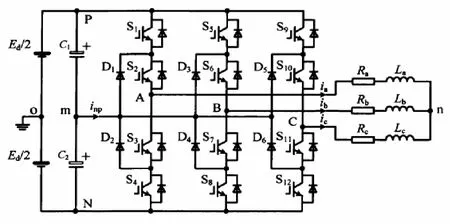
图1 三电平逆变器主电路拓扑结构图
电路开始工作前,直流回路上的电容Cl和C2先通过预充电电路充电,其稳态电压为直流回路电压的一半,即Ed/2。由图1可以看出,逆变器每一相桥臂有4个开关器件,在这个电路中直流母线电压被两个串联大电容C1和C2分割成三个等级。两个电容的中间点m被定义为中性点。经过分析不难发现,输出电压VAO具有三个状态:Ed/2,0和-Ed/2,对于电压等级Ed/2,开关S1,和S2必需接通,输出电平定义为P;对于电压等级-Ed/2,S3和S4需接通,输出电平定义为N;而对于0电压,S2和S3需接通,此时输出电平定义为O。由此可见,电路工作时逆变器的一相桥臂输出具有三种电平:P、O、N。
3 三电平逆变器空间电压矢量调制(SVPWM)方法[6-7]
3.1 三电平空间电压矢量图及其扇区划分
三电平逆变器三相输出电压经 Park变换后的空间电压矢量为

通常,逆变器利用开关器件的开通和关断经由各相只输出Ed/2,0和-Ed /2三种电压,通过式(1)的变换,输出电压矢量有 27种类型,或者说逆变器输出27种基本矢量,如图2所示。这里,一般将幅值为2Ed/3的矢量定义为大电压矢量,如 PNN,PPN;幅值为Ed/3的矢量定义为中电压矢量,如PON;幅值为Ed/3的矢量定义为小电压矢量,如POO,ONN。以上三类矢量可以分别简称为大矢量、中矢量和小矢量。本文将开关状态由P和O组成的小矢量称为正小矢量,如POO,将开关状态由N和O组成的小矢量称为负小矢量,如ONN。
由图2可以看出,小矢量总是成对出现,如PPO与OON,一般称之为冗余小矢量。
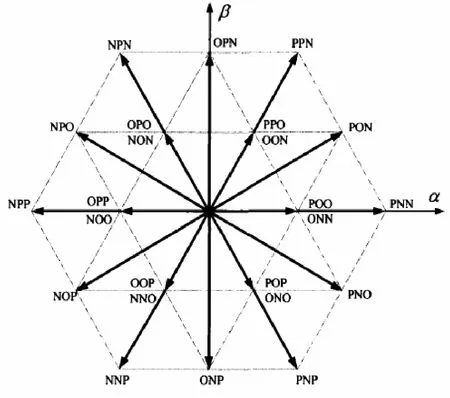
图2 三电平逆变器空间电压矢量图
如图3所示,六个大电压矢量将空间矢量图分为六个正三角形区域,以大矢量PNN为起始沿逆时针每60°依次定义为扇区I、II、…、VI。进一步地可以将每个正三角形区域分为4个小三角形,这样,整个空间矢量图一共可以分为24个小三角形。任何平衡的三相参考电压都可在空间矢量图上以一空间矢量表示,在任何时刻,参考电压矢量将处于这些三角形中的一个。为了获得最小的谐波畸变,参考矢量应由最接近的三个空间矢量来合成[1]。例如,当参考矢量处于图 4所示的扇区I的三角形B中时,所使用的空间矢量为PON、PNN以及POO/ONN(这是一对冗余小矢量)。
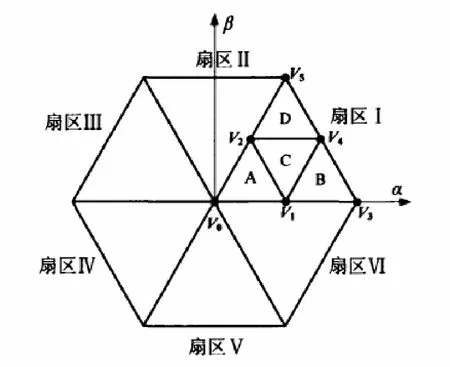
图3 三电平逆变器空间电压矢量扇区示意图
对每个 60°的大三角形区域进行分析,然后根据对称性,可以得到整个360°范围的工作情况的分析。对应不同的逆变器调制深度,三相电压合成的电压空间矢量幅值也不同,则合成的电压空间矢量端点轨迹将会分别落在图2的内正三角形,外正三角形或内外正三角形之间,对应图 3的分别是A三角形,B和D三角形或C三角形区域。
3.2 参考电压矢量位置与输出电压矢量的确定
SVPWM的首要任务就是判断参考电压矢量位于哪个区域及该区域中的哪个小三角形,然后依此确定出相应的输出电压矢量。首先,根据参考矢量的幅角确定出该矢量位于六个正六边形区域中的哪一个,然后可以进一步判断位于哪个小三角形区域。
空间向量调制SVPWM是基于在α-β静止坐标系下向量选择,考虑在三电平系统下定义的某个参考电压向量,该电压向量在图4中和其他可用向量一起画出。如果负载需要一个三相电压族,期望的向量Vref将沿圆形轨迹运行。SVPWM 策略的第一步是找出最近的三个向量。
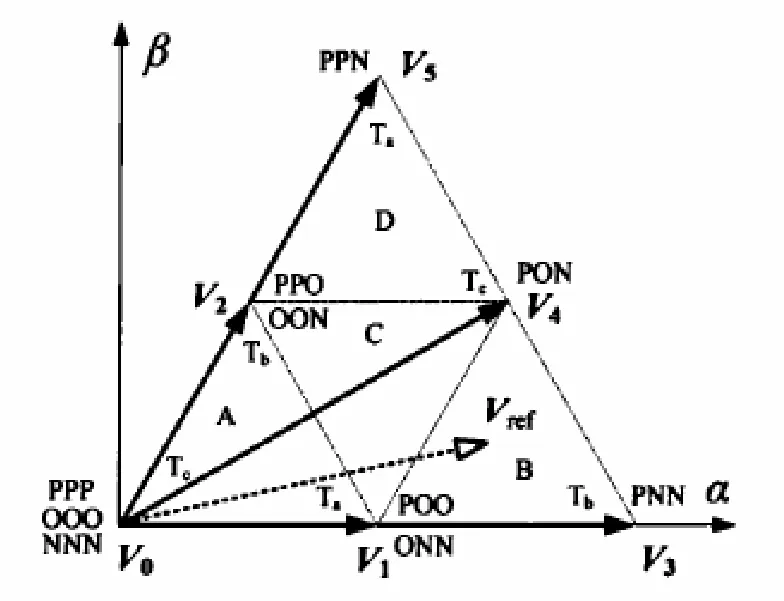
图4 扇区I中参考电压矢量的合成
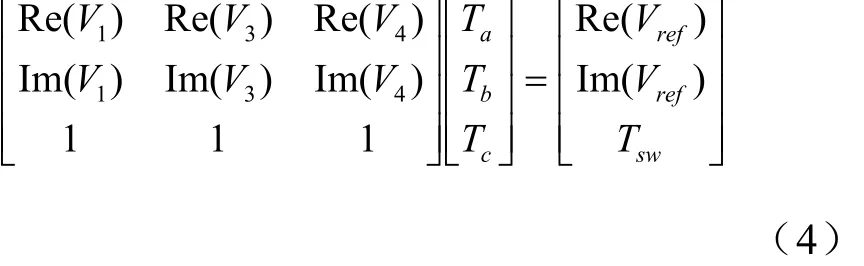
在这个例子中,与期望的向量Vref对应的是V3,V4和冗余向量V1(POO/ONN)。下一步是决定每个向量的时间长度以使平均电压等于期望的电压,这可以由简单的数学关系得到,向量和相应的时长由下式确定:

式中,Tsw是PWM控制的总导通时间,有:

根据(2)和(3)两式,每个向量导通的时间可以通过解下式确定:
SVPWM 策略的最后步骤是决定电压向量的开关顺序和相应的输出电压[7]。
4 三电平逆变器供电的感应电动机仿真实验
构建Matlab Simulink仿真电路(图5)进行三电平逆变器供电的感应电动机矢量控制仿真实验,系统的控制部分由参数给定,PI调节器,函数运算,二相/三相坐标变换,SVPWM脉冲发生器等环节组成。其中给定环节有定子电流励磁分量im*和转子速度n*。放大器G1,G2和积分器组成带限幅的转速调节器ASR。电流电压模型转换由函数Um*、Ut*模块实现。函数运算模块ωs*根据定子电流的励磁分量和转矩分量计算转差ωs,并与转子频率ω相加得到定子频率ω1,再经积分器得到定子电压矢量转角θ。模块sin,cos,dq0/abc实现了二相旋转坐标系至三相静止坐标系的变换。
三电平逆变器的模型采用图2的电路,仿真了给定转速为1400 r/min时的空载起动过程,在起动后0.45 s加载TL=65 N·m。在仿真结果中图6、图7、图8和图9分别反映了电动机的转矩、定子电流、转速和转差频率的变化过程,在电机起动中,逆变器输出电压逐步提高,转速上升,但是电流基本保持不变,Is=50/=35 A,电动机以给定的最大电流起动。在0.39 s时转速稍微有超调后稳定在1400 r/min,电流也下降为空载电流。电动机在加载后电流迅速上升,电动机转矩也随之增加,转速在略经调整后恢复不变。
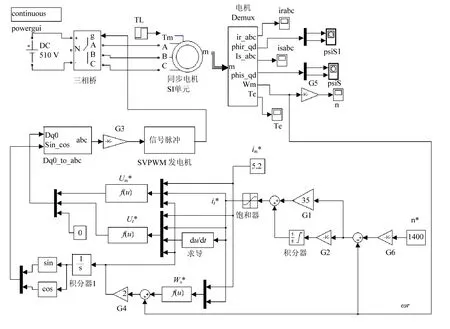
图5 转差频率控制的矢量控制系统仿真模型
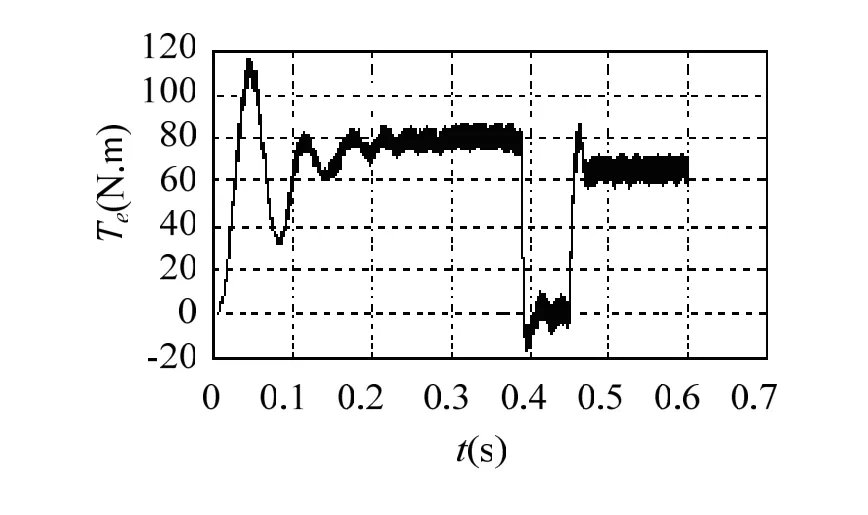
图6 电动机电磁转矩曲线
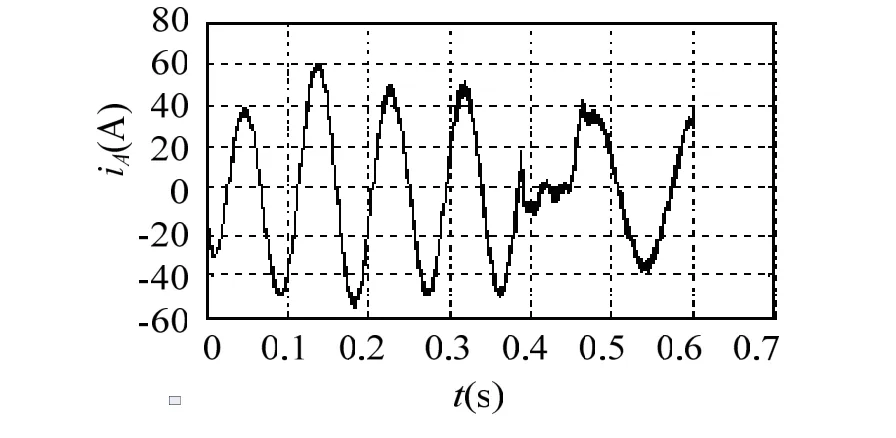
图7 电动机定子一相电流波形
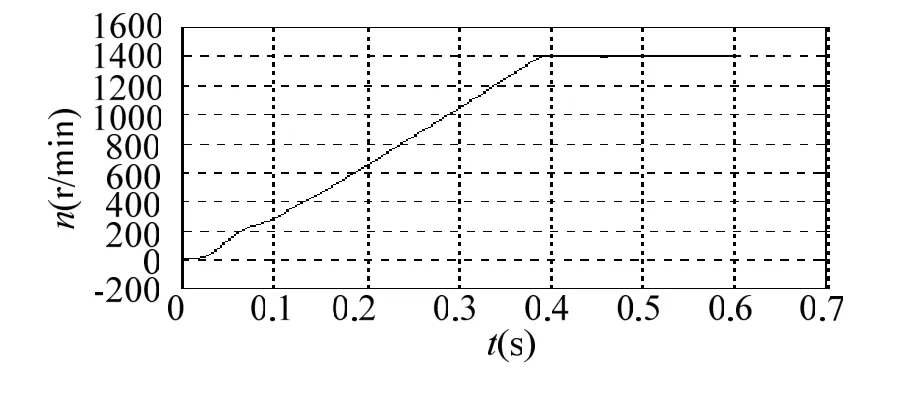
图8 电动机转速曲线

图9 计算得到的转差频率ws*给定数值
5 结束语
仿真的结果表明,采用三电平逆变器供电转差频率控制的感应电动机矢量控制系统具有良好的控制性能。从实际应用的角度来看,三电平逆变器是最为具有实际应用价值的多电平电路,具有拓扑相对简单,所用器件相对较少,可靠性高等特点,对以此拓扑结构为基础构成的高性能异步电机直接转矩控制系统进行深入研究具有实际意义。由于时间和条件的限制,目前尚有许多工作未能进一步展开,本文认为以下的工作还值得进一步研究:1)建立更高性能的实验平台,对以定子电流、定子磁链为状态变量构成的全阶观测器的磁链观测方案和速度辨识算法进行实验验证。2)在保证系统稳定的情况下,利用合适的控制理论和控制方法实现电机参数的在线辨识。3)在三电平空间矢量调制中考虑对共模电压的抑制,以降低电机轴电流。
[1] K.Yamanaka et al,(2002). A novel neutral point potential stabilization technique using the information of output current polarities and voltage vector. IEEE Trans. Ind,Appl.Vol38,No.6, pp.1572-1580.
[2] Q. Song, W. Lui,Q.Yu, X.Xei, and Z.Wang,(2003). A neutral-point potential balancing algorithm for three-level NPC inverters using analytically injected zero-sequence voltage. Proc. Applied Power Electronics Conf. Miami Beach, FL,Vol 1,pp.228-233.
[3] Zhang, AV.Jouanne, S.Dai,AK.Wallace, F.Wang, (2000).Multilevel inverter modulation schemes to eliminate common-mode voltages. IEEE Trans on Industry Applications Vol.36, No.6 , pp1645-1653.
[4] Josb Rodriguez, Jih-Sheng Lai, and Fang Zheng Peng.Multilevel inverters: A survey of topologies, controls,and applications. IEEE Transactions on Industrial Electronics, Vo1.49, No.4, August, 2002, 724-738.
[5] J.S. Lai and F.Z. Peng. Multilevel converters-A new breed of power converters. IEEE Trans. Ind.Applicat,vol.32,pp.509-517,May/June 1996
[6] F. Zeng Peng,(2001). A generalized multilevel inverter topology with self voltage balancing. IEEE Trans on Industry Applications Vol.37, No.2,pp 611-618.
[7] 宋文祥, 陈国呈, 束满堂, 丁肖宇. 中点箝位式三电平逆变器空间矢量调制及其中点控制研究. 中国电机工程学报,2006,vol.26,No.5,pp.105-109.
猜你喜欢
中学生数理化·高一版(2021年11期)2021-09-05 12:21:24
防爆电机(2021年1期)2021-03-29 03:02:46
测控技术(2018年2期)2018-12-09 09:00:52
现代防御技术(2016年1期)2016-06-01 12:13:28
电测与仪表(2016年22期)2016-04-12 00:19:58
新高考·高一物理(2016年1期)2016-03-05 22:47:39
电子工业专用设备(2015年4期)2015-05-26 09:10:33
电测与仪表(2015年2期)2015-04-09 11:28:58
电机与控制应用(2015年10期)2015-03-01 03:50:16
电测与仪表(2014年7期)2014-04-04 12:09:32