
基于双目立视技术的开关电弧图像处理
2011-02-19 12:22王静红刘教民
电工技术学报 2011年1期
王静红 刘教民
(1.河北师范大学信息技术学院 石家庄 050016 2.河北工业大学智能电器研究所 天津 300130)
1 引言
电弧是电器产品使用中不可回避的一种现象,电弧的产生对电器触头的侵蚀严重,甚至会烧毁触头或使触头熔焊,造成可靠性降低或接触失效,缩短电器的使用寿命。对电弧燃烧过程和燃烧机理的的认识,可以进一步提高电器产品的设计水平,改进触头材料的性能和灭弧装置的结构,提高产品的灭弧性能,缩短燃弧时间,提高产品的使用寿命和可靠性[1-4]。
本文提出通过高帧频面阵双CCD 照相机拍摄了低压电器开关电弧从燃弧到灭弧整个的动态过程图像,研究电弧的运动图像就可以分析电弧的运动轨迹,可以从不同角度观察电弧整体运动情况[5-6]。
本文主要研究的是,在电弧图像的高速动态采集过程中,由于采集速度高、CCD 曝光时间非常短、开关电器分断电路过程中存在较强的电磁辐射,电弧图像信号采集与传输过程受多种因素影响,电弧图像中不可避免地受到来自各个方面的噪声影响。需要进行图像处理技术,把电弧图像所具有的有用信息提取出来,比如:从电弧图像中提取弧柱特征信息,供研究人员观察、分析。因此,本文图像处理主要采用了支持向量机高斯核的电弧图像边缘检测技术,并实际应用于低压电器开关电弧图像采集处理与可视化仿真系统中。
2 开关电弧图像采集系统
为了提高整个测试系统的时间和图像空间分辨率,在保证传输速率的前提下尽可能提高图像的空间分辨率和灰度等级。该电弧图像采集系统采用 64×64 像素的256 级灰度等级的CCD 器件,它的时间分辨率可达1 万帧/s。
系统采用两个波长不同的滤光片、双面阵CCD组成,两个CCD 器件平行放置,低压电器灭弧室选择封闭型,当电气回路被断路器分断时,断路器动触头和静触头之间产生电弧,由实验装置对分断电弧的运动进行观察。将断路器灭弧室侧面相应于触头的位置打开1.5cm×2.0cm 的观察窗。同时,为了便于在较小的低压电器触头附近进行拍摄,双CCD前端分别采用直管纤维镜,其直径仅有φ 2mm(或φ 4mm),视角范围60°。直管纤维镜通过卡口与析光镜相连。采用析光镜的目的是使观察者通过目镜可以看到被测物体,在正式拍摄电弧前,通过目镜观察,调整CCD 成像焦距以得到清晰的电弧图像。同时析光镜不影响电弧产生的光通过透镜传给CCD 芯片,使其在CCD 上产生图像。
CCD 芯片上接收电弧光信号后,将二维光学图像信号转变为一维视频信号,再经高速A/D 转换器变为数字量信号以 RS−422 通信方式输出。由于CCD 图像数据输出速率比较高。在最高速率拍摄电弧图像时计算机总线直接传输数据速率跟不上CCD 发出的数据速率。为了充分发挥CCD 器件性能,设计了图像数据高速传输缓存接口单元。由于每一幅面阵CCD 的电弧图像经A/D 转换后所包含的数据非常大,如果每采集一帧电弧图像便将其传输到计算机,那么,由于数据传输延迟的存在,使得图像数据在传输中出现堵塞现象,数据出现丢失,从而使得采集到的数据不完整,所以,系统必须将连续采集到的电弧图像首先转换成数字信号,然后暂存在数据存储器件中,当电弧熄灭,数据采集完毕后再统一将图像数据传输到计算机中进行处理。
在整个测试电弧的过程中,保证计算机控制CCD 同步拍摄,即燃弧开始时,CCD 必须同步拍摄,否则电弧图像信息有可能丢失,所以设计了同步触发电路。对于不同的低压电器触头电弧的拍摄可归为两类触发电路,一类为被动式触发,如小型断路器等手动切换电器类,在手动电器触头分离产生电弧的同时,触发计算机控制CCD 开始拍摄。另一类为主动式触发单元,如交流接触器、继电器等具有电磁线圈或能进行电动操作的电器,它是由计算机主动发出触发信号控制电器线圈切换触头分离产生电弧,同时控制CCD 开始拍摄。这两种拍摄的图像帧数,可以事先通过计算机软件进行设置。本文研制的开关电弧动态图像双目立视采集系统结构如图1 所示。
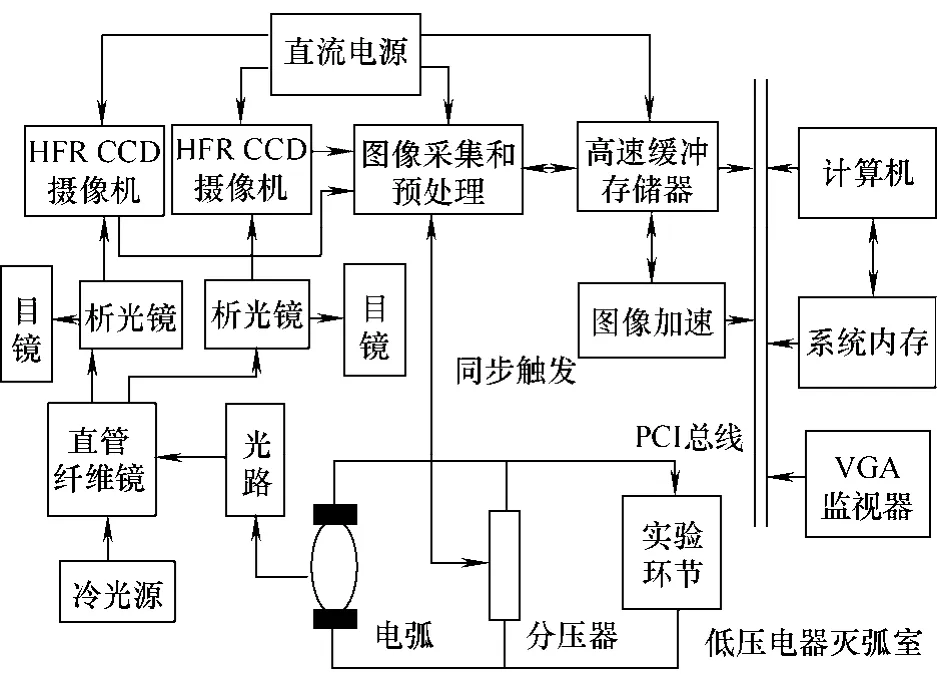
图1 开关电弧图像双目立视采集系统 Fig.1 The system of switching arc on binocular stereo vision
系统性能指标:
直流电源:±15V;(±5±0.5)V;空间分辨率:64×64 点阵;整机电流:I≤1.5A;时间分辨率:3000~10000 帧/s;整机功耗:P≤250W;灰度:δ =256 灰阶;DSP 存储器容量:1~64MB。
总之本采集系统具有图像分辨率高、速度快、DSP 数据存储容量大、DSP 高速缓冲接口单元适应性强和整体性能好等特点。
3 电弧图像边缘检测
由于在图像的传感过程中不可避免地会受到各种因素的干扰,而且电弧的辐射光强度也不稳定,部分电弧辐射较弱,对应到捕捉的电弧图像上表现为信号不强,给准确的检测电弧边缘带来了很大的困难。所以根据电弧图像的这些特点,提出了一种新的边缘检测算法,是基于支持向量机的一种新的边缘检测技术,对电弧图像进行图像处理[7-8],使之更清晰,并全面地保留电弧特征。
3.1 支持向量机(SVM)的基本理论
支持向量机(Support Vcctor Machine,SVM)是20 世纪90 年代Vapnik 基于统计学习理论中的结构风险最小化原理而提出的一种新的学习算法。
SVM 的学习过程在本质上就是一个函数逼近问题,其核函数 k(x,y)的选取对应于函数逼近中基函数的选取。常用的核函数有多项式核函数、径向基核函数(Radial Basis Function,RBF)和Sigmoid核函数(多层感知器:又称Sigmoid 核)等[9-10]。
其中,径向基函数为
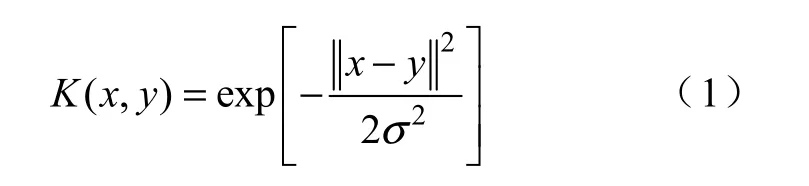
在实际应用当中,需要根据情况的不同选择不同的核函数。由于RBF 核函数具有较好的分类效果,所用时间相对也较短,通常情况下会被首先采用。
3.2 图像边缘检测模型
通过对对象进行测量,可以得到对象的一种描述,即用测量空间中的一个点来代表这个对象。例如通过摄像机可以把一个物体转换为一个二维灰度阵列。这就是所说的数字图像。在大多数情况下,不能直接在这个测量空间中进行分类器的设计。一方面是因为测量空间的维数很高(一个 256×256度阵列图像相当于256×256 维测量空间中的一个点),不适宜于分类器的设计。更重要的是这样的描述并不能直接反映对象的本质。因此,为进行分类器设计,首先通过非线性变换将输入空间变换到一个高维空间,然后在这个新空间中求取最优线性分类面,而这种非线性变换是通过定义适当的内积函数实现的。在本文中,根据采集的电弧图像的特点,采用球体形式的支持向量机来进行分类检测[11]。
3.2.1 分类检测模型
利用高斯核函数把样本空间映射到核空间,在空间找到一个能够包含所有训练数据的一个球体。当判别时,如果测试样本位于这个高维球体中,那么就认为该点为边缘点(正常),否则为非边缘点(异常)。其基本思想是:首先通过核函数将输入空间映射到一个高维空间,在这个高维空间构造一个包含所有训练样本点的球体;在球面上的样本点即为SVDD 所求得的支持向量。
假设Z 为测试样本,当满足如下公式时,即判断Z 是边缘点,否则为非边缘点,相当于Z 落在该球体内部。
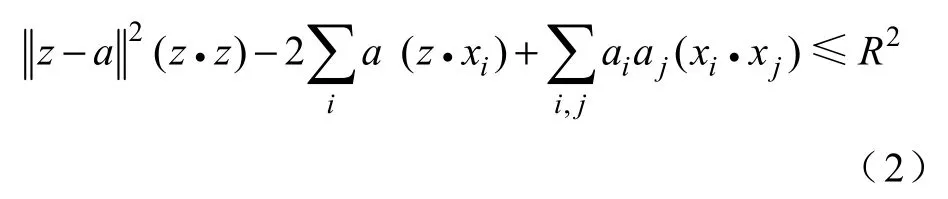

式中,R 是任意一个支持向量xk到球心α 的距离,且 当输入空间的样本点不满足球状分布时,可以通过核技巧把输入空间先映射到高维空间,然后在映射后的高维空间内求解。也就是将上述公式中内积形式都变换成核函数形式

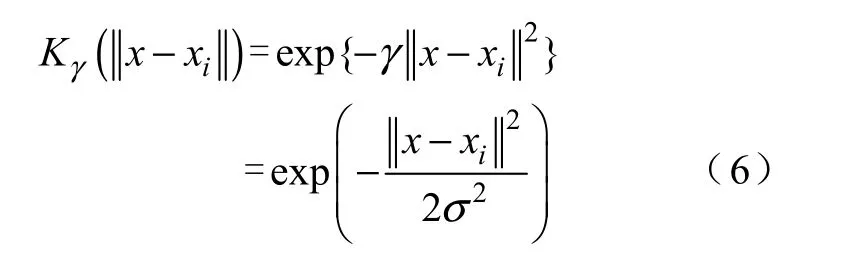
这里选择一个恰当的核函数是比较重要的,如果选取的核函数能够将输入空间正好映射成高维空间的一个球体分布,那么所求的分类器也比较吻合实际的分布情况。在系统中,采用高斯径向基函数,即Gaussian RBF 核函数如式(1),径向基函数机器采用下面的决策规则集合

利用Lagrange 函数求解最小化问题,其约束条件不变。当引入核函数后,Lagrange 函数公式变为

约束条件不变,而决策函数变为

3.2.2 具体实现步骤
支持向量机优化算法的核心思想是采用分而治之(Divide-and-Conquer)的策略,先将整个优化问题分解为多个同样性质的子问题,通过循环解决子问题来求得初始问题的解。解决多类别分类的基本思想是,把多类问题划分为多个二类分类问题,通过某种方式组合这些子分类器来实现多类问题的分类。本文在理论和方法的基础上,构建基于支持向量机的多类分类模型,并通过试验,分析和研究这一方法在实际的应用中需要重点加以解决的核函数以及参数选择问题[12-13]。
SVM 算法分类的流程:
(1)输入两类训练样本,根据这些样本构造出训练样本矩阵和对应的类别样本矩阵。类别样本矩阵中的值为样本的分类类别,通常为1 和−1。
(3)根据公式计算b,这样便可以得到最终的分类决策函数。
(4)输入测试样本,利用分类决策函数得出分类结果。如果f(x)大于零,表示该样本属于类别一,否则属于类别二。
用框图表示,SVM 分类如图2 所示。
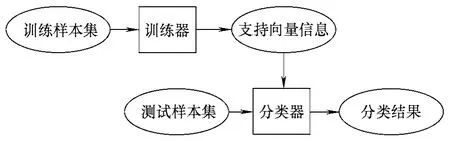
图2 SVM 分类示意图 Fig.2 SVM classification diagram
具体实现步骤如下:
图像中的边缘像素都是灰度变化较大的地方,边界候选像素提取算法就是找到这些点。为此,引入一个3×3 的检测窗口扫描图像,考察其中心像素与其邻域像素的灰度变化的最大值,通过设定适当的阈值将原始图像变换为二值边缘图像(1,−1)。假定点(x,y)与其邻域灰度变化的最大值为max,阈值为T,二值图像相应点处的值为g(x,y),则

此方法求取边界候选像素的优点是对每一像素都考虑了其邻域像素的灰度信息,更符合图像的边缘灰度变化的特点,因此对各类图像都具有广泛的适用性。经过上述提取过程得到的边界候选图像包含且完全包含全部图像的边界信息,但同时也包含其他非边界信息。因此,候选像素集合由边界像素集合与非边界像素集合组成。获得边界候选像素集合后,以边界候选像素及其邻域像素的二值输入模式作为样本集输入对边缘检测SVM 进行训练。同时,会把产生一些并不属于边缘点的噪声去掉。
图3 是边缘检测示意图,也可做消除噪声处理的结果。
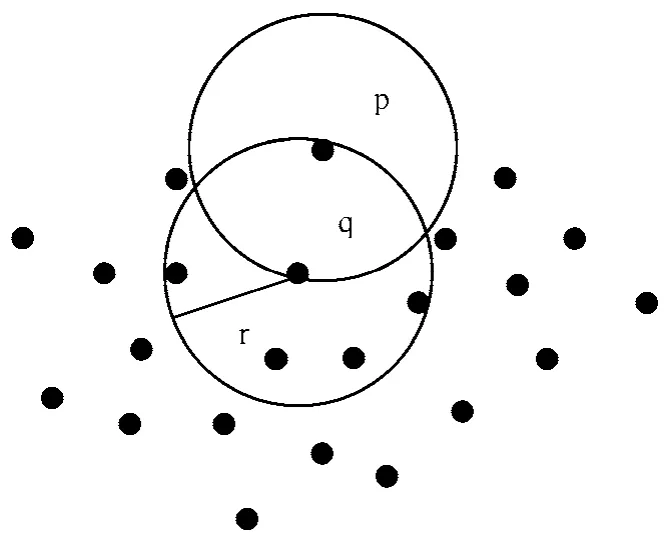
图3 边缘检测示意图 Fig.3 Edge detection diagram
4 实验结果比较和分析
本实验采用试品为CJX1—12/22 交流接触器,实验电气回路为AC 380V、感性负载,分断电流为5A,触头周围的介质为空气,光路系统采用卤钨灯作为光源。试品、CCD 及其中间的区域使用遮光罩包围,以免外部可见光对光路的影响。在第2 节介绍的硬件同步控制和图像采集及数据暂存机制下,分断电弧波长在465nm,采样间隔为0.37ms,拍摄电弧燃弧过程系列图像。经过对低压交流接触器进行多次实验,电弧从开始点燃、逐步增长、机械拉断、到逐渐熄灭的完整过程可以准确的记录下来,图4 第一列所示的图像a、b、c 分别为在2.22ms、3.7ms、4.81ms 截取的部分分断电弧的原始图像。
虽然从电弧图像中可以看出燃弧的形态,但经过直管纤维镜、析光镜等透镜的衰减以及CCD 的积分时间太短,所得的电弧图像不够清晰,因此需要采用数字图像处理来改善开关电弧图像。本文采用了支持向量机高斯核的电弧图像边缘检测方法(SVM),采集的电弧图像由于噪声的影响,有时可能把噪声当边缘点检测出来了,而真正的边缘又没被检测出来,引入径向基(RBF)核函数和拉格郎日(Lagrange)函数分类,可在边缘检测时,降低对噪声的敏感性,消除孤立的噪声点,所以很好地解决电弧图像噪声干扰问题,较好地保持图像细节。SVM 电弧图像边缘检测方法是对电弧运动图像进行边缘提取,电弧运动图像经过新构造的边缘检测模型的处理,使图像周围的像素值接近于真实值,增强被模糊的细节,起到了保护图像边缘信息,而且使电弧图像的边缘和细节变得更加突出。
图4 第二和第三列所示图像为电弧图像边缘检测结果,是采用三种传统的边缘检测方法(Sobel算子法、Prewitt 算子法、拉普拉斯算子法即Laplacian 算子法)与SVM 边缘检测方法对开关电弧运动图像处理的结果。
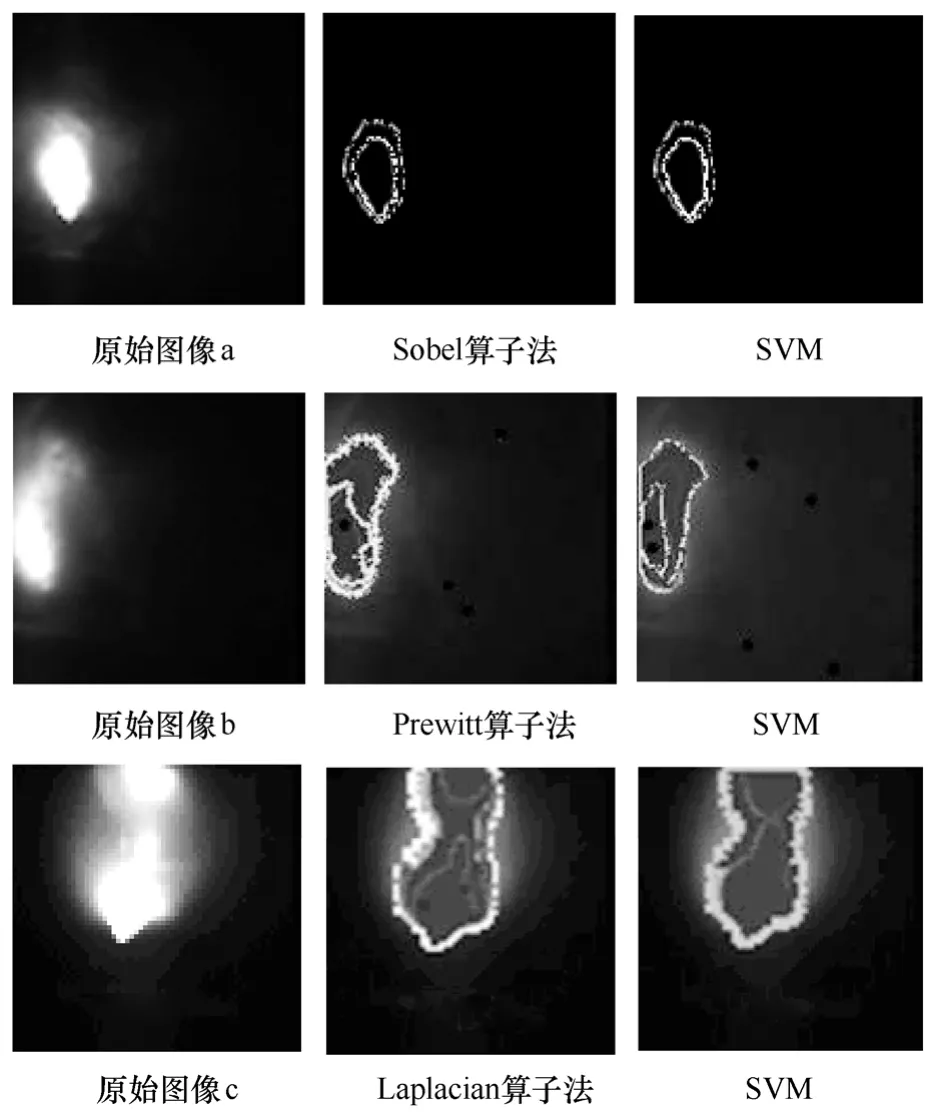
图4 电弧图像边缘检测结果 Fig.4 The edge detection results of arc image
4.1 实验结果分析
传统的边缘检测方法大多是在离散条件下,基于梯度差分的边缘检测。常见的梯度提取法,如Sobel 算子、Prewitt 算子、Laplacian 算子。
(1)Sobel 算子为一阶差分的算子,是一种将方向差分运算与局部平均相结合的算子,是在以f (i,j )为中心的3×3 邻域上计算x 和y 方向的偏导数,为了图像处理计算方便,采用离散卷积模板来进行边缘检测。
(2)传统的Prewitt 算子是微分运算为基础的边缘检测方法,边缘检测过程中是先进行领域平均,然后求差分。但在抗干扰和检出复杂形状的边缘之间仍存在较尖锐的矛盾,这反映在平滑窗口大小的选择上存在矛盾。
(3)Laplacian 算子是对二维函数进行运算的二阶导数算子,是根据图像在x、y 方向上的二阶偏导数定义的。因为图像边缘处会有较大的灰度变化,所以图像的一阶偏导数在边缘处有局部最大值或最小值,那么二阶导数在边缘处会通过零点(由正到负或由负到正)。用Laplacian 算子检测边缘就是估算Laplacian 算子的输出,找出它的零点位置。
从图中可以观察到,由于Sobel 算子并不是各向同性,所以从图4 看到的边缘并不是完全连通的,有一定程度的断开;发现一阶微分处理通常会产生较宽的边缘,如Prewitt 算子,一阶微分处理一般对灰度阶梯有较强的响应,所以抗干扰性能差;二阶微分对噪声比较敏感,这是不希望的,Laplacian 算子是二阶导数算子,则对噪声更加敏感。显然这些算法自身不具备保证边缘定位精度下的强噪声抑制能力,必须增加强噪声平滑手段。
4.2 实验结果比较和改进
这些传统边缘检测方法运算简单,但抗噪声性差,微分处理对细节有较强的响应,如细线和孤立点,有时会造成一些假轮廓或生成并不存在的边缘点。
与传统的边缘检测方法相比,支持向量机高斯核的电弧图像边缘检测方法(SVM 边缘检测方法)计算复杂,处理的时间高于传统的图像边缘检测方法,这是今后需要改进的部分;但是提取的电弧图像深度信息准确,在边缘检测时降低了对噪声的敏感性,使电弧运动图像中弧柱的边缘清晰可见。
实验显示,电弧运动图像边缘提取采用图像处理中非常有效的SVM 边缘检测方法,经过大量的实验对比对灰度渐变和噪声较多的图像处理得较理想。
5 结论
本文主要对边缘检测的方法进行了分析比较,构造基于支持向量机的图像边缘检测模型来实现电弧图像的边缘检测。这样不仅消除了电弧图像的噪声,而且可以在保留电弧弧柱强特征的同时,突出显示电弧图像的边缘特征,使电弧图像的边缘检测后的特征更适合于图像匹配,为电弧动态过程分析和电弧可视化模型提供比较准确和可靠的分析基础,取得较好的电弧图像增强效果。对深入研究电弧的运动机理提出了新的分析方法和手段。
[1] 吴翊,荣命哲,王小华,等.触头打开过程中低压空气电弧等离子体的动态分析[J].电工技术学报,2008,23(5):12-17.
Wu Yi,Rong Mingzhe,Wang Xiaohua,et al.Dynamic analysis of low-voltage air arc plasma during contact opening process[J].Transactions of China Electrotechnical Society,2008,23(5):12-17.
[2] Swierczynski B,Gonzalez J J,Teulet P,et al.Advances in low-voltage circuit breaker modeling[J].J.Phys.D:Appl.Phys.,2004,37(4):595-609.
[3] 季良,陈德桂,刘颖异,等.利用电弧动态数学模型的低压断路器开断过程仿真分析[J].中国电机工程学报,2009,29(21):107-113.
Ji Liang,Chen Degui,Liu Yingyi,et al.Simulation of the interruption process of low voltage circuit breaker using dynamic mathematic arc model[J].Proceedings of the CSEE,2009,29(21):107-113.
[4] 李兴文,陈德桂.低压空气开关电弧现代测试技术的研究综述[J].低压电器,2008,12(1):6-9.
Li Xingwen,Chen Degui.Review of the investing- ation on the modern measurement technologies of low voltage air switch arc[J].Low Voltage Apparatus,2008,12(1):6-9.
[5] 刘教民.低压电器电弧动态图像的采集与处理研 究[D].天津:河北工业大学,1998.
[6] Liu Jiaomin,Wang Jinghong.New method for capturing arc of moving on switching apparatus[J].Journal of Zhejiang University,2007,8(3):469-474.
[7] 章毓晋.图像处理和分析[M].北京:清华大学出版社,2006.
[8] 左飞.Visual C++数字图像处理[M].北京:电子工业出版社,2008.
[9] 张莉,周伟达.核聚类算法[J].计算机学报,2002,25(6):587-590.
Zhang Li,Zhou Weida.Kernel clustering algorithm[J].Chinese Journal of Computers,2002,25(6):587-590.
[10] Liu Jiaomin,Wang Jinghong.Parameters optimize method based on genetic and simulated annealing algorithm[J].Pattern Recognition and Artificial Intelligence,2008,22(1):169-181.
[11] 普运伟,金炜东.核模糊C 均值算法的聚类有效性的研究[J].计算机科学,2007,34(2):207-210.
Pu Yunwei,Jin Weidong.On cluster validity for kernelized fuzzy C-mean algorithm[J].Computer Science,2007,34(2):207-210.
[12] 战国科,夏哲雷.基于支持向量机的飞机图像识别算法[J].现代电子技术,2007,18(3):376-380.
Zhan Guoke,Xia Zhelei.Plane image fecognition based on support vector machine[J].Modern Electronics Technique,2007,18(3):376-380.
[13] 曹春红,张斌.基于模糊支持向量机的医学图像分类技术[J].吉林大学学报,2007,37(3):630-634.
Cao Chunhong,Zhang Bin.Medical picture classifi- cation techniques with SVM[J].Journal of Jilin University,2007,37(3):630-634.
猜你喜欢
数学物理学报(2022年5期)2022-10-09
北京航空航天大学学报(2022年6期)2022-07-02
智能建筑电气技术(2022年2期)2022-02-06
数学物理学报(2021年2期)2021-06-09
应用数学(2020年2期)2020-06-24
制造技术与机床(2019年9期)2019-09-10
数学年刊A辑(中文版)(2018年2期)2019-01-08
自动化学报(2017年5期)2017-05-14
电子制作(2017年22期)2017-02-02
光学精密工程(2016年1期)2016-11-07
