
直升机侧翼法伴随护航反潜作战使用方法及其仿真
2011-03-07 06:20:20丛红日沈培志王伟
舰船科学技术 2011年3期
丛红日,沈培志,王伟
(海军航空工程学院指挥系,山东烟台 264001)
1 舰载反潜直升机伴随护航反潜的特点
护航反潜是航空反潜作战的一种重要战斗活动方法,其主要任务是使我编队免受敌潜艇的威胁,保障我编队的安全[1]。
由舰载反潜直升机进行伴随护航反潜时,编队是舰载反潜直升机反潜防护的对象。同时,编队中的水面舰艇又是反潜直升机的载舰,为反潜直升机提供起降平台和保障基地,从而有效克服了反潜直升机留空时间短、作战半径小的弱点。伴随护航反潜时,需要反潜直升机与编队之间密切进行协同。
由舰载反潜直升机进行伴随护航反潜时,可以采用巡逻反潜、应招反潜等多种战斗活动方法,但根据护航反潜的特点,通常由反潜直升机在水面舰艇编队周围受敌潜艇威胁最大的方向建立反潜巡逻线。其中,如果在编队前方建立反潜巡逻线,就称为前置法;如果在编队侧翼建立反潜巡逻线,就称为侧翼法[1]。
由于我编队通常处于持续运动过程之中,因此,护航反潜时,反潜巡逻线也必须随编队一起移动。综合考虑反潜直升机各种搜潜装备的技战术特点,通常使用吊放声呐建立动态反潜巡逻线。
2 舰载反潜直升机侧翼法伴随护航反潜作战使用方法
2.1 侧翼法护航反潜的基本方法
海上编队在航渡过程中,敌潜艇威胁有时来自编队侧翼,为应对这种威胁,当判断侧方有可能受到敌潜艇威胁时就需要采用侧翼法进行护航反潜。侧翼法就是反潜直升机位于编队侧翼,对编队进行侧向防护。此时,应以编队为基准,在敌潜艇攻击武器最大射程之外的编队侧翼设置反潜巡逻线。
2.2 侧翼法护航反潜的同步方法
由于我编队通常处于运动过程之中,显然,反潜巡逻线与编队之间应保持同步运动,即反潜巡逻线运动的方向和速度应该与编队运动的方向和速度保持一致,使反潜巡逻线与编队之间的相对位置始终保持一致,这样,反潜巡逻线才能始终对编队进行有效防护,始终保证编队的对潜防御安全。
反潜巡逻线在运动方向上容易与编队保持一致,只要巡逻线与编队前进方向保持平行即可,但由于反潜直升机与水面舰艇之间在运动特性上存在较大差异,而且反潜直升机使用吊放声呐建立反潜巡逻线时需要周期性地进行悬停,因此,反潜巡逻线要在运动速度上与编队保持一致就比较困难,必须采取适当的战术方法。这是反潜巡逻线与编队之间同步问题的关键。
为达到同步运动的目的,就必须使反潜巡逻线的前进速度vx与编队运动速度vb相等[1],即:

由于直升机使用吊放声呐搜索的有效搜索速度vs大于编队运动速度vb,为了使反潜巡逻线的前进速度与编队运动速度相等,就必须采用一定的战术方法,对有效搜索速度通过一定的调整系数k(0<k<1)进行调整,使得:
根据直升机使用吊放声呐搜索的特点,基本方法是“进三退一”(如图1所示),即直升机每连续悬停探测3次,就需要后退到上一个悬停点的位置再继续进行悬停探测,如此反复。这样,除了最初的2个悬停探测点外,后续的每个悬停探测点都将经过2次探测,通过巡逻线的动态重叠,既解决了同步问题,又提高了搜潜效能,一举两得。
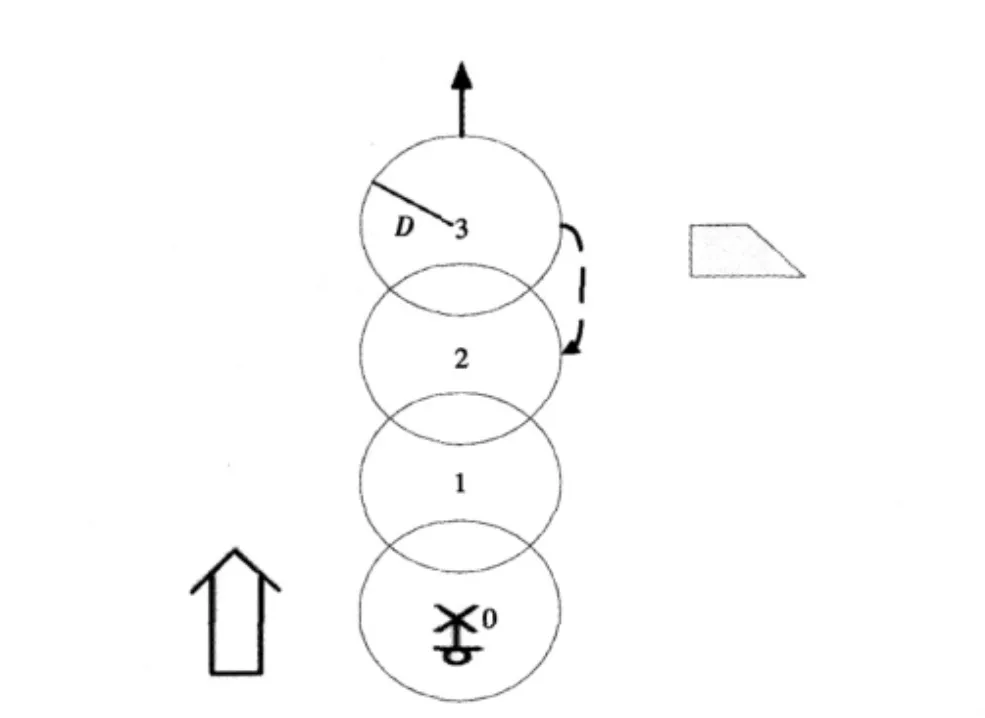
图1 侧翼法时反潜巡逻线与编队同步方法示意图Fig.1Schematic diagram of the synchronization method between antisubmarine patrol line and naval formation when flank escorting
3 仿真模型建立
3.1 效能指标及其影响因素分析
直升机采用侧翼法伴随护航反潜时,核心任务是进行搜索,为编队提供对潜预警。因此,最主要的效能指标是搜索概率P[2]。此外,巡逻线的长度L越长,搜索范围就越大,也是一个重要的效能指标。
影响P的因素比较复杂,由于使用吊放声呐建立巡逻线,主要包括:吊放声呐的有效探测距离D、相邻悬停探测点之间的间距d、直升机转移探测点时的飞行速度vz、每一个探测点的听测时间tj、收放吊放声呐所用的时间ts、敌潜艇航速vq、敌潜艇航向θ等,此外,机组训练水平、敌潜艇的情况(噪声级、作战使用方法等)、水文环境、气象条件等,也影响Ps。其中,在作战过程中,d是影响P的主要因素[2]。
而L则主要由D,d以及搜索方法决定。
在具体作战过程中,D,vz,ts通常都是确定的,vq,θ可以进行假定,为了保持同步,tj与d密切相关,因此,d是影响P和L的主要因素。
3.2 巡逻线长度
从图1可知,在任意时刻,巡逻线的长度为连续3个悬停探测点所形成的搜素区域的长度,因此:

其中,根据战术原则,d的取值范围通常在D和2D之间,即D≤d≤2D。
3.3 同步控制
保持反潜巡逻线与编队之间同步的基本方法是“进三退一”,但在具体应用时,为了精确保持同步,还必须进行控制。
由于直升机使用吊放声呐探测具有明显的周期性,而编队的运动是连续的,因此,只需分析1个同步周期的情况即可。所谓同步周期,就是反潜直升机“进三退一”的时间周期。
设:编队航行时间用tb表示,直升机使用吊放声呐巡逻搜索的时间用th表示,收放吊放声呐所用的时间用ts表示,转移探测点所用的时间用tz表示,监听吊放声呐所用的时间用tj表示。
从图1可知,从探测点0开始,当编队前进至悬停探测点2所对应的位置时,直升机经过了“进三退一”的过程应重新回到悬停探测点2,此时:

而直升机已经进行了4个悬停探测点的探测,因此:

其中,如果不考虑气象条件对转移探测点航路的影响,可以近似地认为[3]:
式中,vb,vz,ts在具体的作战过程中通常可以取固定值,而tj是直升机的有效工作时间,其取值范围是可控的,因此,可以通过调整tj的取值来保持同步。

使用上式就可以根据d的取值科学确定tj的取值,从而能精确保持同步。
3.4 坐标系建立及探测点位置的表示
以直升机当前悬停探测点的位置为基准建立平面直角坐标系,如图2所示。由图2可知,初始探测点的坐标为(D,D),探测点1的坐标为(D,D+d),探测点2的坐标为(D,D+2d),探测点3的坐标为(D,D+3d)。
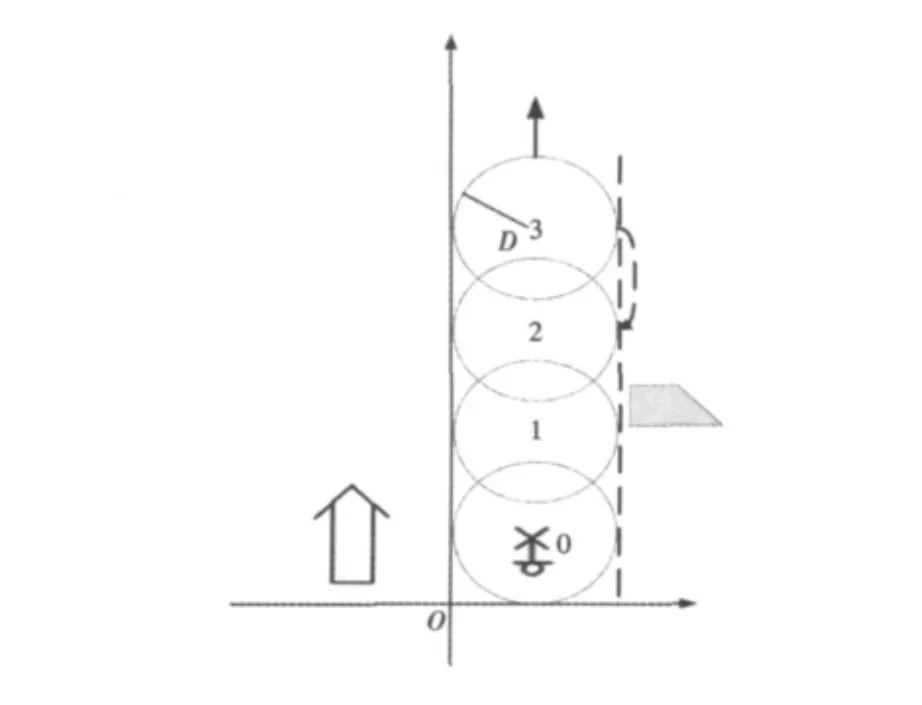
图2 探测点位置的坐标表示Fig.2Schematic diagram of the coordinate expression method of the location of detection points
3.5 敌潜艇位置表示
1)敌潜艇初始位置分布
当敌潜艇距离我反潜巡逻线还较远时,对搜索没有影响,编队、巡逻线和敌潜艇都继续运动,只有当敌潜艇运动到即将进入到反潜巡逻线的搜索范围时,如图2的虚直线所示,再继续运动才有可能进入反潜巡逻线的搜索范围。因此,如果不考虑敌潜艇的潜深,敌潜艇初始位置的坐标可以表示为(2D,y0)。其中,可假设y0在L的范围内服从均匀分布,需要使用随机数来生成。设服从均匀分布的随机数为ξ1,且0≤ξ1≤1,则:

2)敌潜艇航向分布
由于常规潜艇的航速低于水面舰艇编队的航速,所以常规潜艇无法追赶水面舰艇编队,因此,敌常规潜艇如果能对我编队构成威胁,只可能采取朝向我编队内后方的航向,因此:

在此范围内,可假设θ服从均匀分布,因此也需要使用随机数来生成。设ξ2为服从均匀分布的随机数,且0≤ξ2≤1,则:

3)敌潜艇运动方程
如果敌潜艇不改变运动状态,则敌潜艇的运动方程为:

这样就可以确定任意时刻敌潜艇的位置坐标。
3.6 探测效果判别
仿真时,对每一次仿真过程,都要进行探测效果的判别。根据直升机使用吊放声呐搜索的原理,基本的判别方法为:在每一时刻,分别确定敌潜艇的位置和直升机的探测位置,并计算两者之间的距离Dqz,如果Dqz>D,则敌潜艇没有进入吊放声呐的有效探测范围,无法探测到敌潜艇;如果Dqz≤D,则敌潜艇进入了吊放声呐的有效探测范围,就有可能探测到敌潜艇,当然,在此前提下,能否探测到敌潜艇,还要受监听能力、悬停探测点位置误差、探测海区水文条件等因素制约,如果忽略这些因素的影响,则可以认为敌潜艇进入了吊放声呐的有效探测范围就探测到了敌潜艇[4]。然后,再进行下一个时刻的判别,直至当前同步周期结束。然后,通过对所有仿真过程的统计,就能计算出P。
显然,确定每一时刻敌潜艇的位置和直升机的探测位置是探测效果判别的关键[5]。
对每一次仿真,敌潜艇的运动是连续的,而且假定其中途不改变运动状态,每一时刻的位置容易确定。但反潜直升机使用吊放声呐探测时,其探测过程是断续的,而且由于需要采用“进三退一”的方法与编队保持同步,其位置的确定就比较复杂。
由于采用“进三退一”的方法,综合考虑当前同步周期、上一个同步周期和下一个同步周期的情况,每个探测点(整个搜索过程中最初和最后2个探测点除外)都先后经过2次探测,如图3所示。显然,直升机按照…-2,-1,0,1,0,1,2,3,2,3,4,5…的顺序依次探测,当前同步周期的0,1,2,3这4个探测点都经过了2次探测。其他同步周期的情况也相同。
而在每一个探测点,在由ts,tj,tz所组成的探测周期内,只有tj属于有效工作时间,如图4所示。
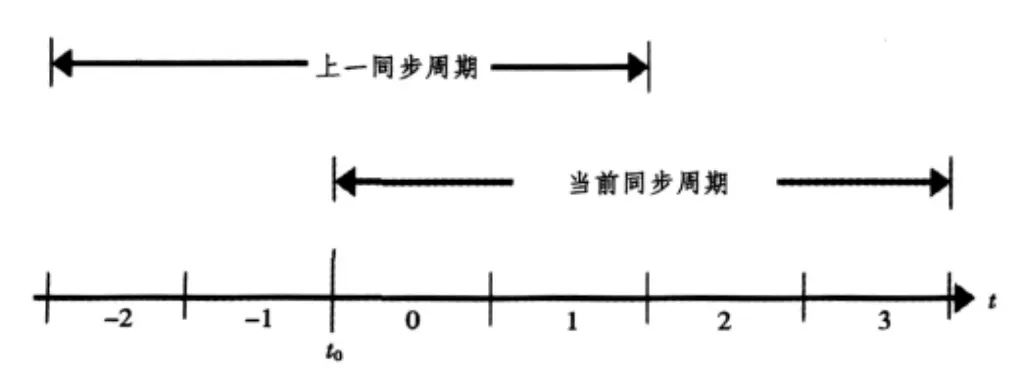
图3 “进三退一”探测点顺序示意图Fig.3Schematic diagram of the“go ahead three paces and then go back one pace”detection points sequence
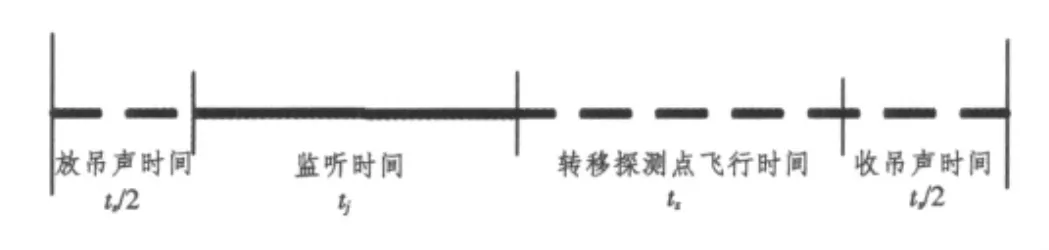
图4 直升机使用吊放声呐探测有效探测时间示意图Fig.4Schematic diagram of the effective detection time when a helicopter detects with dipping sonar
因此,只需要在每个探测点的有效探测时间进行探测效果的判别即可。这样,就可以大幅降低仿真计算量,提高仿真效率。
4 仿真
4.1 仿真想定
我水面舰艇编队航速为××kn。
反潜直升机为××型,转移探测点时的飞行速度为××km/h。吊放声呐型号为××型,其有效探测距离为××km。在每个悬停探测点收放吊放时间为××min。
敌潜艇为常规动力潜艇,型号为××,航速为×× kn。
4.2 仿真程序
仿真程序框图见图5。
图中,K为吊放声呐有效探测距离的倍数;t为当前时间;n和N分别为当前的仿真次数和最大仿真次数;m为探测到敌潜艇的次数。
仿真程序使用C++语言实现。N设定为10 000次。
4.3 仿真结果
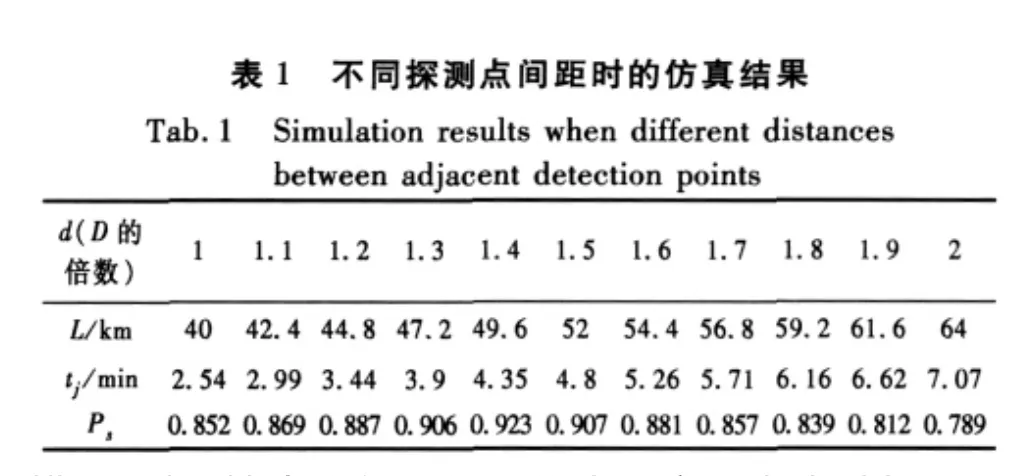
不同探测点间距时的L、为了保持同步所需要的tj,Ps的仿真结果见表1。
4.4 仿真结果分析
从仿真结果可以看出,d越大,则L和tj也越大。但P与d之间的关系比较复杂,随着d的增加,P先上升然后下降,大约在d=1.4D时,P最大。这为作战使用提供了重要依据。
5 结语
舰载反潜直升机伴随护航反潜时,关键是要保持反潜巡逻线与编队之间的同步。针对反潜直升机使用吊放声呐进行侧翼法伴随护航反潜的特点,提出了以“进三退一”为核心的同步方法并建立了相应的同步模型,进而通过对每个悬停探测点监听时间的调整来进行精确的同步控制。在此基础上,通过建立仿真模型,对其搜索效能进行了仿真研究。为直升机采用侧翼法进行伴随护航反潜的作战使用提供了理论依据。当然,在实际应用时,还需要飞行员具备比较高超的飞行技术,这就需要开展有针对性的训练,不断提高反潜直升机与载舰之间的协同能力。

图5 仿真程序框图Fig.5Logic block diagram of the simulation program
[1]丛红日.航空反潜战术[M].海军航空工程学院,2008.
CONG Hong-ri.Aviation anti-submarine tactics[M].Naval Aeronautical Engineering Institute,2008.
[2]孙明太,王涛,赵绪明.反潜直升机吊声搜潜效能的建模仿真[J].火力与指挥控制,2005,30(3):33-36.
SUN Ming-tao,WANG Tao,ZHAO Xu-ming.Modeling and simulation the efficiency of the dipping sonar on the antisubmarine helicopter[J].Fire Control and Command Control,2005,30(3):33-36.
[3]郭辉,钱学东,刘启军.直升机吊放声呐搜潜机动建模仿真[J].指挥控制与仿真,2009,31(1):87-89.
GUO Hui,QIAN Xue-dong,LIU Qi-jun.Modeling and simulation of helicopter maneuver in antisubmarine search operation by dipping sonar[J].Command Control&Simulation,2009,31(1):87-89.
[4]丛红日,周洪峰,张海峰.直升机检查性反潜时吊放声呐搜潜效能研究[J].海军航空工程学院学报,2007,22 (3):577-580.
CONGHong-ri,ZHOUHong-feng,ZHANGHai-feng.Research on searching effectiveness model of dipping sonar in checking anti-submarine of helicopter[J].Journal of Naval Aeronautical Engineering Institute,2007,22(3):577-580.
[5]王晓辉,陈建勇,赵红军.直升机吊放声呐搜索方法效能研究[J].火力与指挥控制,2009(9):18-20.
WANGXiao-hui,CHENJian-yong,ZHAOHong-jun.Research on effectiveness of dipping sonar search algorithm for submarine[J].Fire Control and Command Control,2009(9):18-20.
猜你喜欢
中学生数理化·八年级物理人教版(2022年9期)2022-10-24 07:03:52
小哥白尼(军事科学)(2022年1期)2022-04-26 14:02:42
海洋信息技术与应用(2020年3期)2020-08-24 07:25:10
小学科学(学生版)(2019年10期)2019-11-16 08:55:14
小哥白尼(趣味科学)(2019年6期)2019-10-10 01:01:38
实用口腔医学杂志(2019年4期)2019-08-22 02:51:46
小学科学(学生版)(2019年6期)2019-07-10 00:52:16
无人机(2017年10期)2017-07-06 03:04:38
山东工业技术(2017年10期)2017-05-31 03:16:43
声学技术(2014年1期)2014-06-21 06:56:32
