海床基海洋环境自动监测系统的研究
2011-01-09 05:23齐尔麦常延年
海洋技术学报 2011年2期
齐尔麦,张 毅,常延年
(国家海洋技术中心,天津 300112)
海床基海洋环境自动监测系统的研究
齐尔麦,张 毅,常延年
(国家海洋技术中心,天津 300112)
介绍了一种适用于在浅海(水深100 m以内)工作的海床基海洋环境自动监测系统的工作原理和组成。对水下集成监测平台、数据采集和传输、系统布放回收等关键技术进行了深入研究并开发了海床基监测系统工程样机。系统结合水声通讯与卫星通讯技术实现了水下监测数据的实时传输;在水下集成平台的设计上采取了防拖网、防泥沙等安全性和环境适应性措施;提出了便于实施海上作业的基于自由下落方式的布放方法和基于声学释放技术的回收方法。经过海上长期试验表明该系统能够稳定可靠地在恶劣的海底环境中完成长期监测工作。
海床基;监测系统;数据实时传输
海床基海洋环境自动监测系统(以下简称海床基监测系统)是布放在海底对海洋环境进行定点、长期、连续测量的综合自动监测装置,具有长时间自动监测、隐蔽性好等特点,是获取水下长期综合观测资料的重要技术手段。随着世界范围内对海洋资源的开发利用、海洋灾害的监测与预防、海洋环境保护等工作的重视,许多发达国家正努力在本国沿海及全球大洋建立海洋立体监测系统。海底成为继海面/地面观测、空中遥测遥感之后地球科学的第三个观测平台[1],海底观测系统正逐步成为海洋技术领域的研究热点[2]。
国际上已开展了许多用于不同目的海床基监测系统技术研究,例如美国自20世纪90年代开始建设的生态环境海底观测站LEO-15[3-4]布放在离岸16 km,水深15 m的大陆架上,通过电缆/光缆与岸站连接,对海水温度和海流等数据进行长期监测;美国NOAA的DART系统利用坐底式监测设备和水面气象浮标进行海啸监测与预警;美国NeMO海底观测系统[5]布放在1 600 m水深的火山热液口附近监测海底火山活动现象。在国家863计划的支持下,国家海洋技术中心从“九五”开始开展坐底式多参数集成监测系统的研制。在“九五”期间研制的自容式海床基监测系统主要用于采集水样并监测悬浮泥沙浓度剖面和粒径谱,同时监测浪、潮、流等动力环境背景,可在50 m水深的海底连续工作1个月;“十五”期间进一步研制了具有实时传输功能的海床基动力要素综合自动监测系统[6],可在水深100 m以内的海底连续工作3个月,对波浪、水位、海流剖面、温度、盐度等海洋动力要素进行监测。本文的研究工作是在“十一五”863计划项目的支持下进行的,通过对海床基系统的多参数集成监测、数据实时传输、系统布放回收等技术进行深入研究,提高海床基监测系统的安全性和环境适应性,使其更适应于在恶劣的海洋环境下进行长期坐底监测。
1 系统总体设计
1.1 系统工作原理
本文研究的海床基监测系统是一种适用于在浅海(水深100 m以内)工作的坐底式离岸监测装置。在水下集成平台上安装了各种测量仪器和系统工作设备,水下系统用蓄电池供电。各测量仪器在中央控制机的控制下按照预设的时间间隔加电工作,对海洋环境进行监测,主要监测对象包括海流剖面、水位、盐度、温度等海洋环境要素。监测数据在中央控制机内进行集中存储,并可通过水声通讯的方式将最新数据实时传输至水面浮标系统,再由浮标通过卫星通讯或无线通讯转发至地面站。系统回收时,可在水面船只上发射声学指令遥控水下系统上浮水面。其工作过程如图1所示。
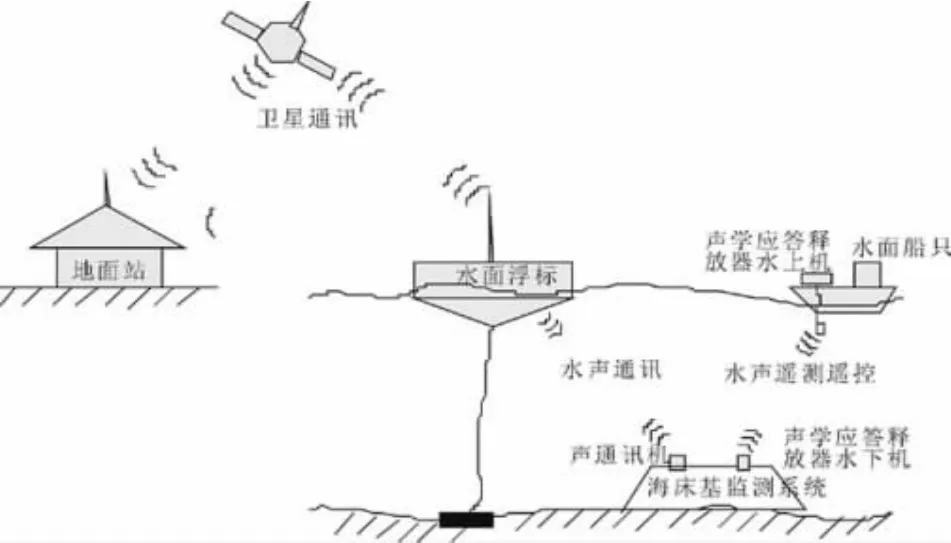
图1 海床基监测系统工作示意图
1.2 系统的组成
海床基监测系统整体组成方案如图2所示,包括水上和水下两个部分:

图2 海床基观测系统框图
1.2.1 水上部分
(1)声学应答释放器水上机:用于在系统回收时发射应答和释放控制指令。
(2)声通讯机接收机:安装在水面浮标系统上,在接收到水下系统传送的数据后,将数据送入浮标数据采集模块。
1.2.2 水下部分
(1)水下集成安装平台:包括浮体、仪器舱、配重支撑架和释放机构等,是各种仪器设备的工作平台;
(2)测量仪器:包括声学多普勒海流剖面仪(ADCP)、压力式波潮仪、温盐测量仪;
(3)系统设备:包括中央控制机、声学应答释放器水下机、定时释放器、安全报警器(当水下设备上浮水面时,通过手机短信或卫星通讯发出警报信息)、电池舱及声通讯发射机。
1.3 主要功能与技术指标
(1)最大工作水深:100 m;
(2)水下连续工作时间:90 d;
(3)工作方式:水下定点监测,正点采样,每天24次;
(4)测量参数技术指标如表1所示。

表1 海床基监测系统测量参数表
2 关键技术的研究
2.1 水下集成平台的设计
水下系统整体结构如图3所示。其外形呈封闭的梯台状且表面无易勾挂的结构部件。其结构布局总体上可分成上下两部分,由释放机构连接。上部为仪器舱,安装多种传感器和设备,其顶部安装浮体;下部为配重支撑架,配置重物。声通讯机、声学海流剖面仪及声学应答释放器等声学仪器和安全预警器安装在仪器舱上部,上覆透声罩防止拖网勾挂并起到保护作用;温盐仪、中央控制机、水位计和两个电池舱安装在仪器舱下部。
系统的主要结构物理特性如下:

图3 海床基观测系统结构示意图
(1)外形尺寸:整体高度为1.3 m,基座底部的最大尺寸为 2.2 m×2.2 m;
(2)重量和浮力:系统在空气中的总重量约为600 kg,在水中的净重量为184 kg。回收时自动上浮的部分净浮力为76 kg,基座配重部分在水中的净重为260 kg;
(3)重浮心:系统重心和浮心基本位于结构中轴线上,偏离量不超过1 cm。重心距离底板645 mm,浮心距离底板755 mm。
在水下平台的结构设计上采取了防拖网、防掩埋、防倾覆和防污损等安全性和环境适应性措施:
(1)结构平稳性:系统的结构布局保证了重浮心配置的合理性,在姿态发生倾斜时会产生较大的回复力矩并保持平稳,使得系统具有良好的抗倾覆性。
(2)防泥沙掩埋:基座底部的配重板起到防沉阻尼板的作用,配重支撑架和仪器舱之间具有较大的空间,作为海流通道。由于系统仪器舱被支撑到一定高度,即使基座部分受到一定程度的掩埋,也不会影响仪器设备的在回收时自动上浮水面。
(3)防拖网设计:系统整体外形呈梯台状,底盘较大,顶部用透声材料制作顶罩。在外形结构较为顺滑,无易勾挂的结构,有利于渔船拖网经过时顺利滑过。
(4)防腐蚀和污损:为防止受到海水腐蚀和海生物附着而导致系统结构部件的的损毁,系统采取了“三防”处理措施,在结构部件表面涂敷防腐蚀和防生物附着涂料,在不同金属材质的结构件之间采取绝缘隔断;在重要部位安装牺牲阳极。
2.2 数据采集和传输
2.2.1 数据采集
系统配置的声学多普勒海流剖面仪(ADCP),工作频率为470 kHz,可工作在水深100 m的海底,自底向上测量布放点海底至海表面的多层海流速度和方向,典型情况下剖面层间距为1 m;压力式波潮仪在系统工作水深小于30 m时可用于测量水位和波高、波周期等参数,当系统工作水深大于30 m时,采用压力式测量波浪的方法已不适用,故仅提取其水位数据;温盐测量仪用于测量海底的温度和盐度。
测量仪器在中央控制机的控制下,以预置的采样周期对海洋环境要素进行监测。测量数据分别在各个测量仪器内部和中央控制机存储器内进行存储;数据发送到水面浮标后,在浮标内部和岸站接收端也对数据进行存储。这种多点存储、互为备份的方式有利于保障测量数据的完整性,并可通过相互比对来检验数据传输的有效性和测量数据的质量。
2.2.2 数据实时传输
由测量仪器、中央控制机、声通讯机、浮标数据接收模块、卫星通讯模块、地面接收站构成了海床基监测系统数据实时传输链路。水下系统每间隔1 h(可设置)采集一组测量数据并通过数据实时传输链路将最新数据传送回地面站。
在整个传输链路中,水声通讯环节是沟通水下和水面系统的关键环节。在海洋环境中,水声通讯是最适宜用于远距离无缆数据传输的方式。但同时,复杂的海洋声场环境对水声通讯的效果也有较大影响,在浅海应用时声场环境更显恶劣。系统配置的声传输机的最大传输距离可以达到3 000 m,在系统设计上采取以下措施保障通讯效果。
(1)声通讯发射机安装在水下平台顶部,水面接收机安装在浮标底部并探入水下约2 m,尽量避免由于结构干涉、遮挡等原因影响声通讯效果。
(2)水下系统集成的多种声学设备选用不同的工作频率且分时工作(ADCP470 kHz,声学应答释放器15 kHz,声传输机12 kHz),避免声信号之间的干扰影响通讯。
(3)水下系统在对监测原始数据进行存储并进行必要的处理后,形成特征数据传送至水面,压缩声传输数据量以保障数据传输的可靠。特征数据中包含水下系统的姿态数据(方向角、倾斜角和摇摆角),可用于判断水下系统是否平稳坐底。
2.3 系统能源供给
作为一种离岸工作的坐底式观测系统,无法如水面浮标那样利用太阳能进行能量补充,如果通过海底电缆从陆地上向水下系统供电,则成本较高且在很多情况下难以实现。现实可行的能源供给途径就是系统自身配备足够的储能电池并进行合理的用电管理,以达到系统在水下长期工作的目标。
根据对水下仪器设备的能耗计算并考虑到水下低温环境对电池实际可输出能量的影响,本文研制的海床基监测系统配备了可支持各仪器设备连续工作3个月并留有30%以上余量的储能电池,其重力负载在整个水下系统的总重量中占据相当大的比重。在系统用电管理方面,水下工作仪器在电路设计上尽量选用低功耗器件,对功耗较高的器件则只在必要时供电以减少耗电量;中央控制机根据系统的工作流程在必要时为系统中的用电设备开通电源,其它时间则停止供电,减少仪器的待机功耗。
2.4 系统布放与回收
2.4.1 系统布放
系统布放时通过脱钩装置与布放船只的吊杆连接并吊放至水面以下,然后脱钩使其自由下落海底。这种布放方式简化了海上布放的作业程序,降低了对作业船只和配套设备的要求,有助于提高系统布放的可操作性。
系统在布放下落过程中受到重力、浮力以及水阻力的作用。通过仿真计算和试验测试可知,在系统自由下落过程中,下落速度在很短的时间内(t<2s)收敛于一个稳定值,约为0.6 m/s。本文在研究过程中,根据《HY 016.12—1992海洋仪器基本环境试验方法 冲击试验》,对系统上集成的仪器设备进行了冲击试验,并在室内水池(水泥底)进行多次布放试验。试验结果表明系统可在落底冲击的条件下,保持机械和电气性能的完好。在系统下落过程中受到侧向海流的干扰而发生姿态倾斜时,系统的重浮力会产生一个将其扶正的回复力矩,保障其姿态不会失控。根据系统的结构物理特性和水阻力特性分析,在侧向海流速度为0.5 m/s时,系统结构倾斜角度可控制在15°以内,完全可以安全坐底。
2.4.2 系统释放回收
系统回收时,在水面船只上通过声学应答释放器水上机发出水声遥控释放指令,声学应答释放器水下机收到指令后控制释放机构执行脱钩动作,使仪器舱在浮体带动下上浮水面。系统内预存高强度绳索,其两端分别连接到仪器舱和配重基座。当仪器舱浮出水面时,配重支撑架作为一个重锚将上浮部分锚定,使其不会随海流飘走而丢失。在将仪器舱回收后,可通过连接绳索将配重支撑架一并回收。
在意外情况下,若声学释放器不能正常工作而使得水下系统无法收到水面释放指令,可依靠定时释放器在设定的最后时刻控制释放机构脱开,使系统上浮并回收。通过采用两种控制手段对释放执行机构进行并联控制有效的提高了系统回收的可靠性。
3 海上试验与应用
本文研究过程中进行了大量的海上试验工作对系统技术进行全面的验证和考核。图4所示为海床基监测系统在台湾海峡中线北部海区进行长期试验过程中,海上布放和回收时的现场情况。该试验海区水深约为70 m。
通过长期的海上试验,海床基监测系统获取了大量监测数据。系统在水下连续工作时间超过90 d,试验期间多次经受台风造成的恶劣海况的考验,在监测任务完成后利用声学遥控手段安全、顺利回收,验证了系统布放、回收的可靠性和海上长期工作的安全性、环境适应性。

图4 海上试验现场情况
4 结论与展望
本文对海床基多参数集成平台技术、数据实时传输及布放回收等关键技术进行了深入研究,在此基础上研发了具有数据实时传输功能的多参数海床基监测系统。经过海上长期试验的验证,具有较高的可靠性和环境适应性。在实际应用中,还可根据实际需要调整传感器的配置,构成面向特定任务水下综合测量系统。在海洋防灾减灾、海洋工程建设、海洋科学研究及海洋军事等众多领域具有广泛的应用前景。在未来建设海底监测网的工作中,海床基监测系统技术也是一项重要的基础技术。
[1] 汪品先.走向深海大洋:解开地球的隐秘档案[J].科技潮,2005,1:24-27.
[2] 陈鹰,杨灿军,陶春辉,等.海底观测系统[M].北京:海洋出版社,2006:65-69.
[3]Von Alt C J,J F Grassle.LEO-15:An unmanned long-term environmental observatory[C]//Proceedings,Oceans 92,Newport,Rhode Island,1992.
[4]Von Alt,M P Deluca,S M Glenn,et al.LEO-15:Monitoring and Manging Coastal Resources[J].Sea Technology,1997,38(8):10-16.
[5]陈鹰,潘依雯.深海科考探险日记[M].杭州:浙江大学出版社,2004:44-65.
[6]孙思萍.海床基海洋动力要素自动监测系统[J].气象水文海洋仪器,2004,6:26-30.
Research on the Seabed Based Automatic Environmental Monitoring System
QI Er-mai,ZHANG Yi,CHANG Yan-nian
(National Ocean Technology Center,Tianjin 300112,China)
The working principle and construction of a seabed based automatic environmental monitoring system are introduced,which could serve in the shallow sea(<100 m).Based on the research of key technologies such as underwater monitoring system and data sampling and transmission,the engineering prototype system is developed.Acoustic communication and satellite communication technologies are integrated in this system to realize real-time data transmission of the underwater system.The structural design of the system gives it better security and adaptability in the case of trawling or silt covering.The system could be deployed with free-falling manner and be withdrawn conveniently under the control of an acoustic releaser.Long-term ocean experiments have been carried out to test and verify the technologies mentioned above.
seabed based;monitoring system;real-time data transmission
P715.2
A
1003-2029(2011)02-0084-04
2011-03-23
国家高技术研究发展计划(863计划)资助项目(2006AA09A301-5)
猜你喜欢
茶叶通讯(2022年2期)2022-11-15
茶叶通讯(2022年3期)2022-11-11
机械研究与应用(2022年4期)2022-09-15
家庭影院技术(2020年6期)2020-07-27
家庭影院技术(2019年1期)2019-01-21
家庭影院技术(2018年11期)2019-01-21
家庭影院技术(2018年10期)2018-11-02
中国海洋大学学报(自然科学版)(2018年11期)2018-10-15
中国海洋大学学报(自然科学版)(2017年7期)2017-06-05
中国科技信息(2016年19期)2016-10-25