基于单片机的自动水平调节系统
2011-03-13 09:30:08侯健生
自动化与信息工程 2011年3期
侯健生
(广东省珠海市质量计量监督检测所)
1 引言
全站仪是罐体体积计量中一种重要的测量仪器,它的准确测量是建立在水平面平整的基础上,而目前大多数的全站仪的水平面调节都需要人工进行。在浮顶罐的测量中由于人员的走动可能使全站仪的水平面发生变动,故在调整完成仪器的水平后人员必须留在原地以保持安定面,且在测量过程中也不可有较大的移动以免影响测量精度,这对于在狭小空间内的操作人员是一个很大的考验。为了让操作人员能从束缚中解放出来,同时避免人为因素影响测量精度,本文设计了一种基于单片机控制的自动水平调节系统。
2 系统设计思路
该系统的设计思路是通过对水平尺的测量确定全站仪所处的平面,由单片机控制位于底座的伺服电机来调整全站仪的平面与水平面平行。因为全站仪是三点支撑,所以调整原理是:以一个点为固定点、另外两点为动点,确定一个通过固定点的平面,通过调节两个动点的高度,使平面与水平面平行[1]。
该系统由两个水平测量模块、两个高度调整模块和一个控制单元组成。
水平测量模块是由水平尺和光电传感器组成。单个水平测量模块:在一个水平尺轴向上均匀分布七组光电传感器,传感器为直射式的红外二极管模块[2]。两组光电传感器之间的距离为二分之一个水泡的长度,七组传感器将水泡的位置分为了13个状态位。每组传感器对应一个控制单元的I/O口。两个水平尺测量模块相互垂直,从而确定169个(13×13)平面状态,控制单元根据平面状态来调整平面至水平。水平尺结构及光电测量点示意图如图1所示。
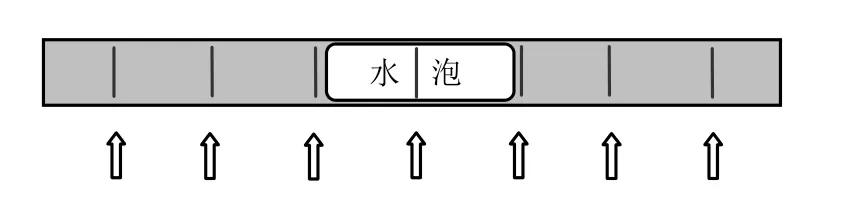
图1 水平尺结构及光电测量点示意图
高度调整模块由步进电机、丝杠机构和限位机构组成。步进电机驱动丝杠机构[3]从而调节底座支撑盘的高度。限位机构位于丝杠的始端和末端,可防止丝杠滑出,且在极限位置时可使控制单元调整调节方案。全站仪为三角支撑,高度调整模块位于其中的两个支撑点下,另外一个为固定点。
图2为高度调整模块结构和位置示意图,箭头所指的位置为高度调整点。
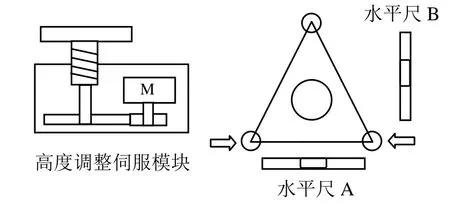
图2 高度调整模块结构和位置示意图
控制单元采用8051单片机作为处理单元[4]:P1、P2口分别连接水平测量模块,采集水平测量信号;P0口用于控制步进电机;中断口 INT0用于连接红外接收器;串口与全站仪或上位机连接。控制程序主要分四个部分:红外信号处理、水平测量信号处理、调整方式处理和电机驱动信号处理。程序框图如图3所示。
红外信号处理:主要是用于对红外信号进行解码。由于本系统的信号指令较少,故采用软件解码以减少外围的器件。
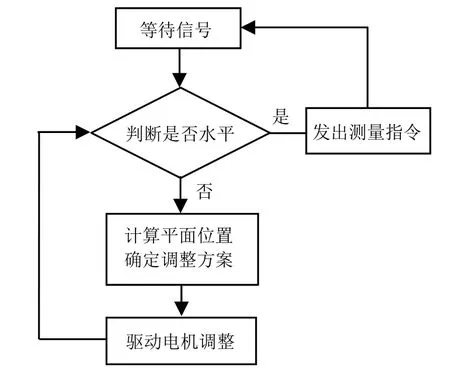
图3 程序框图
水平测量信号处理:从I/O口读取位置信号并转换为位置代码。以水平尺A为例:单片机的P1口的七个引脚分别于尺上的七个传感器相连,如果水泡位于尺的中间,则只有中心的传感器处于导通状态,其它均处于截止状态,相应的P1口上可读到二进制码为0001000(第八位屏蔽),对应位置码为0;如果水泡向左偏少许,则中心点和左侧与之相邻的点处于导通状态,其它均处于截止状态,相应的P1口上可读到二进制码为 0011000,对应位置码为-1。由此可类推得13个状态的位置码:
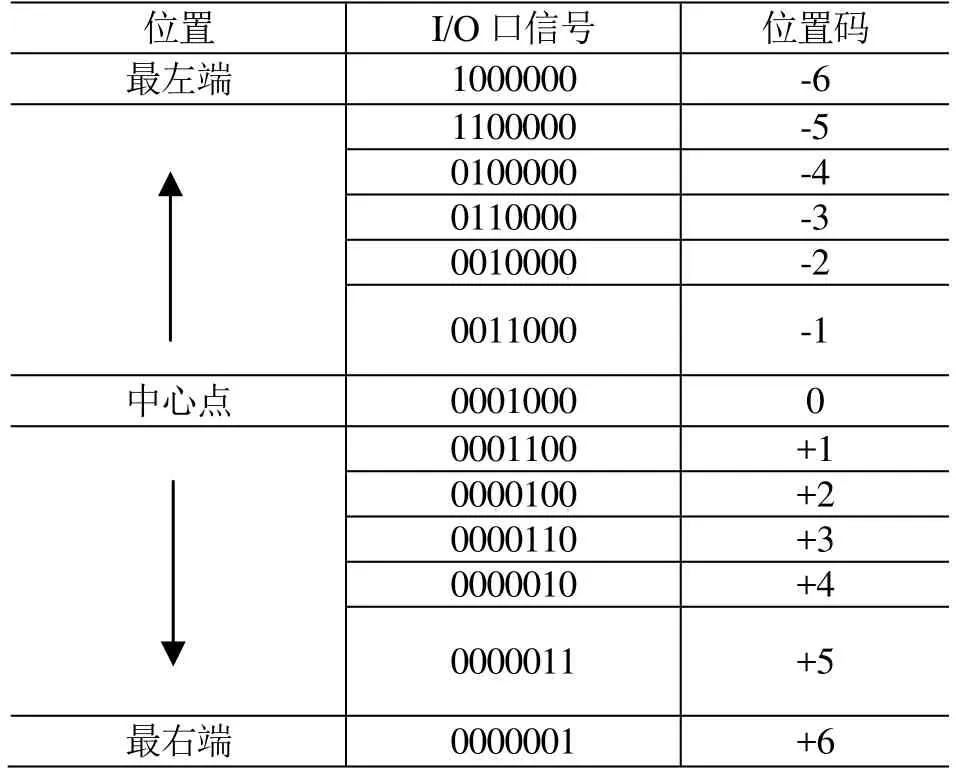
表1 状态位置码
调整方式处理:根据位置代码计算出以何种方式调整平面,生成调整数据,它是程序的关键部分,下面以一个例子来说明它的处理原理。
由图4可见,垂直于水平尺A、B中心的轴线将空间划分为四个象限,箭头所指的点为调整点。假如A、B的水泡垂线的交点位于第三象限且靠近边缘(A尺位置码为-4,B尺位置码为-4),则说明两个调节点均高于水平面,如图5所示。
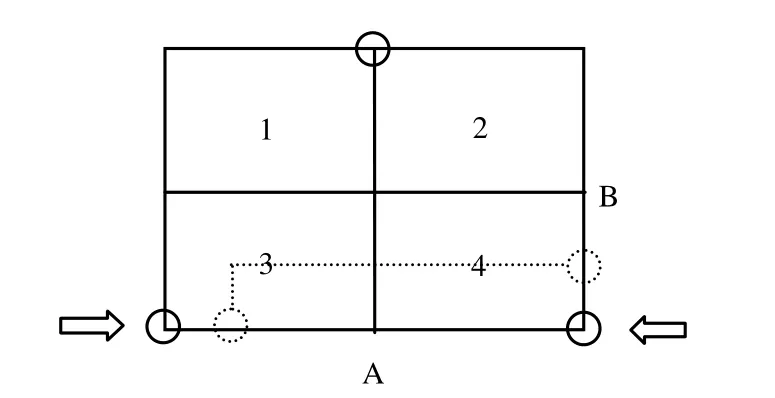
图4 水平尺与象限的关系示意图
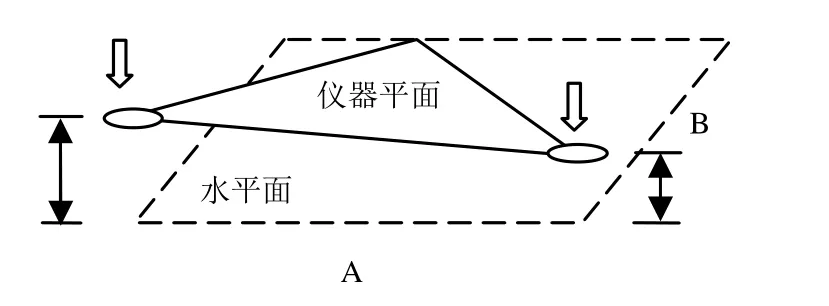
图5 两个调节点均高于水平面示意图
此时的调节方案为:先下降左边的支点,右边支点不动,直到水平尺A的水泡回到中点,此时两边支点再同时下降直至水平尺B的水泡回到中点;如果交点在第三象限且B的水泡靠近中点(A尺位置码为-4,B尺位置码为-1),则说明左边的支点高于水平面,而右边的支点低于平面,如图6所示。
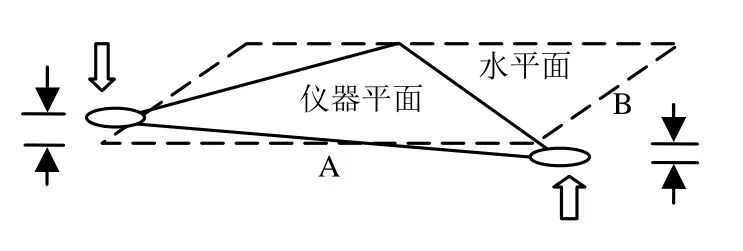
图6 两个调节点分别位于水平面上下方示意图
此时的调节方案为:左边支点下降同时右边支点上升,直到水平尺A的水泡回到中点,此时两边支点再同时下降直至水平尺B的水泡回到中点。在这个过程中,调整方式模块根据水泡的位置调整电机的转速和信号采样的间隔[5],当水泡在边缘时电机以较高的转速调节,水平尺信号的采样间隔为 1s左右;当水泡靠近中心时电机速度下降,且采样间隔缩短为0.1 s~0.5 s。
电机驱动信号处理:把调整好的数据转换成脉冲信号[6],驱动电机。
3 结束语
基于成本和维护方便考虑,本系统的测量模块未采用高精度的倾角传感器,但其调整精度仍可满足全站仪的正常使用。本系统的安装比较简单,只需将测量模块固定于全站仪上,并与仪器的水泡校正,把调整模块分别放在三脚架的任意两只脚下即可。使用时操作人员先将全站仪的水平大致调好后就可离开,在离开浮盘后通过遥控启动系统。系统将在调节完成后启动测量信号发给全站仪或上位机。这样操作人员就无需留在罐内等待,也避免了测量过程中可能引起的晃动。调整后的水平安定面在一般情况下不会发生变化,故本系统在测量过程中不再监测水平面。若需进一步的实时监测和报警则只需修改程序的流程就可完成。本系统也可应用于其他需要水平调节的三点支撑的设备。
[1]欧同庚等.水平面基准系统的自动调平方法研究[J].大地测量与地球动力学,2008.10.
[2]强锡富.传感器[M].北京:机械工业出版社,2004.
[3]庞振基,张弼光.仪表零件及结构[M].天津:天津大学出版社,1990.
[4]李朝青.单片机原理及接口技术[M].北京:北京航空航天大学出版社,1994.
[5]孙亮,杨鹏.自动控制原理[M].北京:北京工业大学出版社,1999.
[6]张国雄,金篆芷.测控电路[M].北京:机械工业出版社,2000.
猜你喜欢
北京测绘(2020年12期)2020-12-29 01:37:18
工程与建设(2019年3期)2019-10-10 01:40:18
小学生(看图说画)(2018年12期)2018-12-04 09:23:16
疯狂英语·新悦读(2018年6期)2018-08-25 06:24:48
特别健康(2018年2期)2018-07-14 04:39:14
中学数学杂志(高中版)(2016年6期)2017-03-01 18:51:01
中学生数理化·高一版(2016年2期)2016-05-30 10:48:04
电测与仪表(2016年9期)2016-04-12 00:29:52
江苏调味副食品(2015年1期)2015-02-28 01:56:37
新高考·高一物理(2014年1期)2014-09-18 15:33:33