
ALOS卫星PRISM影像严格几何模型的构建与验证
2011-01-31 08:22范大昭刘楚斌唐新明
测绘学报 2011年5期
范大昭,刘楚斌,王 涛,雷 蓉,唐新明
1.北京大学遥感与地理信息系统研究所,北京100871;2.信息工程大学测绘学院,河南郑州450052;3.中国测绘科学研究院,北京100039
1 引 言
随着电子技术和遥感技术的发展,特别是高分辨率对地观测卫星和传感器平台上高精度导航、定位、姿态和时间测量系统等关键技术的重大突破,为高级测绘产品的生产提供了丰富的数据源,扩大了卫星测绘应用的范围,目前已能满足中小比例尺测图的精度要求。而卫星影像的无控制点或少控制点的目标定位是衡量高分辨率卫星影像测图能力的关键技术指标。近年来,利用高分辨率卫星遥感影像进行高精度目标定位、立体测图和变化监测已成为国内外的研究热点。同时,卫星遥感影像正越来越多地应用于摄影测量领域,空间分辨率达到米级的立体遥感图像,已有能力替代传统用于1∶50 000和1∶10 000比例尺地形图测绘或地理信息更新的航空影像[1]。
ALOS(advance land observing satellite)是全球目前唯一在轨运行的三线阵高分辨率立体测绘卫星,其任务使命是完成全球重点地区1∶25 000地形图测绘。对ALOS严格几何模型的研究不仅可以验证其真正达到的立体测绘能力,而且对国产三线阵测绘卫星的几何成像模型的建立与验证也具有重要参考价值。但目前国内还缺乏对ALOS几何建模方面的研究,国外的研究也是刚刚起步。文献[2]介绍了一种通用的推扫式传感器模型,但定位时需要进行自检校,且不能实现无控制点下的直接定位;文献[3]对全色遥感立体测绘仪 (panchromatic remote-sensing instrument for stereo mapping,PRISM)数据进行了立体评价,并构建了严格模型,但它需要较多的控制点来估计视线角,而且定位精度相对比较低,部分地区的定位精度近240 m。本文从 PRISM传感器成像原理出发,利用卫星影像的辅助数据文件构建了无需地面点的严格几何模型。试验发现,直接利用星上提供的轨道姿态数据和严格几何模型进行无控制定位精度较差,经分析发现ALOS卫星辅助数据文件中提供的CCD侧视角可能存在固定的系统误差,此值在一定的时间跨度内可视作固定值,将其当作常量对严格几何模型进行改进,能使校正后的严格几何模型定位精度得到显著提高:平面定位精度优于5 m,高程定位精度优于3 m,可真正实现无控制点下的高精度定位。
2 ALOS卫星及其数据介绍
ALOS是由日本航空航天研究中心JAXA (Japan Aerospace Exploration Agency)于 2006年发射的新一代陆地观测技术卫星。其上携带三种遥感传感器:PRISM、先进可见光和近红外辐射计AVNIR-2、相控阵型L波段合成孔径雷达PAL-SAR,其中PRISM是具有2.5 m空间分辨率的全色辐射计。为了获得包括高程在内的地面数据,PRISM具有三个相机分别用于沿卫星轨道方向的前视、下视和后视观测,以便快速获取高精度的地面信息。ALOS的PRISM影像为线阵推扫式影像。在焦平面内,下视相机有六组各自独立的CCD探测单元(每组有4 992个CCD元器件),前视、后视相机则均有八组独立的CCD探测单元(每组有4 928个CCD元器件)。对于标准幅面的下视影像以及前、后视影像来说,只有前4个CCD探测单元成像,有效像元的个数为4 864× 3。若是天底70 km幅面的影像,则前6个CCD探测单元成像,提取4 864×6个有效象元。每景影像文件有16 000行,面积约为30 km×70 km。
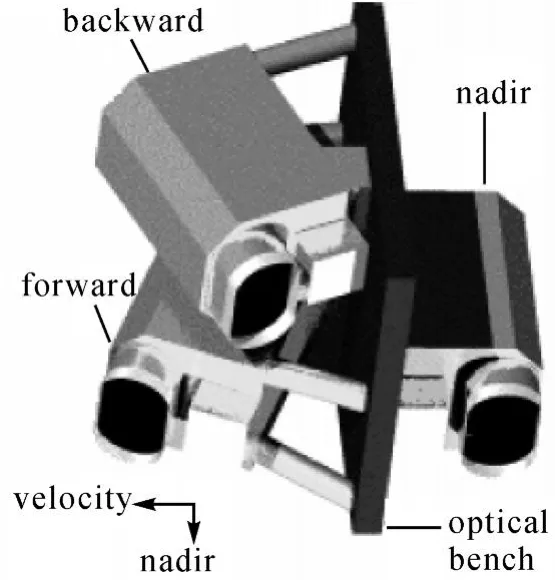
图1 PRISM结构图Fig.1 Overview of PRISM

图2 PRISM前、后、下视成像图Fig.2 Observation geometry of triplet mode
ALOS数据不仅提供了高分辨率的影像数据,而且提供了关于卫星运行轨道和姿态等各类参数信息的辅助数据文件。影像数据和辅助数据为CEOS格式,部分数据以ASCII和二进制形式给出。根据处理程度不同,PRISM数据可分为不同类型:不进行任何校正为Level 1A,经辐射校正后为 Level 1B1;经几何和辐射校正后为Level 1B2。
为了构建严格几何模型,笔者从卫星影像的辅助数据文件中提取出以下数据:精确轨道数据(precision orbit),精 确 姿 态 数 据 (precision attitude),坐标系转换矩阵 (coordinate conversion matrices)和几何参数(geometric parameter)等。与一般卫星不同的是,ALOS卫星姿态角数据以四元数的方式给出[3]。
3 严格几何模型的建立
3.1 扫描行的摄影时刻
任一扫描行l的像元所对应的摄影时刻t为

式中,tc为中心扫描行的摄影时刻;lc为中心扫描行号;t0为每行的扫描时间,这些量均可在辅助数据文件中获得。
3.2 摄影光线的确定
3.2.1 本体坐标系内的摄影光线
对于扫描行为l,列号为 p的CCD像元,该像元在卫星本体坐标系内的摄影光线由ψX和ψY两个角度确定,其中,ψX为沿轨道方向的侧视角, ψY为垂直于轨道方向的侧视角。列方向由6个 CCD拼接而成,相邻两个CCD之间重叠32个像素。辅助数据文件中给出了每个CCD首尾两个CCD像元的侧视角ψ(p1)、ψ(p2),利用内插便可求得列方向上任一像元的侧视角。若考虑到CCD变形,有
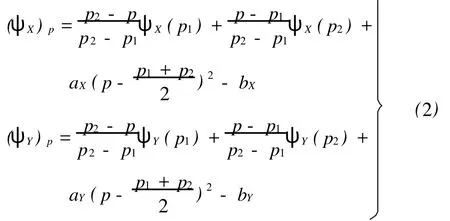
式中,p1、p2为某个CCD首尾像元的列号;p为该CCD上任一像元的列号;aX、bX、aY、bY为CCD变形参数。

式中,i={1,2};p1、p2、ψX(pi)、ψY(pi)、δ ψX0(i)、δ ψY0(i)均可从辅助数据文件中获得。
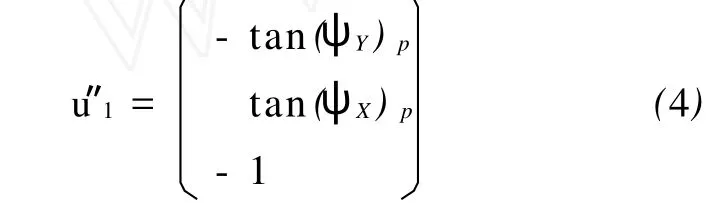
则任一像元的摄影光线u″1可由下式计算:
3.2.2 摄影光线的修正
与SPOT5不同的是,此处还需要对u′1进行修正,以消除多种系统误差,其中包括CCD变形误差、安置角误差、指向角误差等。方法如下:
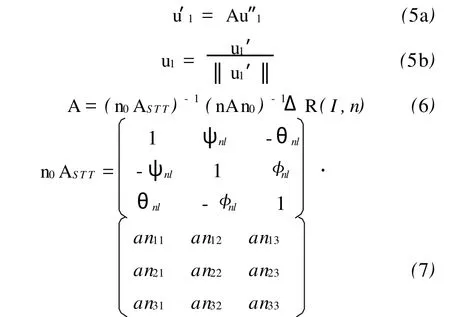
式中,an11—an33代表光学系统相对卫星本体的安置角。第一个矩阵代表安置角长周期变化量,其中φnl、θnl、ψnl可利用式(8)计算
式中,nlx、nly、nlz可在辅助数据文件中获得;d为起始时刻到成像时刻的天数。
式中,φn=nx0+nx1×s+…+nx30×s30,同样利用ny和nz可计算θn、ψn。nx、ny、nz等值均可在辅助数据文件中找到。
此矩阵用于消除指向角参数在传感器坐标系与CCD参考坐标系间的差异。本文中为单位矩阵。
由公式(5a)实现了对ALOS/PRISM卫星影像的内定向参数误差的校正。
3.2.3 ECI坐标系内的摄影光线
辅助数据文件每隔约0.1 s提供一组卫星姿态四元数。由于卫星姿态变化非常小,任意时刻t的四元数q0、q1、q2、q3可通过简单的线性内插确定。从本体坐标系到ECI坐标系的旋转矩阵M(q)为

则摄影光线u2可由下式计算而得

3.2.4 地球坐标系内的摄影光线
摄影光线u3可由下式计算

辅助数据文件中提供了每隔一分钟的极移矩阵 RXY以及岁差章动矩阵RPN。RGAST为周日自转矩阵,其实现的是从瞬时地球坐标系到真天球坐标系的转换,构建方式为


式中,θ0、Δ θ、t0也可从辅助数据文件中获得。
3.3 PRISM传感器的直接定位
确定了WGS-84坐标系中经过某一像点(l, p)的摄影光线,设该像点所对应的地面点距离参考椭球面的高度为 h,则由下式可得近似地面点坐标(X,Y,Z)。

式中,(Xs,Ys,Zs)为外方位线元素;m为尺度因子;A和B为参考椭球的长半轴和短半轴;a、b为WGS-84参考椭球的长半轴和短半轴。在本文中分别取a=6 378 137.0 m,b=6 356 752.3 m。
综上可得
解之得 m1、m2。取其中的较小值 m1代入公式(17)求得近似地面点坐标。
4 模型的验证及分析
为了对ALOS严格几何模型进行验证,利用国内某地区编号分别为003、004、005三景连续的同轨下视影像进行试验。其中,影像003中心为城区,四周为山区,控制点个数为7个;影像004北部较为平坦,南部为山区,控制点数为27个,图3为GPS控制点在影像004上的分布。005大部分为山区,中心地带为城区,控制点数为10个。控制点均为野外GPS实测点,精度为分米级。控制点的像点坐标为手工量测,精度为1个像素左右。
4.1 系统误差分析
首先利用004数据文件对ALOS PRISM影像进行直接定位试验。根据ALOS严格几何模型,利用控制点在影像004上的像点坐标和高程计算地面坐标,并将其与已知值进行比较。误差统计见表1,误差分布见图4。

图3 控制点在004影像上的分布Fig.3 Distribution of the ground control points (GCPs)in 004 imagery

表1 004影像直接定位精度Tab.1 Direct location accuracy of 004 imagery m

图4 004影像的检查点残差分布Fig.4 Distribution of residuals of 004 imagery check points
由表1和图4可知,直接定位计算得到的控制点坐标与其已知值在 X方向上的误差在-208 m处浮动,Y方向上误差在3 m处浮动,Z方向上误差在-222 m处浮动。显然,计算值与已知值在 X、Y、Z方向上分别存在固定的偏移量,且这个偏移量应属于固定的系统误差,可等效于摄影光线的偏差。分析模型构建的过程,系统误差的主要来源可能来自CCD侧视角系统误差,可将其当做常量进行处理。为了消除其影响,可将u3摄影光线绕Y轴旋转一个微小角度θy(类似侧视成像),此角度可利用1~2个地面控制点计算而得。对严格几何模型中的摄影光线u3修正如下

4.2 模型改进后的直接定位精度
利用改进后的ALOS严格几何模型进行直接定位。对误差进行统计,结果见表2;控制点上的误差分布见图5。
经过改进后,严格几何模型的定位精度提高十分显著,X方向定位精度优于3 m,Y方向的定位精度约为2 m,Z方向上的定位精度优于3 m。

图5 模型改进后004影像的检查点残差分布Fig.5 Distribution of residuals of 004 imagery check points using improved rigorous sensor model
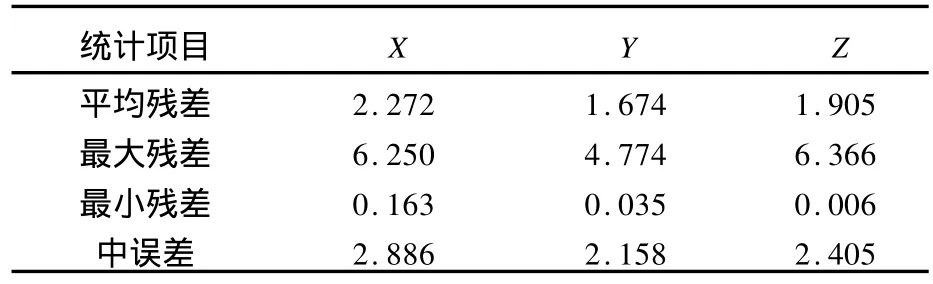
表2 模型改进后004影像的直接定位精度Tab.2 Direct location accuracy of 004 imagery using improved rigorous sensor model m
为了验证此模型的正确性,用004相邻两景编号分别为003和005的影像作进一步的验证。其中在影像003量测了7个控制点作为检查点,影像005量测了10个控制点作为检查点。侧视角误差θy直接利用影像004计算的结果。使用改进模型后003直接定位精度情况见表3,控制点上的误差分布见图6;005直接定位精度情况见表4,控制点上的误差分布见图7。
由图6和表3可知改进的严格几何模型在003地区的定位精度在 X方向上优于3 m,Y方向优于3 m,Z方向优于3 m。
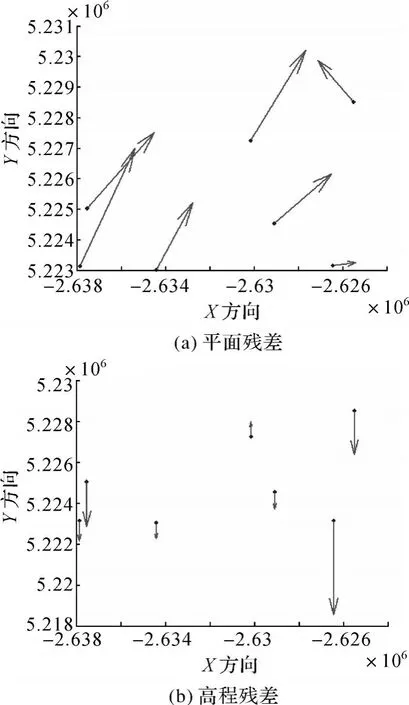
图6 模型改进后003影像的检查点残差分布Fig.6 Distribution of residuals of 003 imagery check points using improved rigorous sensor model

表3 模型改进后003影像的直接定位精度Tab.3 Direct location accuracy of 003 imagery using improved rigorous sensor model m
由表4和图7可知改进的严格几何模型在005地区的定位精度在 X方向上优于4 m,Y方向上优于5 m,Z方向上优于2 m。
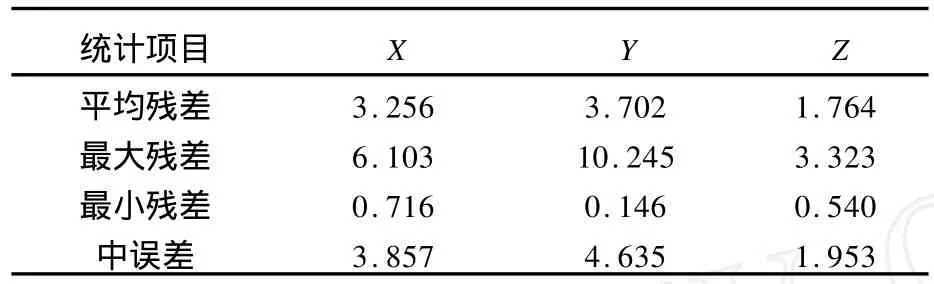
表4 模型改进后005影像的直接定位精度Tab.4 Direct location accuracy of 005 imagery using improved rigorous sensor model m

图7 模型改进后005影像的检查点残差分布Fig.7 Distribution of residuals of 005 imagery check points using improved rigorous sensor model
此模型在三景影像文件,即约105 km×5 km测区内验证定位精度在 X方向上优于4 m,Y方向上优于5 m,Z方向上优于3 m。试验结果表明利用本模型进行ALOS PRISM影像的无控制定位精度较高,并且稳定性好。
5 结 语
本文根据ALOS卫星PRISM传感器的成像原理,利用卫星影像的辅助数据文件构建了ALOS PRISM的严格几何模型,用少量(1~2个)控制点估计CCD侧视角的系统误差,并将其当做常差加以处理,在此基础上对ALOS PRISM严格几何模型进行改进。利用国内某地区编号分别为003、004、005三景连续的ALOS PRISM同轨下视影像进行试验,得到了较为满意的试验结果:003、004影像直接定位的平面精度优于3 m,高程精度优于3 m;005影像直接定位的平面精度优于5 m,高程精度优于2 m。经改进后的严格几何模型具有较强的稳定性,在无控制点条件下具有较高的定位精度。
本文通过试验验证了ALOS严格几何模型的正确性,揭示了基于卫星星历和传感器姿态进行航天遥感直接对地目标定位的可行性及精度潜力。同时本模型的构建成功,对国产三线阵测绘卫星的严格几何模型的建立与验证也具有重要参考价值。
当前试验中不同地区影像的直接定位精度有着细微的差别,其中的原因笔者分析可能是CCD侧视角的细微变化。由于目前ALOS仍在轨运行,模型的进一步优化和分析仍在深入研究之中。
[1] ZHANG Li,YUAN Feng.Geometric Modeling of Optical Spaceborne Sensors and DEM Generation[J].Geomatics World,2009(2):53-71.(张力,袁枫.光学航天传感器几何建模与DEM生成新进展[J].地理信息世界,2009(2): 53-71.)
[2] WESER T,ROTTENSTEINER F,WILLNEFF J,et al. An Improved Pushbroom Scanner Model for Precise Georeferencing of ALOS PRISM Imagery[C]∥The International Archives of the Photogrammetry,Remote Sensing and SpatialInformation Sciences,Vol.XXXVII,PartB1. Beijing:[s.n.],2008:739-744.
[3] SCHNEIDER M,LEHNER M,MÜLLER R,et al.Stereo Evaluation of ALOS/PRISM Data on ESA-AO Test Sites—First DLR Results[C]∥The International Archives of the Photogrammetry,Remote Sensing and Spatial Information Sciences,Vol.XXXVII,Part B1.Beijing:[s.n.],2008: 723-729.
[4] JAXA.ALOS PRISM Level 1 Product Format Descriptions Rev,October 2006.[EB/OL].[2009-10-12].http:∥www.eorc.jaxa.jp/ALOS/doc/format.htm.
[5] KAMIYA I.Geometric Characteristics of the Early Products of ALOS PRISM[J].Bulletin of the Geographical Survey Institute,2007,54:75-82.
[6] KOCAMAN S,GRUEN A.Rigorous Sensor Modeling of ALOS/PRISM Imagery[C]∥ Proceedings of the 8th Conferenceon Optical3D Measurement Techniques. Zurich:[s.n.],2007:204-213.
[7] KORNUS W,LEHNER M,SCHROEDER M.Geometric Inflight Calibration by Block Adjustment Using MOMS-2P 3-line-imagery of Three Intersecting Stereo-strips[C]∥Proceedings of Joint Workshop on Sensors and Mapping from Space 1999.Hannover:[s.n.],1999:42-54.
[8] YUAN Xiuxiao,CAO Jinshan,YAO Na.A Rigorous Geometric Model Considering the Variety of Side Watch Angle forHigh Resolution Satellite Imagery[J].Acta Geodaetica et Cartographica Sinica,2009,38(2):120-124. (袁修孝,曹金山,姚娜.顾及CCD侧视角变化的高分辨率卫星遥感影像严格几何模型[J].测绘学报,2009,38(2): 120-124.)
猜你喜欢
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
测控技术(2018年4期)2018-11-25
网络安全和信息化(2018年9期)2018-03-03
信息安全研究(2018年1期)2018-02-07
北京航空航天大学学报(2017年4期)2017-11-23
网络安全和信息化(2017年12期)2017-11-08
雷达学报(2017年1期)2017-05-17
中国工程咨询(2017年12期)2017-01-31
安徽地质(2016年4期)2016-02-27
