在漂泊状态下使用WH ADCP测流
2011-01-10 01:41梁广建王江伟
海洋技术学报 2011年4期
梁广建 ,王江伟 ,徐 刚
(1.南海舰队海洋水文气象中心,广东 湛江 524001;2.总参气象水文局,北京 100073;3.92488部队,广东 湛江524064)
在漂泊状态下使用WH ADCP测流
梁广建1,王江伟2,徐 刚3
(1.南海舰队海洋水文气象中心,广东 湛江 524001;2.总参气象水文局,北京 100073;3.92488部队,广东 湛江524064)
WH ADCP主要用在沉底式潜标观测和锚系式潜标观测,在以调查船为平台的海洋调查中则常用UCM、SLC等海流仪。由于WH ADCP具有体积小,可同时观测多层的优点,可考虑将其用在以调查船为平台的海洋调查中。介绍WH ADCP以调查船为平台的海洋调查中的使用方法,并与OSADCP的测量结果进行分析对比,证明WH ADCP用在连续站观测中效果理想。
WH ADCP;OS ADCP;海洋调查;海流
WH ADCP全称Work Horse Broadband Acoustic Doppler Current Profilers[1],其工作原理与OS ADCP相同,是利用声学多普勒原理对海流遥测,有不破坏流场和可同时观测多层的优点[2],是目前海洋海流测量比较理想的工具。OSADCP为船载式走航测流仪,能在船只航行的情况下测量,其体积相对较大,安装难度也大,必须安装在船底,还需连接计算机机、GPS、罗径才能工作。WH ADCP主要用于大洋浮标布放(锚系或座底),港口测量,湖泊测量,河道测量,岸边测量等海洋监测中,它的特点是体积小,重量轻,携带和使用方便,能连续工作几个月,既可自容,又可直读,耗电低,精度高。在大洋的海洋调查中,连续站的海流观测方法通常是利用绞车吊放UCM、SLC等单点海流仪,投放在标准层测流,为消除船舶噪声等因素影响,一般每层观测3 min,然后取平均[3],6个层次观测时间约为20 min,层次越多,观测时间越长,对流速变化大的海区无法达到同步观测的目的。将WH ADCP用在连续站的海流观测,能达到上下层同步观测,而且得到5 min的采样间隔,精确获得海区各层海流的分布及变化趋势。大型海洋综合调查船虽然安装OS ADCP,但其不能测表层流,而且受安装、罗径、环境扰动等因素影响测量精度[4]。本文对300 KWH ADCP在调查船漂泊状态中的使用方式进行研究,并与船载式150KOSADCP结果进行对比分析。
1 吊放方式
1.1 向下测量吊放方式
在仪器吊放前,应先制作仪器架,仪器架的作用是方便仪器的吊放、维持其稳定的姿态和保护仪器,制作仪器架应注意的是探头前方15°范围内不应有障碍物。简单的仪器架如图1所示,由4根不锈钢管组成,上下有吊环,中间有两个圆盘固定仪器。向下测量吊放方式是用绞车将仪器吊放到海面,仪器探头朝下进行测流,为增加仪器的稳定可在仪器的下方吊挂铅鱼,如图2所示。仪器吊放在10 m的深度范围内且深度应大于船体吃水深度,吊放时仪器尽可能的远离船体,远离船体有声源的地方。这种方式的优点是吊放快捷,还可接上电缆实时数据显示,及时掌握仪器的状态。缺点是不能观测表层流,在恶劣海况时船体的状态和海面混响会对测量精度造成一定的影响。

图1 仪器架
1.2 向上测量吊放方式
将仪器吊放至仪器测量范围内或指定深度,探头朝上进行测量,如图3所示,这种方式测量的优点是仪器远离海面,消除了海面混响和船体的磁场等因素影响[5],而且深水流速小,能保证仪器在水下的姿态稳定,还能测表层流,恶劣海况对其影响较小,是推荐的使用方法。另外,在其下方还可增加测量仪器,仪器探头朝下,如图4所示,加大测量范围。WH ADCP的型号有多种,它的频率越小,测量范围越大,但其分辩率越低,1200K WH ADCP层长最小可设为0.25 m,但其测量范围仅为16 m以内。根据海流的变化主要在上层特点,向上测量使用分辨率高的WH ADCP 300K,层长可设为2 m,测量范围为110 m,深层海流变化小则使用范围大的WH ADCP 75K,测量范围为800 m,层长可设为16 m,仪器吊放深度为110 m,整个测量深度可达910 m。缺点是在水浅时注意仪器触底,且无法采用直读方式。
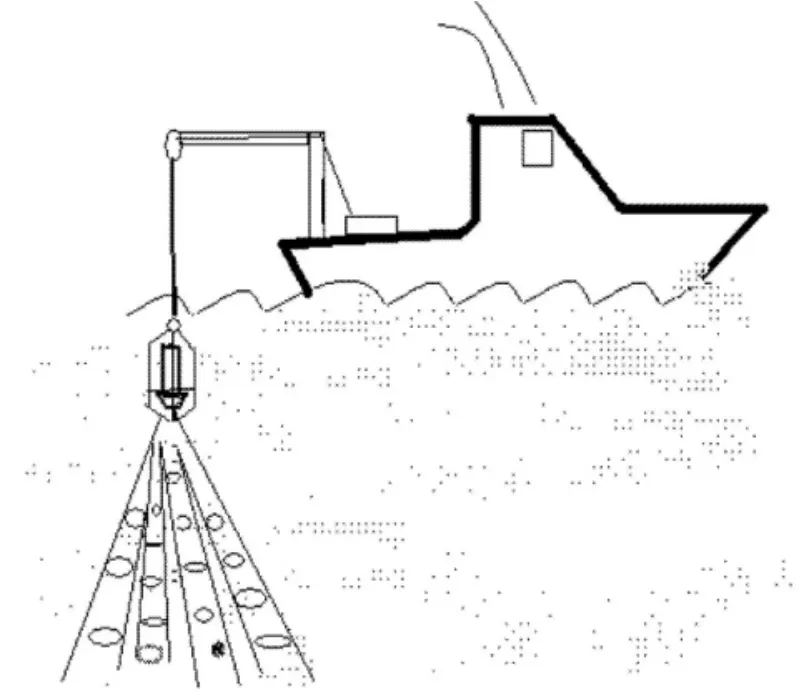
图2 仪器向下测量的吊放示意图
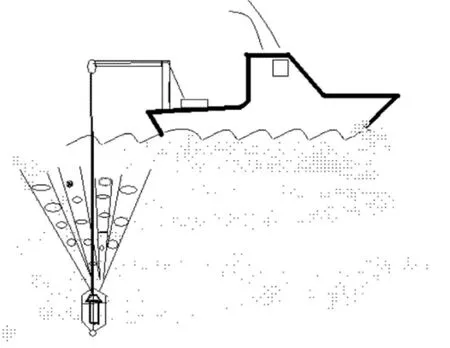
图3 仪器向上测量的吊放示意图
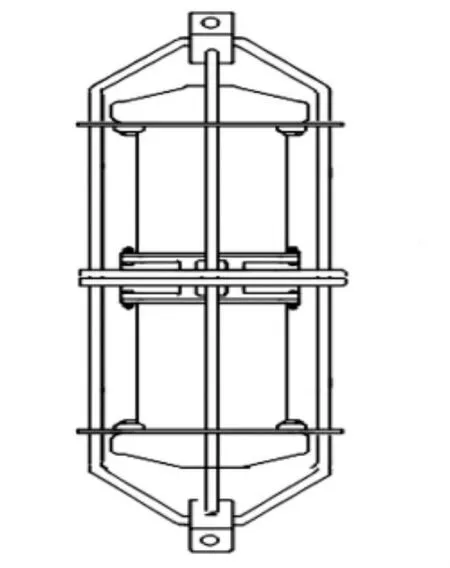
图4 双仪器吊放
2 资料预处理
资料预处理的主要内容是计算绝对流速及异常值处理。由于船的移动,仪器测的流速是相对船的流速而不是对地流速。当船抛锚时船的移速较小,基本可忽略,当船在漂泊时则船的移速较大,甚至超过流速,这时须删除船速[6]。船速的删除方法一般是利用GPS船位数据计算船速,通过矢量合成计算出真实流速。通过GPS计算船速的方法较多,常用的有逐点法、逐段法、实际航速平均法、起点终点法等,这里介绍一种适用的逐点法[7],方法是以ADCP仪器测量时间为中点将仪器测量平均间隔时间长度分为前后两段,利用GPS在前段内取 7 个连续船位 P1,P2,P3,P4,P5,P6,P7及时间 T1,T2,T3,T4,T5,T6,T7,对应后段的船位 P1′,P2′,P3′,P4′,P5′,P6′,P7′及具体时间 T1′,T2′,T3′,T4′,T5′,T6′,T7′,对应点时间差为平均间隔的一半左右。利用前后段对应两点的位置和时间计算相应的船速:νi=Si/ti,其中

Si为 Pi和 Pi′之间累积的距离,单位为 n mile,yi,yi′,xi,xi′分别为经纬度,单位为分,ti=Ti′-Ti为各段航行时间。删除船速的最大值和最小值,或是认为不可靠的数据,对剩余的5个νi值进行平均(式2)算出船速船,通过矢量合成算出绝对流速绝=相+船

异常值可采用传统的阈值判别法和变率判别法[8]。阈值判别法:根据要素可能的取值范围设定相应的阈值,超过阈值的数据即可确认为异常数据或列为可疑异常数据。变率判别法:要素的时间变化率应在一定的范围内,并具有某种规律性。可利用这一特性对异常观测值进行判别。ADCP可用来判别的要素有水平流速流向、垂直流速、完好率、回波强度、罗径值、纵横摇值等。另外还可用滤波等方法判别。异常数据的处理:根据水文要素序列的特征和分析要求,采取简单剔除或进行插值处理。测量过程中发现最多的异常值为下放或上升过程的数据,这些数据可通过垂直流速来判别。
3 测量结果分析
3.1 与VMADCP比对
利用一次海洋调查作业中使用的测流仪器300K WHADCP、150K OS ADCP进行数据分析比较,两仪器距离60 m,测量地点为南海南部,水深大于2 000 m,由于海况较差,WHADCP采用水中探头朝上方式测量,仪器投放深为105 m,采样间隔5 min,层长4 m,连续观测25 h(连续站),由于水深无法抛锚,船受风和海流影响有一定的速度,因此利用GPS信息采用逐段法计算船速。150KVMADCP探头深度为4 m,采样间隔5 min,层长8 m。为方便比较,将WHADCP与VMADCP数据通过三次样条插值方法插值到整点时刻20 m,30 m,50 m,75 m层,流速分量对比如图5和表1。
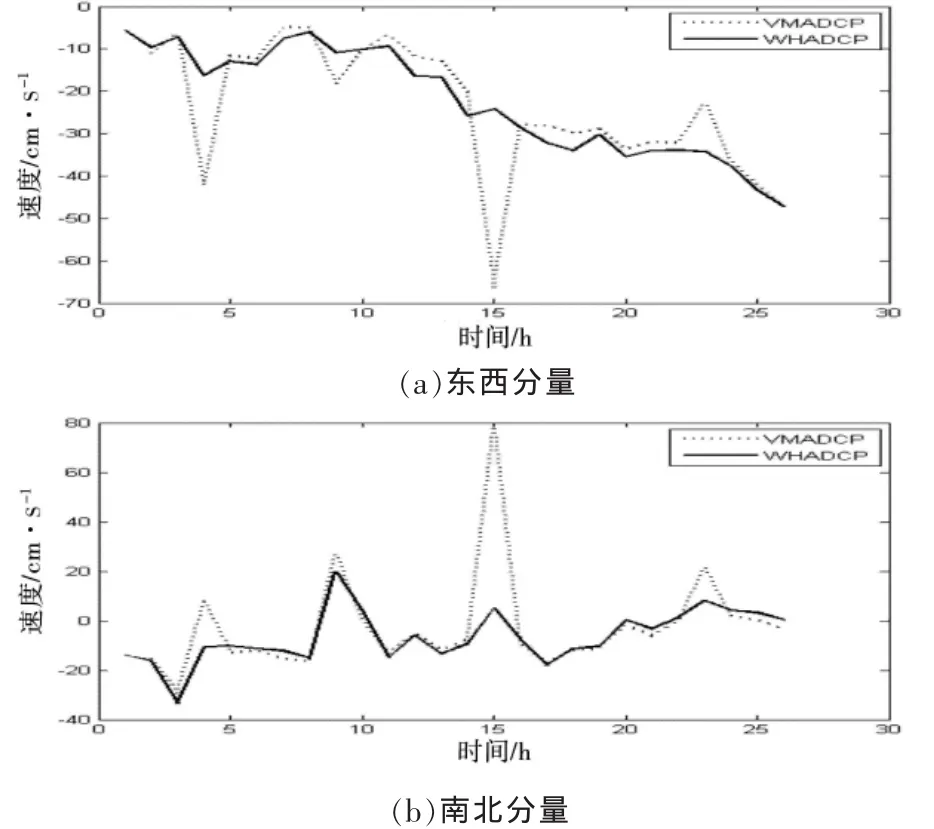
图5 75 m层流速分量图
从图5及表1可看出,两种仪器的测量数据总体趋势一致,测量值相差不大,个别相差较大的从流速的时间变化来看是由OS ADCP突变引起,从图中可判别为异常值,这跟仪器工作环境有关,OSADCP固定在船体上,受船体摇摆及海面噪声干扰大,WH ADCP放至水下105 m,消除了船体的磁场及环境干扰的等影响。
3.2 仪器姿态分析
仪器在水下的姿态变化也影响到测量的精度,姿态变化越激烈,测量效果越差,仪器姿态可做为测量数据质量好坏的判断依据。仪器在水下的姿态要素主要有纵摇、横摇和罗径,这些要素可通过仪器内部的传感器获得,图6为WHADCP在水下的姿态变化图。
图中横坐标为观测次数,采样间隔5 min,测量时风速较大,船的漂移速度也较大,圆圈变化激烈处为因船漂离测站太远,需将仪器提出水面动船返回测站造成。测量时海况为4级,仪器在水中的纵摇和横摇变化较小,最大分别为0.36°和0.67°,标准差为0.12和0.27,罗径变化率稍大,最大为19°。总体来说姿态较稳定,均达到仪器的测量要求。图7为只删除船速没有经异常值处理的矢量图,图中横坐标为观测次数,纵坐标为深度,从图中可看出,WH ADCP观测资料的异常值较少,且有很高时间分辨率和垂直空间分辨率,能很好地反映出时间和空间变化规律:海区的海流为层状结构,说明海洋密度层结对流速结构的影响非常明显[9],上层为东北流到东南流的转变,中层为东北流到西北流的转变,而底层基本维持偏北流。最上一层接近表层,测量时为西南风季节,风向为西南,流向基本与风向一致,为东北流。

表1 流速误差分析表

图6 仪器姿态图(上图为罗径,下图为纵横摇)
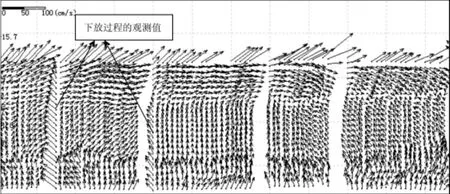
图7 WHADCP观测矢量图
4 结论
WH ADCP在飘泊状态下使用时,仪器在水下的姿态稳定,4级海况下纵横摇的倾角均小于1°,测量结果与VMADCP具有很强的一致性,且异常值明显少于VMADCP。采用向上测量方式,减少了船体磁场的影响,还能测量表层流,与VMADCP一起使用,弥补VMADCP无法测得表层的缺点,能较好在反映出海流随时间和空间变化规律,因而可用于大洋海洋调查时的连续站观测。
[1]RDInstruments.WorkHorse Technical Manual[M],1998.
[2]RDInstruments.Ocean Surveyor Technical Manual[M],1999.
[3]中华人民共和国国家质量监督检验检疫总局.GB/T12763.2-2007.海洋调查规范:海洋水文观测[S].北京:中国标准出版社,2007.
[4]刁新源,于非,葛人峰,等.船载ADCP测量误差的因素分析和校正方法[J].海洋科学进展,2006,24(4):552-560.
[5]侍茂崇,高郭平,鲍献文.海洋调查方法导论[M].青岛:中国海洋大学出版社,2008.
[6] 吴中鼎,梁广建,李占桥.ADCP 资料处理中的船速计算[J].海洋测绘,2004,24(5):13-15,19.
[7] 丁举.利用 GPS测试船舶航速的算法研究[J].船舶工程,2005,27(3):5-8.
[8]陈上及,马继瑞.海洋数据处理分析方法及其运用[M].北京:海洋出版社,1991:445-448.
[9]杜岩,王东晓,陈荣裕,等.南海西边界ADCP观测海流的垂直结构[J].海洋工程,2004,22(2):31-38.
WH-ADCP Ocean Current Measuring on Float Boat
LIANG Guang-jian1,WANG Jiang-wei2,XU Gang3
(1.The Navy Fleet of the South Sea Hydrological and Meteorological Center,Zhanjiang Guangdong,524001,China;2.Meteorological and Hydrological Bureau of the General Staff,Beijing 100073,China;3.92488 Troops,Zhanjiang Guangdong 524064,China)
WH ADCP is primarily used in mooring observatory.The standard current observation platform in the ocean research vessel survey is often UCM,SLC and other ocean current meter.As WH ADCP is small and can be used to observe simultaneously multi levels.It can be considered as a platform in the ocean research vessel surveys.The WH ADCP onboard used for marine survey is introduced.The comparison results with the OS ADCP analysis is used to prove the effectiveness of WH ADCP in continuous observation stations.
WH ADCP;OS ADCP;ocean survey;ocean current
P715;TM 170.6050
B
1003-2029(2011)04-0038-04
2011-07-16
梁广建(1969—),男,大学,高级工程师,主要从事海洋调查。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
舰船科学技术(2022年11期)2022-07-15
中国海洋大学学报(自然科学版)(2020年8期)2020-08-03
上海海事大学学报(2019年4期)2019-12-30
测控技术(2018年2期)2018-12-09
珠江水运(2018年5期)2018-04-12
上海大中型电机(2017年4期)2017-02-06
中国水运(2015年10期)2015-11-09
焊接(2015年9期)2015-07-18
中国水运(2015年2期)2015-04-23