
空空导弹制导控制系统虚拟样机的研究与实现
2011-03-01 06:11:00宋晓玲李友年
电光与控制 2011年10期
王 霞, 宋晓玲, 李友年
(1.中国空空导弹研究院,河南洛阳 471009;2.洛阳理工学院,河南洛阳 471023)
0 引言
虚拟样机技术(Virtual Prototype,VP)是以相似原理、控制理论及其相关的专业技术为基础,结合成熟的计算机技术形成的一种数字化设计方法[1]。利用虚拟样机技术可以在功能和行为等方面对真实系统进行模拟,并可在虚拟样机环境下进行系统优化设计与评估工作,从而缩短产品的研制周期,降低研制成本,提高产品的竞争力[2]。
随着仿真技术的发展,虚拟样机技术在国内外有着广泛的研究与应用,如采用虚拟样机技术进行月球机器人运动仿真、飞行器分布仿真、导弹系统仿真等[3]。
采用虚拟样机技术,建立了导弹制导控制系统仿真平台,系统验模后,在该平台上进行系统性能仿真评估与优化设计,为导弹研制各个阶段的发射试验提供了有力的支持。
1 制导控制系统虚拟样机的总体设计
从设计开发与仿真运行两个方面,对导弹制导控制系统虚拟样机进行总体设计。如图1所示,设计要素包括[4]:仿真平台软件框架、仿真模型库系统,仿真数据库系统、可视化子系统、硬件平台及显示设备等。其中,仿真平台软件框架是构成空空导弹制导控制系统虚拟样机的关键部分,用于虚拟样机的建模和仿真;仿真模型库包括外部环境模型以及用户自定义的单元模型;仿真数据库提供数据存储和管理服务。

图1 制导控制系统虚拟样机总体设计示意图Fig.1 Virtual prototype model framework of guidance and control system
导弹制导系统虚拟样机开发步骤:首先通过开发环境建立单元模型、用户自定义模型并入库,尽可能复用仿真模型库中的单元模型;其次通过仿真平台软件框架,调用仿真模型库中的单元模型,建立导弹制导控制系统的虚拟样机模型;通过仿真试验对虚拟样机模型进行验证;验模完成后,利用虚拟样机对导弹制导控制系统进行设计、仿真与评估,及时修改设计中的问题,对系统进行优化设计,确保系统性能满足设计要求。
2 系统建模与集成
2.1 虚拟样机导弹的建模原则
在制导控制系统虚拟样机建模初期,遵循充分借鉴已有的设计经验、同时又便于系统的优化设计的原则,对系统模型进行模块化、层次化和通用化设计。在设计过程中,系统建模应遵循以下原则[5-6]:
1)模块化设计,即按照导弹的物理结构进行建模,模块的物理意义清楚,输入、输出变量明确,利于模型的理解、建模、优化设计,同时也便于模型的校核和系统的集成,模块应具有相对独立性,尽量减少模块之间的铰链信号;
2)层次化设计,即对系统模型进行分层,每一层模型可以通过下层基本模型构建,整个模型成树型结构;
3)通用化设计,将具有共性的部分建成通用化模块,以方便其重复使用,各个模块的输入输出接口关系采用通用、标准化的形式,使模块可以方便地更换,便于系统的扩展。
2.2 虚拟样机的建模
导弹制导控制系统是一个复杂的多回路控制系统,它包括导引回路、飞行控制回路等主要分系统[7]。制导系统功能图如图2所示。
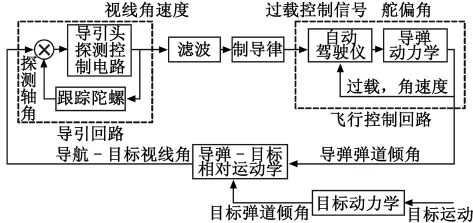
图2 制导系统功能图Fig.2 Guidance system function diagram
根据虚拟样机建模原则及制导系统的功能,将虚拟样机划分为制导控制模型(feikong)、弹体模型、相对运动模型(rel)、传感器模型、逻辑时序控制模型以及初始化模型和结束模型,整个模型呈树形结构,如图3所示。

图3 导弹制导控制系统虚拟样机模型结构图Fig.3 Virtual prototype model framework of guidance and control system
制导控制模型分为控制模型和制导模型。目前,制导模型只有红外成像导引头模型,其功能为根据来自目标的能力自动截获跟踪目标,并给控制模型提供制导律所需的视线角速度、导弹-目标相对运动信息等。
在实战过程中,导弹攻击目标时一般都存在抗干扰问题。在一般的数字仿真环境中,由于没有图像模型、详细的干扰运动模型及抗干扰算法,难以高逼真度地仿真对抗干扰过程。在虚拟样机制导模型中,引入了红外成像图像模型、详细的干扰弹模型及抗干扰算法,可以仿真并实时显示导弹抗干扰的全过程。
控制模型分为滤波算法、控制算法(制导律)、稳定算法及舵机等模型,其中稳定算法模型和舵机模型又称为自动驾驶仪。控制系统的作用是接收导引头输出的信息,进行滤波,采用合适的导引律,实现对目标的自动跟踪[8]。同时保证导弹飞行姿态的稳定,输出舵偏角。
为保证在大攻角、大过载、强耦合飞行条件下,导弹能够获得良好的动态品质和稳定性,在控制系统设计中采用倾斜转弯技术、变结构控制及直接力/推力矢量复合控制等方法,对导弹俯仰、偏航及横滚等3个通道进行设计。
为了实现大离轴发射及对大机动目标的精确打击,采用具有最优滤波性能的扩展卡尔曼滤波算法,对弹目相对运动信息进行滤波,在增广比例导引律的基础上,在红外空空导弹中引入弹目相对运动速度、加速度等信息,形成适用于大离轴发射、大机动目标的制导律。
弹体模型分为弹体动力学和弹体运动学模型。其中,弹体动力学模型根据舵偏角及攻角等信息,按照气动吹风数据,插值计算出导弹当前所需的气动力和力矩。将结果传递给弹体运动学模型。弹体运动学模型实时解算导弹六自由度飞行参数。
根据弹体模型输出的信息,通过导弹-目标的相对运动,将导弹-目标视线角及相对运动信息反馈给导引头,实现系统的闭环控制。
逻辑时序控制模型通过生成与工作时序相关的标志、变量,实现对不同模型的合理调度。
所有模型存入虚拟样机的模型库。在导弹研制的不同阶段,针对不同的模型进行设计与验模,随导弹研制的深入而不断深化和细化[9]。在进行新型导弹的研制时,对通用模型可以直接调用,对个别要修改参数的模型可以直接修改,几大模型经过简单的修改可以集成不同导弹的设计方案。
2.3 系统集成
导弹研制一般分为论证阶段、方案阶段、工程研制阶段、设计定型阶段和生产定型阶段。其中,方案阶段即展开原理样机的研制。在导弹研制的不同阶段,先后实现了程控弹、制导弹制导控制系统虚拟样机。集成后的虚拟样机如图4所示,具有如下特点:
1)具备较为完善的仿真调试功能;
2)具备完善的分层建模功能,且各层模型可设置不同的仿真步长;
3)同半实物仿真相比,虚拟样机中引入全局变量,通过设置不同的初始仿真条件,可以进行多条件仿真,一次能够连续对几百组弹道进行批量仿真,大大提高了仿真效率;
4)同一般的数字仿真相比,虚拟样机平台引入红外成像的图像模型及抗干扰算法,能够以图像方式,实时显示导弹-目标攻击的全过程;
5)针对虚拟样机输出的数据格式,开发专用的仿真数据批处理画图软件,如图5所示,该软件具有放大、缩小、取点等功能,能够同时输出一条或者多条曲线,便于对仿真结果进行分析。

图4 制导控制系统虚拟样机Fig.4 Virtual prototype for guidance and control system
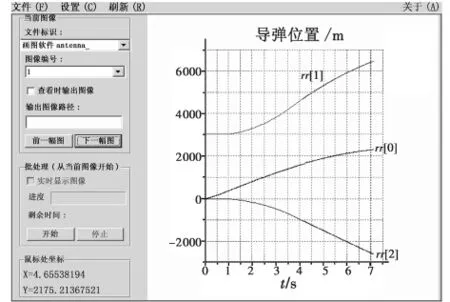
图5 数据批处理软件界面Fig.5 Interface of data batch management software
在确保模型正确的基础上,利用该虚拟样机开展了以下工作:
1)制导控制系统全空域稳定性分析;
2)外场靶试条件预测仿真研究及靶试后复现研究和数据分析;
3)确定制导控制系统攻击区;
4)制导控制系统的制导精度评估;
5)开展滤波算法、导引律的研究;
6)根据靶试结果,对制导控制系统虚拟样机进行优化设计;
7)对抗干扰算法进行评估和优化。
2.4 仿真结果
针对某抗干扰靶试条件,在空空导弹制导控制系统虚拟样机环境下进行六自由度仿真,仿真条件为:导弹低空上射,目标具有机动逃逸的典型条件,具体拦截条件为:导弹初始发射高度3 km,发射Ma=0.8,斜距4 km;目标初始高度6.5 km;目标机动4g;目标高低角60°,方位角 60°,目标 Ma=0.74,目标在 X、Z 两个方向进行机动。导弹发射后7.12 s命中目标,此时脱靶量为0.35 m,导弹末速为688 m/s,仿真可在几秒内完成。仿真结果如图6~图9所示。
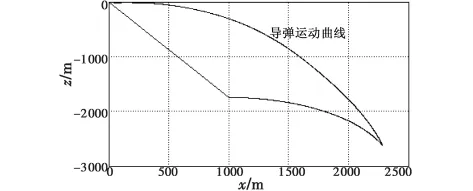
图6 水平面导弹目标相对运动曲线Fig.6 Missile-target relative moving curve in horizontal plane
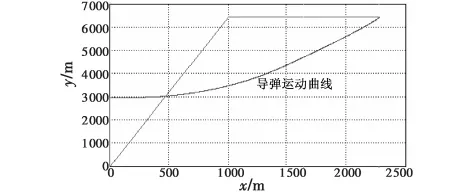
图7 垂直平面导弹目标相对运动曲线Fig.7 Missile-target relative moving curve in vertical plane
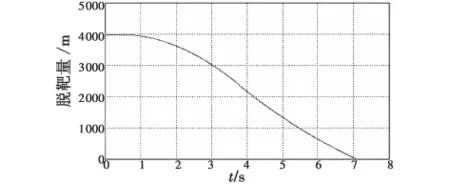
图8 脱靶量Fig.8 Miss distance
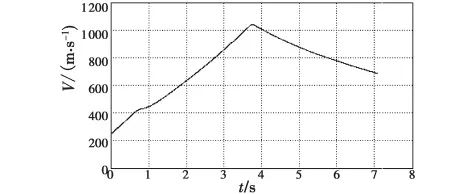
图9 导弹速度曲线Fig.9 Velocity curve of missile
同时进行半实物仿真试验,对该条弹道进行一次仿真通常需要30~60 s左右的时间。根据干扰弹投放模式不同,分两组进行试验,每组试验重复10次,结果为:遇靶时间平均7.11 s,脱靶量分布为0.3 ~2.52 m,末速平均为688 m/s。针对该条件的空中靶试试验,导弹直接命中靶标。
3 系统验模
虚拟样机要求能比较真实地模拟实际的产品或过程,如果模型不能准确真实地代表实际的系统,那么利用它产生的结果也就根本不可信。因此,模型验证是虚拟样机中非常重要的环节。主要从两个层次进行验模。
1)模型验证。通过对制导控制系统各个子模型的输入、输出数据比较来验证模型的正确性,确定各子系统模型能否代表真实的系统,如果每个子系统与真实部分的误差很小,精度足够高,则认为虚拟样机是正确的。
2)仿真结果验证。利用所生成的虚拟样机,开展制导控制系统仿真。根据仿真结果评估虚拟样机是否有足够的精度。
理论上,要通过大量外场试验以获取大量的试验数据作为虚拟样机评估及校验的标准,为了简化验证过程,采用半实物仿真的结果作为参考,针对影响系统性能的重要参数,与虚拟样机的数据进行比较。如果虚拟样机仿真数据和半实物仿真数据基本一致,则说明虚拟样机建模正确,仿真结果可靠。
同时,在进行靶试试验后,将靶试条件代入虚拟样机环境进行仿真,将靶试数据与仿真数据进行比较,对虚拟样机进行校核与优化设计。
图10给出某次制导弹发射试验数据与虚拟样机仿真数据的速度对比曲线,二者基本一致,表明虚拟样机建模正确。
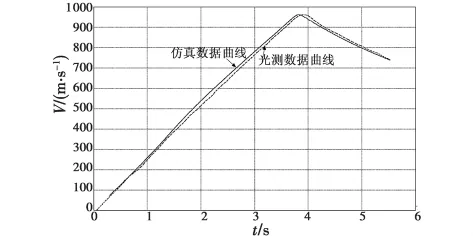
图10 速度曲线对比Fig.10 Contrast of velocity curve
4 结束语
研究实现了空空导弹制导控制系统的虚拟样机,利用该虚拟样机进行了制导控制系统的优化设计及性能评估工作,缩短了产品的研制周期,设计质量和效率得到极大的提高。今后将在抗干扰模型优化设计及性能评估、高拟真度虚拟样机的建模及模型校验技术等方面开展工作。
[1]易华,谢希权.机载多目标攻击武器系统虚拟样机研究[J].电光与控制,2001(4):39-43.
[2]刘海军.高度导弹末制导虚拟样机系统设计、建模及校验[J].现代防御技术,2004,32(12):33-37.
[3]万晓峰,刘更,杨树森.航炮系统的虚拟样机仿真与分析[J].系统仿真学报,2005,17(10):2392-2394.
[4]刘刚,王行仁,贾荣珍.飞机动力学虚拟样机技术[J].航空学报,2005,26(5):550-555.
[5]周振浩,张淑丽.虚拟样机导弹系统的建模方法和模型确认[J].计算机仿真,2004,21(10):18-20.
[6]黄志理,郑志伟,赵华超,等.空空导弹虚拟样机建模初探[J].弹箭与制导学报,2008,28(1):7-10.
[7]梁晓庚,王伯荣,余志峰,等.空空导弹制导控制系统设计[M].北京:国防工业出版社,2006.
[8]陈涛,张文翰,郭立民,等.基于Simulink和HLA的导弹制导控制系统仿真[J].弹箭与制导学报,2010,30(5):13-16.
[9]宋龙,张文山,靳凌.空空导弹飞控软件研制中的虚拟样机应用[J].计算机仿真,2005,22(5):19-24.
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08 02:42:40
装备制造技术(2020年4期)2020-12-25 05:26:04
军事文摘(2020年14期)2020-12-17 06:27:16
兵器知识(2019年1期)2019-01-23 02:20:44
小哥白尼(趣味科学)(2018年5期)2018-06-21 06:24:38
军营文化天地(2017年12期)2017-03-01 06:52:11
时代农机(2016年6期)2016-12-01 04:07:20
北京航空航天大学学报(2016年9期)2016-11-16 02:02:36
北京航空航天大学学报(2016年7期)2016-11-16 01:51:00
北京航空航天大学学报(2016年4期)2016-02-27 06:32:09
