基于BP神经网络的改进增量式PID暖通控制器设计
2011-03-19 03:44张健沛薛立波
黑龙江大学工程学报 2011年2期
孙 朋,张健沛,薛立波
(1.哈尔滨工程大学 计算机科学与技术学院,哈尔滨 150001;2.黑龙江省民政厅 信息中心,哈尔滨 150001)
0 引 言
自上世纪60年代暖通空调系统的自动控制开始兴起以来,经过几十年的发展,逐步发展成为以PID控制算法为核心的直接数字控制。但是,暖通空调系统是一个典型的大滞后、多变量、分布参数的强非线性时变系统,难以建立其精确的数学模型。常规PID控制器具有一定的鲁棒性,在某时刻、某条件下整定好的参数,一旦被控对象的结构和参数改变,在另一时刻、另一条件下原参数控制效果往往不佳;加之,常规PID在设计与整定过程中,需采用折中的方案来兼顾控制的稳态精度和动态性能,所以常规PID控制器的设计有其局限性,单一的PID暖通空调控制器难以满足要求。
神经网络理论的发展为解决非线性系统和不确定性系统控制问题提供了有效途径,基于神经网络的PID控制已成为暖通空调的研究热点。它将PID控制律融入到神经网络之中,实现了神经网络和PID控制的结合,从而既具有传统PID控制器的优点,又具有神经网络的并行结构和学习能力以及多层网络逼近任意函数的能力。
1 基于BP神经网络的PID控制器设计
PID控制要取得好的控制效果就必须调整好比例、积分和微分3种控制作用在形成控制量中,相互联系又相互制约的关系,这种关系不一定是简单的线性组合,而是可以从各种非线性组合中找出最优的组合。而BP神经网络具有任意非线性逼近能力,可以对系统性能进行学习,为实现最优组合的PID控制提供了可能。
BP网络算法的基本思想是:把网络学习时在输出层出现的与期望值不符的误差,归结为各层各节点连接权和阀值的 “过错”,通过把输出层误差逐层向输入层反向传递,把误差 “分摊”给各个节点,计算各节点的参考误差,由此调整各个权值和阀值,直至误差最小。
在修正网络的加权系数时,BP网络采用非线性规划中的最速下降法,即按照误差函数的负梯度方向搜索调整,并附加一个使搜索快速收敛全局极小的惯性项。
基于BP神经网络的PID控制器由一个常规PID控制器和一个3层的 BP网络构成,常规的PID控制器直接对被控对象进行闭环控制,BP网络根据系统的运行状态,通过自学习和加权系数调节,使神经网络输出层的输出状态对应于PID控制器的 3个参数,并达到某种性能指标下的最优化。
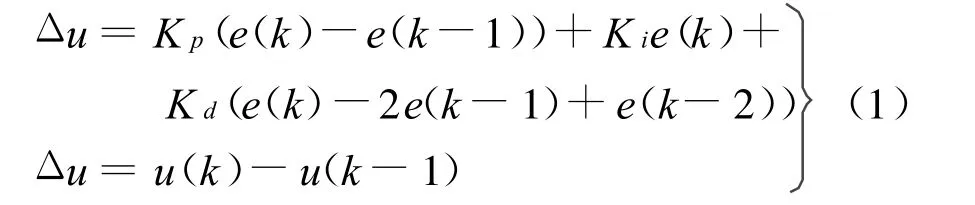
控制器结构图见图1,可以得出常规PID控制器的控制律为:
假设BP网络是个3层网络,有M个输入节点,Q个隐层节点和3个输出节点。输入节点对应所选的系统运行状态量,一般可取系统不同时刻的输入量和输出量。输出节点对应PID控制器的3个参数。取隐层神经元活化函数f(x)为正负对称的Sigmoid函数,输出层神经元活化函数g(x)为非负的Sigmoid函数。并约定上角标(1)、(2)、(3)分别代表输入层、隐含层和输出层。
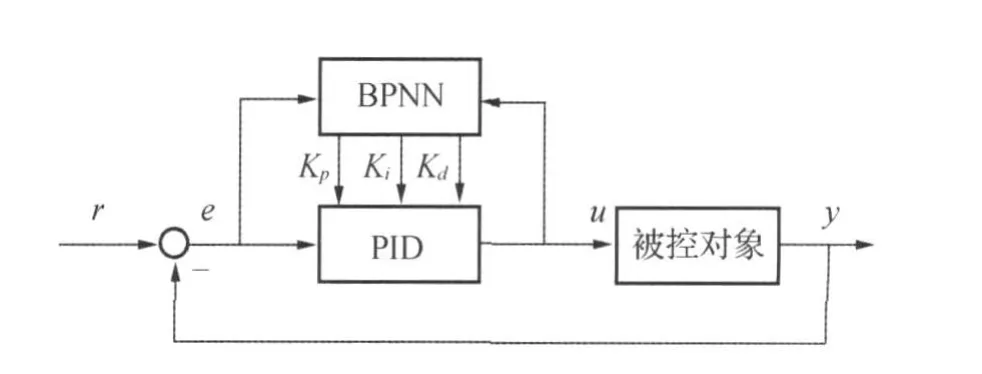
图1 基于BP网络的PID控制器结构图Fig.1 Structure of PID controller based on BP Network
网络输入层的输入为:

其中,j=1,2,…,M。
网络隐层的输入、输出为:
其中,i=1,2,…,M。
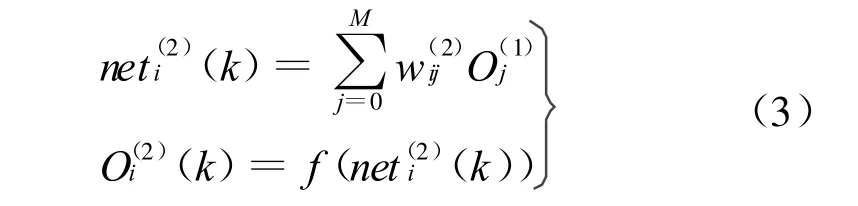
网络输出层的输入、输出为:
其中,l=1,2,3。
选取性能指标函数为:

接下来修正网络权系数,按照梯度下降法,并附加一个使搜索快速收敛全局极小的惯性项:

其中η为学习速率;α为惯性系数。
式(6)中的偏微分项可作以下推导:

通过上述分析,可得网络隐含层加权系数的学习算法为:
同理可得网络输出层加权系数的学习算法为:

其中f′(◦)=(1-f2(x))/2;g′(x)= g(x)(1-g(x))。
这样,由式(5)~式(9)就可以对BP网络的权值进行调整,实现对BP网络的训练。
2 暖通空调系统应用实例
通过系统辨识,已知暖通空调系统中某回路的系 统 模 型 为属于典型的非线性时变系统。
采用基于BP神经网络的PID控制对该回路系统进行仿真,选定BP网络结构为4-5-3结构,控制器软件编程控制算法步骤如下:
1)在k=1时刻,选取各层加权系数的初始值为[-0.5,0.5]上的随机数,选定学习速率η为0.2和惯性系数α为0.05;
2)采样得到r(k)和y(k),计算该时刻误差e(k)=r(k)-y(k);
3)计算神经网络各层神经元的输入、输出,输出层的输出即为PID控制器的3个可调参数Kp,Ki,Kd;
4)根据PID的增量式算式计算PID控制器的输出、控制对象的控制信号u(k);
5)进行神经网络学习,在线调整隐含层和输出层加权系数,实现PID控制参数的自适应调整;
6)置k=k+1,返回到步骤2)。
该回路系统受正弦信号激励下,采用BP神经网络的PID控制的仿真结果见图2。
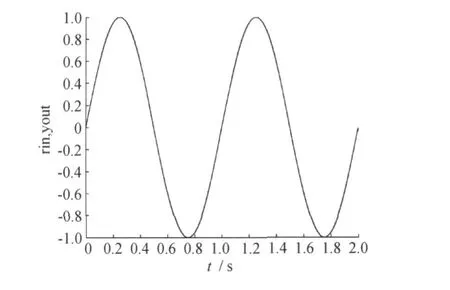
图2 BP神经网络的PID控制仿真曲线Fig.2 BP-PID simulation curve
作为对照,对常规增量式PID控制进行仿真,结果见图3。
由仿真结果可见,BP神经网络PID控制的输出对输入的响应高度吻合,曲线几乎重合在一起,控制效果十分优异,而常规增量式PID控制的仿真曲线响应存在明显的误差。为了对比控制效果,做出两者的误差曲线以供比较。其中,图4为BP神经网络PID控制器的误差曲线,图5为增量式PID控制器误差曲线。
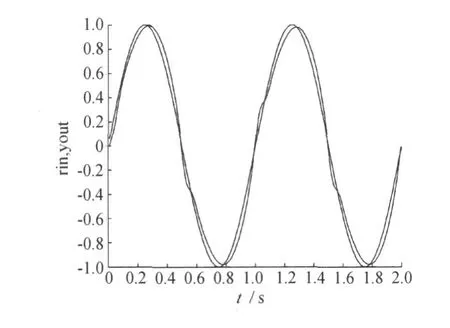
图3 常规增量式PID控制仿真曲线Fig.3 Conventional incremental PID simulation curve
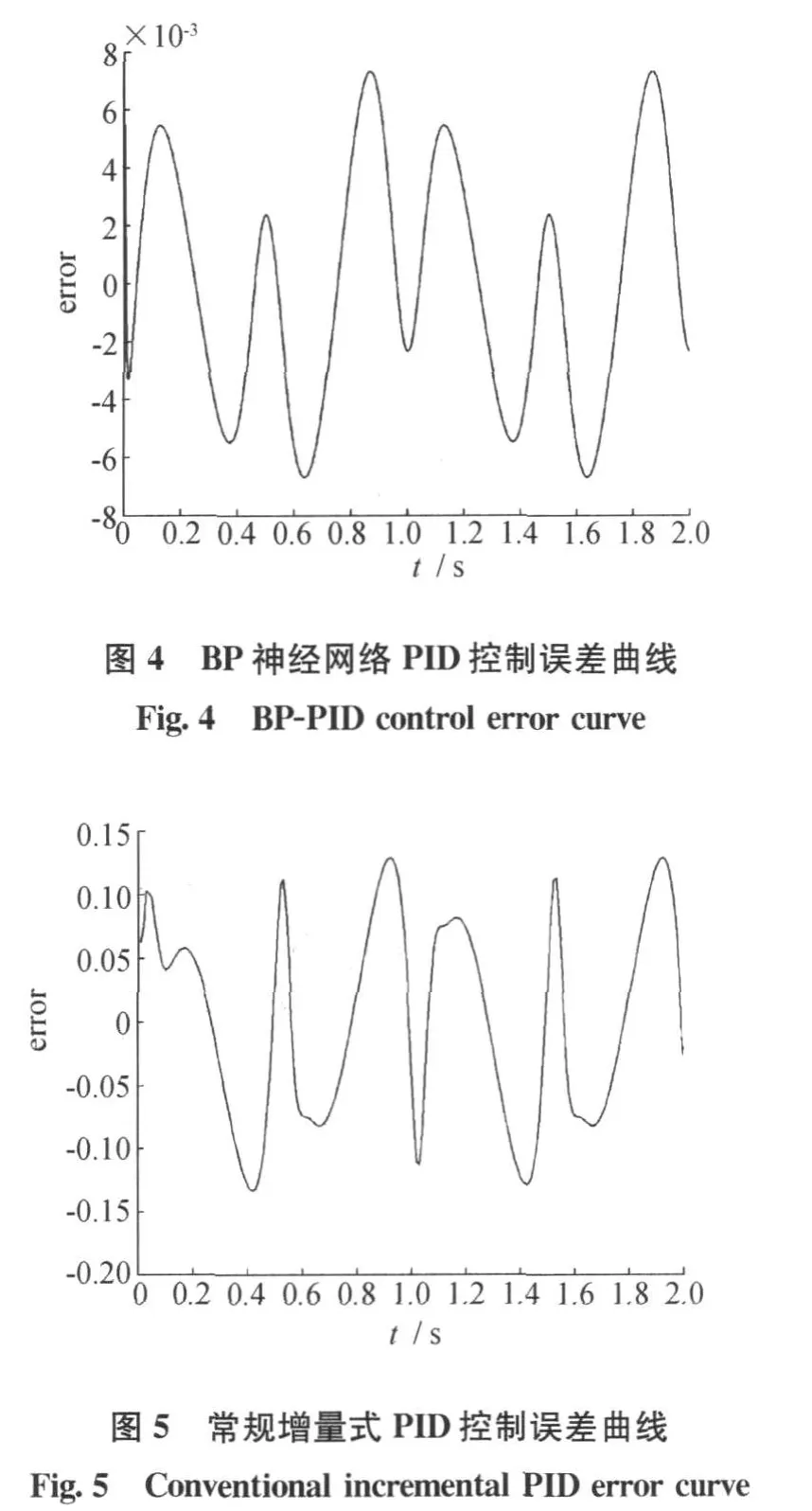
如图4所示,BP神经网络PID控制误差的数量级为10-3,最大为0.008,而增量式PID的最大误差约为0.13,显然,BP神经网络PID控制拥有更好的控制精度。
综上所述,神经网络PID控制与传统PID控制相比,超调量小、调节速度快、调整时间短,说明其具有更好的控制特性;另外,稳态误差也比传统PID控制下的稳态误差小,说明神经网络PID比传统PID控制的控制精度更高。
3 结 语
把BP神经网络和PID控制结合到一起,可有效解决暖通空调系统PID控制中存在的由于模型和结构参数时变等因素导致的控制效果欠佳问题。
本文的创新点:在暖通空调控制系统中引入BP网络,使PID控制器能在线整定PID的3个控制参数,克服了常规PID控制对时变系统参数整定的难题;可变的PID参数能使暖通空调系统更快地响应环境变化,在节能舒适方面达到了消费者对暖通空调的进一步要求。
[1]安大伟,王江江,娄承芝.神经网络PID控制器在高大空间恒温空调系统中的应用 [J].天津大学学报, 2005,38(3):268-273.
[2]廖芳芳,肖 建.基于BP神经网络PID参数自整定的研究[J].系统仿真学报,2005,17(7):1 711-1 713.
[3]张芳芳,贺 娟,李明军.基于导数优化的BP学习算法的研究综述 [J].计算机应用研究,2009,26 (3):809-813.
[4]张世峰,李 鹏.基于神经网络的自整定PID控制器设计[J].自动化仪表,2009,30(7):64-66.
[5]赵娟平.神经网络PID控制策略及其M atlab仿真研究[J].微计算机信息,2007,23(3-1):59-60.
猜你喜欢
建材发展导向(2022年3期)2022-04-19
建材发展导向(2022年5期)2022-04-18
电子制作(2019年19期)2019-11-23
建材发展导向(2019年5期)2019-09-09
小学阅读指南·低年级版(2017年5期)2017-05-18
汽车维护与修理(2016年10期)2016-07-10
重型机械(2016年1期)2016-03-01
大连工业大学学报(2015年4期)2015-12-11
汽车维护与修理(2015年7期)2015-02-28
海军航空大学学报(2015年4期)2015-02-27