
精密自动太阳跟踪器的设计
2011-01-15 00:37张定学
武汉轻工大学学报 2011年3期
张定学
(武汉工业学院电气信息工程系,湖北武汉430023)
精密自动太阳跟踪器的设计
张定学
(武汉工业学院电气信息工程系,湖北武汉430023)
要想高效率地吸收太阳能,集热器必须全天候地对准太阳。本文介绍了基于地平坐标系的二轴自动太阳跟踪器的原理,设计方法,控制算法流程和消除误差的措施。给出了一种简便实用的太阳跟踪器的实现方法。实践表明,这种太阳跟踪器具有高效,便利,实用的特点。
地平坐标系;二轴跟踪;控制算法;误差消除
太阳能是地球上最丰富的可再生利用的绿色环保能源,在利用集热器收集它的热能或通过太阳能电池板将其转换成为电能的工程中,都希望发挥最大效率。因此必须设法使跟踪台架始终正对太阳并且实时地随太阳作同步运转。本文详细地叙述了一种在工程实践中使用的自动跟踪台架的设计方案及其具体实现方法。
工程实践上同步跟踪太阳的方法主要有两种:利用光电传感器来校正误差的光电式跟踪(类似于雷达跟踪目标的原理)以及依据地球绕太阳公转的轨道公式进行计算的位置式跟踪(基于地平坐标系太阳跟踪原理)。光电跟踪装置一般都使用成对的光敏传感器(如硅光电管)来感知跟踪台架与太阳光的垂直偏差,以便决定跟踪台架下一步的运转情况。这种光电式有很多缺点,比如:容易受到天气的影响(在阴雨天时,检测竖直角和水平角的光电传感器没有信号输出,台架不知道如何运转);在进行实时跟踪时容易产生位置振荡(如小范围内上下,左右摇摆)等,尤其是当跟踪台架上承载一,两吨的重物时,上下摇摆更加有害,甚至会危害到人身安全;由于灰尘的遮蔽及四季温差的变化,容易破坏光敏传感器结构参数的对称性。
而根据视日运动的轨迹进行的位置式跟踪方法不受天气,季节,气候的影响,可以实现真正的前天候跟踪。这种太阳跟踪器就有原理简单,结构合理,跟踪精度高,经济适用的优良特点。所以本系统选用了视日运动的位置式跟踪方法。
1 跟踪原理
这套太阳跟踪器是基于地平坐标系数学模型实现的,地平坐标系是以真地平为基本园圈,以正南方为起始点。所有经过天顶的大圆都垂直于真地平平面。在地平坐标系模型中,太阳(看作是一个质点)的位置可以通过两个参数来确定,即高度角和方位角。高度角是太阳照射到地球上的射线与当地水平面的夹角。方位角是太阳射线在水平面上的投影(也就是影子)与正南方向构成的角度。如图1所示:①跟踪台架由水平回转台和上下(即垂直方向)方向移动的支撑机构两部份构成,水平方向上对太阳的跟踪由工控机控制横轴(即X轴)上的高精度步进电机转动实时计算出来的角度来实现,垂直方向上台架的上下移动则由另一台步进电机来带动。由于使用了俯仰角和方位角的二轴控制,这样就可以使跟踪台架在三维立体空间内自由移动,以便对太阳进行全天候的实时跟踪。②如果能够知道任何时刻,跟踪台架和水平面(赤道平面)的倾斜角度β,以及在水平面内台架相对于某一方向(例如南北方向)转动的角度α,则可以利用两根转轴(垂直方向的Z轴和水平方向的X轴)使台架平面始终和太阳光线保持垂直。

图1 跟踪台架传动结构照片
天文学上已经推算出了基于地平坐标系的地球公转轨道的精确数学模型,解决了计算俯仰角(倾斜角)β和方位角α的问题。依据基于地平坐标系的数学模型,转台采光面上的日射入射角θ可以由太阳赤纬角δ,时角φ,转台应升降的倾斜角度β,水平方向应回转的方位角α和试验场所的纬度φ,经度l经过计算得到。为了形象地确定太阳相对于操作人员的相对位置,在此引入天球的概念模型:设想一个以操作人员所在地为球心,半径无穷大的一个园球体,把太阳看做是这个球体(天球)中的一个忽视其大小的质点,而且还假设天球的赤道面与地球的赤道刚好重合,试验地所在的水平面与天球的水平面重叠,通过过球心的垂直于天球水平面的一条直径的上端点称为天顶;在球面三角形中运用余弦定律可以推算出太阳的高度角β与纬度φ及时角ω间的关系公式:

经过整理可得:

其中:δ是太阳在天球上的纬度,即赤纬角:

n是由1月1日起算的总天数,天球赤道以北δ为正,反之为负;φ是试验场所的地理纬度(北半球φ取正值,南北球取负值)。
太阳的时角ω的计算公式为:

其中[H+(L-Lss)+e/60]部分为当地午时;Hs为当地标准时(h);L为当地经度(°)。
而e为当地的时差,它可以通过以下算式计算得到:

上式中:B=360(n-81)/364.
根据球面三角形的正弦定理:

经整理得到太阳方位角α的计算公式为:

由上述推导过程可以看出:只要知道当地的经度L,纬度Φ就可以计算出任何时候太阳的高度角β和方位角α,从而控制转台的实时跟踪。
2 跟踪台架的实现方案
跟踪转台竖直方向的运动过程如图2所示:在进行跟踪之前工控机自动把台架调回到位于水平面的位置(称之为回零),控制程序会根据日期和时间自动计算出台架在当地当时的倾斜角度β(其中要用到的β0为已经测算出来的初始固定角度)。在图2所示的三角形ABP中,按照余弦定理可计算出丝杆的长度BP=Δh+h0;其中h0为台架水平放置时的丝杆长度BO.
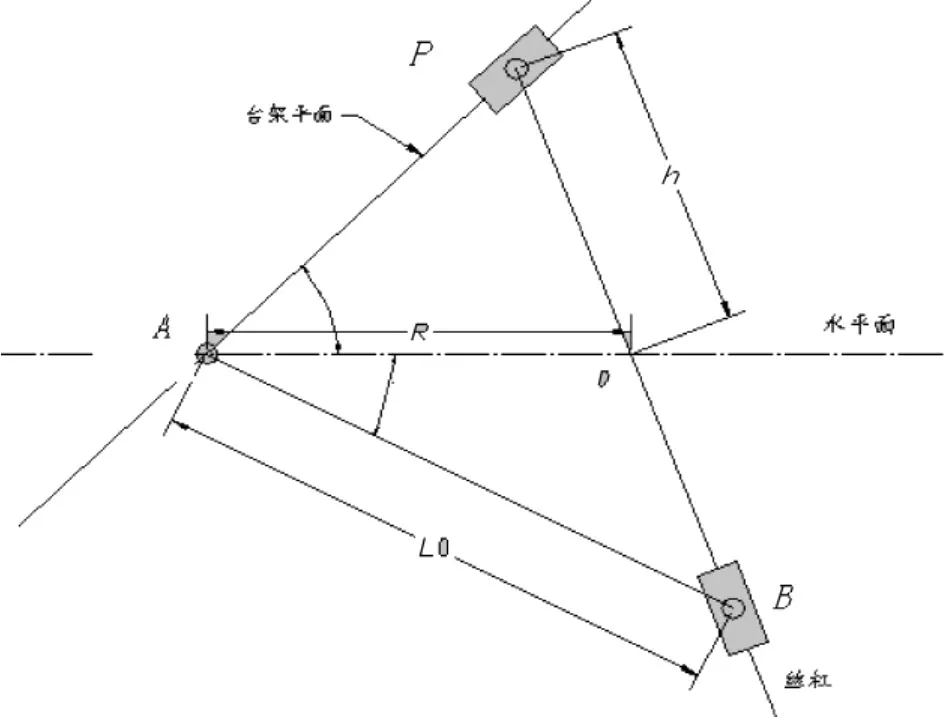
图2 跟踪台架垂直方向的运动轨迹示意图
那么当台架的倾角为β时丝杆的伸长量为Δh(既是超出水平面的部分),把它除以丝杠的螺距T就可以计算出丝杠在这一轮跟踪中应该的转动圈数y,然后根据竖直方向传动机构的减速比n就可算得驱动z轴的步进电机的这一次的转动圈数ny以及脉冲分配器应发的脉冲数。
依照同样的方法,给定某一时刻太阳的方位角α及水平传动机构的减速比m就可以算出带动X轴的步进电机应走的步数。从而实现在竖直和水平两个方向对太阳的进行全天候的实时跟踪。
由于转台所在的竖直和水平方向的实际位置很难精确测量出来(需要大尺度的精密位置测量传感器),如果采用闭环控制的方法跟踪太阳,则难以得到实际位置参数(既是反馈量)。所以本跟踪系统采用开环控制的方法;这样就可以省掉测量X,Z轴实际位置的高精度传感器,从而可以降低造价,简化控制方法,增强跟踪系统的可靠性。此外,在实际进行跟踪的时候还采用脉冲累计的办法来消除传动机构的间隙带来的一些机械加工误差(比如轴承的间隙,齿轮正反转的回程差等)。
电气控制系统硬件部分由分别控制水平,竖直方向的两台步进电机,一些手动操作按钮,若干进行位置限定的行程开关和一台工控计算机组成(工控机还要承担其他的实时测量,控制任务)。图3所示是跟踪控制程序的主要流程。
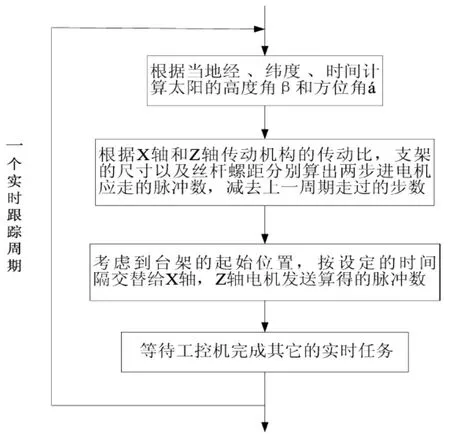
图3 跟踪控制算法的主要流程
3 跟踪台架的运行及起始位置的确定
依据上文建立的天球坐标模型:太阳方位角的起点参考点是正南方,高度角(也就是倾斜角度)的起始点是地球的水平面;然而,要想在工程实践中测定当地的地理位置上的正南方向很困难,况且还容易带来测量误差;再者,把比较笨重的转台平面精确地调整到和水平面刚好重合也不容易。所以,在实际操作中往往在正南方附近选取某一位置作为方位角的参考起点(在这里装设一个行程开关来定位)。同时,在当地水平面附近选取一个近似和它平行的平面作为倾角的参考平面,如图4、图5所示。然后想办法利用软件自动算出X轴方向参考点和正南方向的夹角α0以及倾角参考平面和水平面的夹角β0;那么在实时追踪太阳的时候中考虑进去初始位置(称为零点)α0和β0的影响即可。
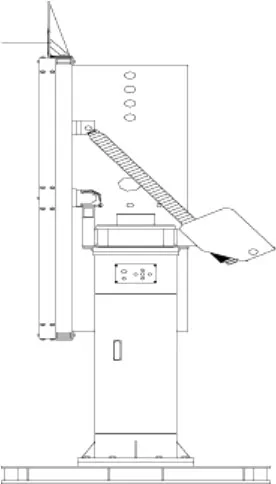
图4 转台朝向南方
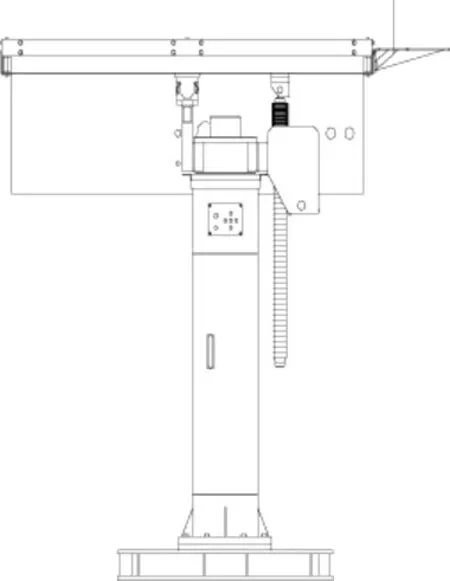
图5 转台水平放置
确定初始位置角度α0和β0的方法:于跟踪台架的正面平面上安装一日晷,通过观察指针的在刻度圆盘面上投影的长确定转台是否对准了太阳。然后选取一天中的某一个合适的时刻(例如早上9时左右)用手动的方法操作控制面板,调整跟踪台架到正对太阳为止。在这期间,工控机会利用程序自动累计从初始位置到台架正对太阳时驱动X轴和Z轴的步进电机分别走过的脉冲数,而在此期间台架由正南方和真实水平面开始应该走过的脉冲数可由上面的轨迹计算公式算出,最后通过把两者分别进行相减即可得到α0和β0的取值。一旦始位置确定下来,就可以依据轨迹模型算法进行全天候的实时跟踪了。如图4、图5所示的具体跟踪过程为:首先让Z轴与X轴自动回到初始位置,然后从初始位置开始不间断地驱动X轴和Z轴电机转动,直到对准太阳,再每隔一定的时间间隔(系统已经设定好的),依照前述公式计算出α角和β角的增量来自动调整跟踪台架的方位角和倾斜角使其始终正对太阳。
4 结束语
对于地平坐标系全跟踪方式,其跟踪精度不但跟φ、δ、ω的取值有关,还与步进电机精度及跟踪台的机械结构有关,因此需要对跟踪轨迹进行校正,使跟踪台在实际运行过程中精确对准太阳。随着太阳能的进一步开发利用,太阳跟踪的应用将越来越广泛。
[1] 李业发,杨廷柱.能源工程导论[M].安徽:中国科学技术大学出版社.1999:152-155.
[2] 魏保太.能源工程[M].湖北:华中理工大学出版社,1985:146 -149
[3] 张定学.闭式太阳集热器综合性能测试系统的研究与开发[D].武汉:华中科技大学图书馆,2005.
[4] GB/T 4271-2000,太阳集热器热性能试验方法[S].北京:中国国家标准化管理委员会.
[5] 世界能源理事会中国国家委员会.面向21世纪的世界能源[M].北京:原子能出版社.2001.
The design of automatic solar tracker
ZHANG Ding-xue
(Department of Electrical and Information Engineering,Wuhan Polytechnic University,Wuhan 430023,China)
To absorb solar energy efficiently,collector must be toward the sun throughout the day.This article describes the principle,design method,control algorithm and measures to eliminate errors of the automatic sun-tracking device based on horizon coordinate system with two-axis.A simple and practical method for realizing solar tracking has been provided.The practices shows that the solar tracker is an efficient,convenient and practical.
horizon coordinate system;two-axis tracking;control algorithm;error elimination
TP 275
A
1009-4881(2011)03-0034-03
10.3969/j.issn.1009-4881.2011.03.009
2011-04-04.
张定学(1968-),男,讲师,E-mail:zhangdingxue888@126.com.
湖北省横向联合科技攻关项目(2002AA101C61);UNDP(联合国开发计划署)GEF(加速中国可再生能源商业化基金)项目.
猜你喜欢
太阳能(2022年3期)2022-03-29
太阳能(2020年3期)2020-04-08
环球时报(2019-11-14)2019-11-14
收藏界(2019年3期)2019-10-10
当代工人·精品C(2019年2期)2019-05-10
收藏界(2018年4期)2018-10-12
计算机应用与软件(2017年7期)2017-08-12
中国惯性技术学报(2017年1期)2017-06-09
中学数学杂志(高中版)(2016年6期)2017-03-01
新高考·高一物理(2014年1期)2014-09-18
