太阳方位的自动获取及实时跟踪系统的设计*
2011-01-25 01:26:00王斌,张珣
天文研究与技术 2011年1期
王 斌,张 珣
(杭州电子科技大学电子信息学院,浙江 杭州 310018)
在众多环境问题中矿物燃料形成的污染十分严重,而利用太阳能作能源,没有废渣、废气、废水排出,无噪声,不产生有害物质,这在环境污染日趋严重的今天显得尤为可贵[1]。21世纪人类最清洁、最廉价的能源就是太阳能[2-3]。它作为一种清洁无污染的能源,发展前景非常广阔。太阳能发电已成为全球发展速度最快的技术。然而由于太阳随季节气候和天气昼夜变化而变化,如果不能做到实时跟踪,那么太阳能将会变得非常不易收集[4]。传统的太阳追踪控制系统需要计算机辅助,成本较高,且需要地球经纬度地区的数据和设定,一旦安装,就不便移动或装拆,每次移动完就必须重新设定数据和调整各个参数;原理、电路、技术、设备复杂,非专业人士不能够随便操作。本文基于一种高精度太阳方位的算法,设计了一套实时跟踪系统,能让装置在任意方向摆放时自动追踪太阳方位,整套系统成本较低,性能稳定,能够被广泛的应用于光伏发电系统。
1 太阳方位的数学模型简介
定位太阳,即得到定位点精确的太阳高度角与太阳方位角,而这两个角度可以通过解天文球面三角得到,其计算公式如下[5]:

其中h为高度角;A为方位角。只要能得到精确的太阳赤纬角、纬度以及太阳时角τ,那么太阳就能被精确定位,而经纬度与格林时间可以通过GPS得到,这里主要介绍δ和τ的计算。这两个角度计算的方法有多种,通过实验发现,相比较而言,以下两种方法能得到较高的精度并且具有较简单的操作,一种是传统的公式计算法,另一种则是通过查太阳赤纬表、时差表并加以补偿计算法,为方便以下简称为公式法和查表法。
1.1 公式法
(1)太阳赤纬角
地球绕太阳公转的轨道平面称黄道面,而地球的自转轴称极轴。极轴与黄道面不是垂直相交,而是呈66.5°角,并且这个角度在公转中始终维持不变。正是由于这一原因形成了每日中午时刻太阳高度的不同,以及随之而来的四季变迁。太阳赤纬角在春分和秋分时刻等于0,而在夏至和冬至时刻有极值,分别为±23.442°。
由于太阳赤纬角在周年运动中任何时刻的具体值都是严格已知的,所以它 (δ)也可以用以下表达式表述,即:

式中N为积日,所谓积日,就是日期在年内的顺序号,例如,1月1日其积日为1,平年12月31日的积日为365,闰年则为366,等等。

(2)太阳时角
真正的太阳在黄道上的运动不是匀速的,而是时快时慢,因此,真太阳日的长短也就各不相同。但人们的实际生活需要一种均匀不变的时间单位,这就需要寻找一个假想的太阳,它以均匀的速度在运行。这个假想的太阳就称为平太阳,其周日的持续时间称平太阳日,由此而来的小时称为平太阳时[6]。

1.2 查表法
这里的“表”是指以4年为一个周期的太阳赤纬表和太阳时差表,共8张,将其输入单片机或其他数据库,固化于CPU中,可以随时提取。
(1)太阳赤纬角
δ是时间函数,每秒计能够满足时间精度要求,4年一周。

其中,TG表示太阳格林时,由GPS得到;δG12h是正午12点的太阳赤纬角,由数据库提取;赤纬和测量者赤纬的符号,应该北正,南负。
(2)太阳时角

其中,ΔTG12h表示格林时差,由数据库提取;τ太阳时角,是平阳时、时差、时差修正量和测量者经度的函数,方位以顺时针方向360计,时角以西行作为起点较为方便,东经也换算成西经进行计算。
换算式:λZW=360-λZE,其中λZW为西行测量者经度;λZE为东行测量者经度,由GPS得到;同样,也可以使用天文学公式计算出太阳高度角和方位角。
通过以上的比较,可以发现采用公式法由于存在大量正余弦的运算,不便于在单片机里进行,这会大大的延长其运算时间,并且每次运算都要对年份、经度、时刻等值进行修正,较为繁琐,很难做到实时追踪,而查表法只需将数据表存入EEPROM,在使用时直接读取即可,做较为简单的计算,操作简便,但由于表格以小时为单位,分和秒进行折中计算,会产生一定的误差,但实际试验中仍能满足追踪需求,因此在本系统中采用查表法。
2 系统结构模型
整个系统的结构如图1,其中箭头表示数据流方向。

图1 系统框架图Fig.1 Block diagram of the system
(1)处理器dsPIC30F6014A
单片机作为核心处理器采用了微星公司的dsPIC30F6014A,具有低功耗、高速度、体积小、功能强、抗干扰能力强等优点,其内置DSP引擎,显著提高了内核运算能力和吞吐量,可实现最佳性能[7],内置4K EEPROM可以将数据表格直接存在其中,另外丰富的外围接口为将来扩展其他功能提供了方便;但是由于单片机的UART模块有限,而外部需处理的数据较多,故采用串口扩展芯片进行分流。
(2)GPS模块
GARMIN的GPS产品为同时能跟踪多达12颗卫星的GPS接收机,功耗非常小,数据更新率为每秒一次,采用0183协议与单片机进行通信,单片机获取当地的年月日、时分秒、经纬度信息,以用于上述的太阳方位计算。
(3)HMR3200
HMR3200是霍尼韦尔公司生产的高精度电子罗盘,具有两轴的磁阻传感器,能够输出分辨率为0.1°的航向角,即以磁北为0°的顺时针角度,用于识别整个装置的初始位置。
(4)数字方位仪
高精度数字方位仪由两个步进电机控制摄像头组成,能够在水平面和垂直面精确定位,电机采用了两相混合式步进电机,步距角为0.9°,分辨率不能达到追踪需求,故采用细分芯片MTD2009J对每一步进行了4096的细分,分辨率控制在0.001°以内,考虑到步进电机存在丢步、共振导致的误差,每次转回原点都对其进行修正,确保精度在0.01°以内,用以达到追踪的需求,整个装置与上述电子罗盘一起固定在一个水平环内,外界的适度倾斜能使装置保持水平,同时以这个初值作为垂直面的高度角基准,以电子罗盘的初值作为水平面的方位角基准,并以485信号返回高度角和方位角与单片机通讯,同时方位仪有一套自身协议,单片机可通过指令控制其上下左右的旋转;方位仪上摄像头输出的视频信号经过视频图像编码芯片送入TFT屏显示。
3 系统软件工作流程
图2为系统的工作流程,其中系统初始化包括系统的安装,必须确保罗盘与方位仪的水平位置相对固定,否则将会产生系统偏差。另外,HMR3200需要进行一个自校准,由于电子罗盘依靠地球磁场来得到输出指向,而其磁阻传感器容易受到软硬铁的干扰,使测得磁场为地磁和周围磁场的合磁场,因此必须将整个载体平台旋转一圈,以扣除周围磁场在两个磁阻轴上引起的偏置,确保输出的精度[8]。然后读取HMR3200输出数据,记为θ1,读取GPS数据,并调用EEPROM计算太阳高度角h,方位角θ2,则方位仪的真实垂直旋转角度为h,水平角度为θ=θ1-θ2,若θ<0,则θ=θ+360;同时单片机实时读取方位仪的返回值判断是否到达目标位置,完成后则继续读取GPS数据,重复上述操作。若校准后周围又重新放置了大型铁块,使磁场发生改变则需重新校准HMR3200,若主控制台发生移动,则需重读传感器数据。
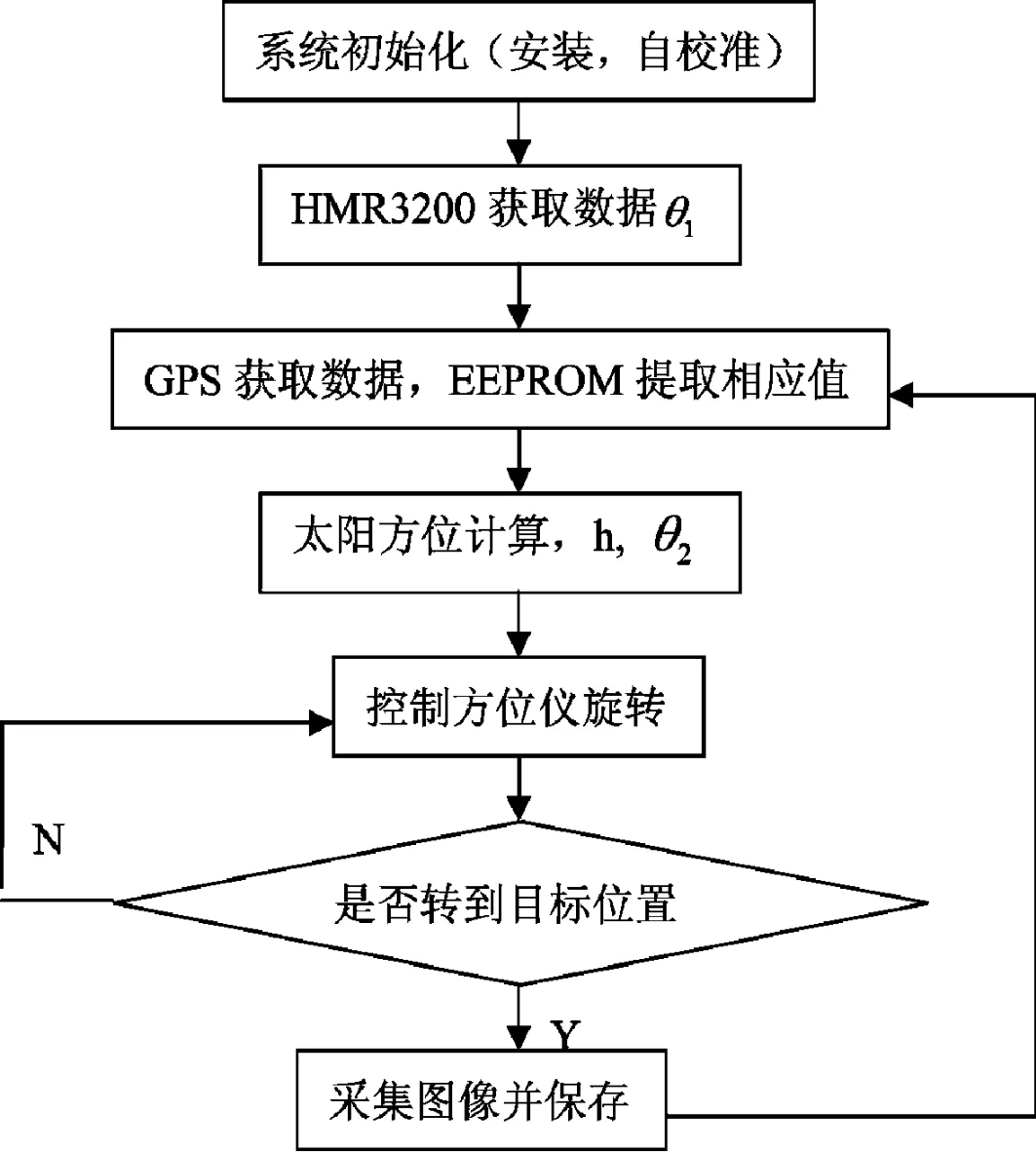
图2 软件流程图Fig.2 Flowchart of the software for the system
4 结果分析
在测试环境中对上述两种高度角和方位角的算法进行了试验,验证了其可行性,其计算精度都能用于太阳追踪。在实际系统中采用了查表法,下表为某地每分钟连续测试结果,限于篇幅仅列出5组数据如下 (测试地点:东经120.3374°,北纬30.3143°;测试日期:2010-1-11):

表1 太阳方位计算值Table 1 Some calculated values of azimuths of the sun
根据上述结果及长时间的计算显示,计算误差在0.04°左右,将其作为系统误差扣除,使其精度能保证在0.01°,因此能够满足实时的跟踪,通过数字方位仪摄像头对太阳进行捕捉,结果如图3。

图3 捕捉视频显示Fig.3 Display of the captured video
由于太阳光的强度很大,摄像头直接对准太阳会导致其损坏,因此在摄像头上安装了中性衰减片,不同波长的光按同一比例衰减[9],既保护了摄像头,也使得图像便于观察处理。
5 结论
本系统基本实现了太阳方位的定位和实时追踪功能,能够在光伏发电系统中使用,但仍有可以改进的地方,由于各个模块相对独立,安装、设置等步骤相对比较麻烦,可以将GPS、电子罗盘置于一块电路板中,用DSP作为处理器,直接对图像进行获取,缩小体积,便于使用。另外,对于太阳方位计算可以进一步细分太阳赤纬表和太阳时差表,用更大容量的EEPROM来存储,使得追踪精度进一步提高。
[1]M M Ardehali,M Shahrestani,Charles C Adams.Energy Simulation of Solar Assisted Absorption System and Examination of Clearness Index Effects on Auxiliary Heating [J].Energy Conversion and Management,2007,48(3):864 -870.
[2]余海.太阳能利用综述及提高其利用率的途径 [J].能源研究与利用,2004,3:34-37.Yu Hai.Summarization of Solar Energy Utilization and Approaches to its Utilization Efficiency increase [J].Energy Research and Utilization,2004,3:34-37.
[3]徐机玲,蔡玉高.太阳能利用新突破 [J].瞭望,2004,39:59.Xu Jiling,Cai Yugao.Break through in Solar Energy Utilization [J].Outlook Weekly,2004,39:59.
[4]赵丽伟.太阳自动追踪系统的研究 [D].吉林:吉林大学,2007.
[5]赵仁余.航海学 [M].北京:人民交通出版社,2006.
[6]王炳忠.太阳辐射计算讲座 [J].太阳能,1999,(2):8-10.Wang Bingzhong.Lecture on Calculation of Solar Irradiance [J].Solar Energy,1999,(2):8-10.
[7]刘和平.dsPIC通用数字信号控制器远离及应用 [M].北京:北京航天航空大学出版社,2007.
[8]Michael J Caruso.Applications of Magnetoresistive Sensors in Navigation Systems [EB/OL].Honeywell Inc,2009 -11-28,http://www.honeywell.com.
[9]吴春晖,朱庆生,周小军.全日面太阳光学和磁场望远镜的自动跟踪与导行方法 [J].天文研究与术——国家天文台台刊,2007,4(2):147-152.Wu Chunhui,Zhu Qingsheng,Zhou Xiaojun.The Tracking and Guiding Method for Full Solar Disk Vector Magnetograph Telescope [J]. Astronomical Research & Technology——Publications of National Astronomical Observatories of China,2007,4(2):147-152.
猜你喜欢
中国交通信息化(2022年9期)2022-10-28 06:14:40
汽车工程师(2021年12期)2022-01-18 06:02:43
幼儿园(2021年12期)2021-11-06 05:10:20
卷宗(2021年2期)2021-03-09 07:57:24
空间科学学报(2020年4期)2020-04-22 01:17:04
中国修辞(2016年0期)2016-03-20 05:54:32
幼儿100(2016年28期)2016-02-28 21:26:17
火控雷达技术(2016年2期)2016-02-06 02:29:00
河南科技(2015年18期)2015-11-25 08:50:14
汽车维修与保养(2015年8期)2015-04-17 03:32:59