极地近岸海洋环境监测系统的研制及应用
2011-01-09 05:23王项南刘松堂石建军麻常雷
海洋技术学报 2011年2期
王项南,刘松堂,石建军,田 川,朱 锐,麻常雷
(国家海洋技术中心,天津300112)
极地近岸海洋环境监测系统的研制及应用
王项南,刘松堂,石建军,田 川,朱 锐,麻常雷
(国家海洋技术中心,天津300112)
目前极地海洋环境监测只能采用船基调查方式在南极夏季进行,在国家“十一五”863计划的支持下,设计研制了极地近岸海洋环境自动监测系统,该系统能够对包括温度、盐度、深度、pH、有效光合辐照度(PAR)、氧化还原电位(ORP)、叶绿素、海流等在内的生态要素及动力要素进行自动长期监测。该系统布放在南极长城站近岸海域,获得了大量的连续监测数据。文章主要介绍系统组成、结构设计、系统控制和系统通信以及现场试验情况等。
极地;近岸;海洋环境;自动监测
极地作为地球系统的重要组成部分是全球气候变化的重要敏感区和驱动区。进行极地海洋环境的监测与研究,对于揭示极地海洋环境的快速变化及其对地球变化的响应与反馈作用具有重要意义。但是受极地恶劣气候条件的限制,目前对极地海洋环境的调查活动主要集中在南极无冰的夏季,采用传统的船基调查方式开展。由于海冰的限制,对极地冰下(或水下)观测手段还很缺乏,无法得到全年连续的监测数据。这大大制约了对相关海洋科学过程的深入研究。为了能够深入了解极地海洋的物理和生物学过程,分析生态系统与环境快速变化之间的相关性,以我国南极长城站近海作为试验区,研制了一套适用于极区的站基海洋动力和生态环境自动监测系统,并分别于2009年11月—2010年1月、2010年11月—2011年1月随中国第26次、第27次南极考察队在南极长城站长城湾海域进行了布放和运行。
1 系统组成
系统按功能分为水下测量系统、数据传输和供电系统、数据接收系统三部分。水下测量系统对包括温度、盐度、深度、pH、有效光合辐照度(PAR)、氧化还原电位(ORP)、叶绿素、海流在内的生态要素及动力要素进行长期连续监测;数据传输和供电系统即数据传输和供电电缆,由岸站实验室引出经桥架进入潮间带预埋管,之后沿着海底连接到水下数据采集系统,主要负责岸站到水下测量系统的供电传输,并将水下测量系统采集的数据传至岸站实验室的上位机;数据接收系统由上位机及数据采集软件组成,负责定时从水下测量系统读取监测数据(系统示意图见图1)。
水下测量系统由剖面测量部分和坐底测量部分组成。剖面测量部分主要由第一层剖面测量单元、第二层剖面测量单元、第三层剖面测量单元组成,其中第一层剖面测量单元、第二层剖面测量单元固定在承重缆上对温度、盐度、深度、叶绿素、PAR、ORP和pH七个参数进行测量,第三层剖面测量单元固定在坐底平台上对温度、盐度、深度三个参数进行测量。坐底测量部分即测量海流的ADCP,固定在坐底平台的常平架上。水下测量系统的示意图如图2所示。
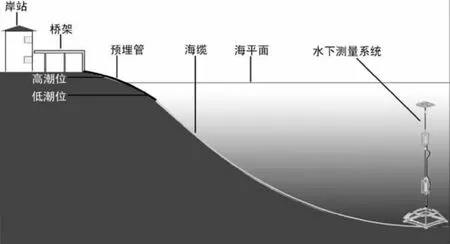
图1 系统示意图
2 结构设计
系统的结构设计主要包括系留部分及控制舱的设计。系留部分包括坐底平台、Kevlar承重缆、主浮体、释放机构、常平架以及系统连接装置。
2.1 系留部分的设计
2.1.1 坐底平台
坐底平台有锚定整个系统、安装常平架、控制舱、释放机构等功能。为保证系统的稳定,坐底平台必须有足够的重量。但是考虑系统布放和回收的难度,坐底平台不宜过重。坐底平台采用“天圆地方”的框架结构,材料选用316L不锈钢棒。平台上除了安装用于固定ADCP的常平架外,还要固定释放机构、控制舱等。根据力学计算结果,通过增减锚块调节坐底平台的沉重。
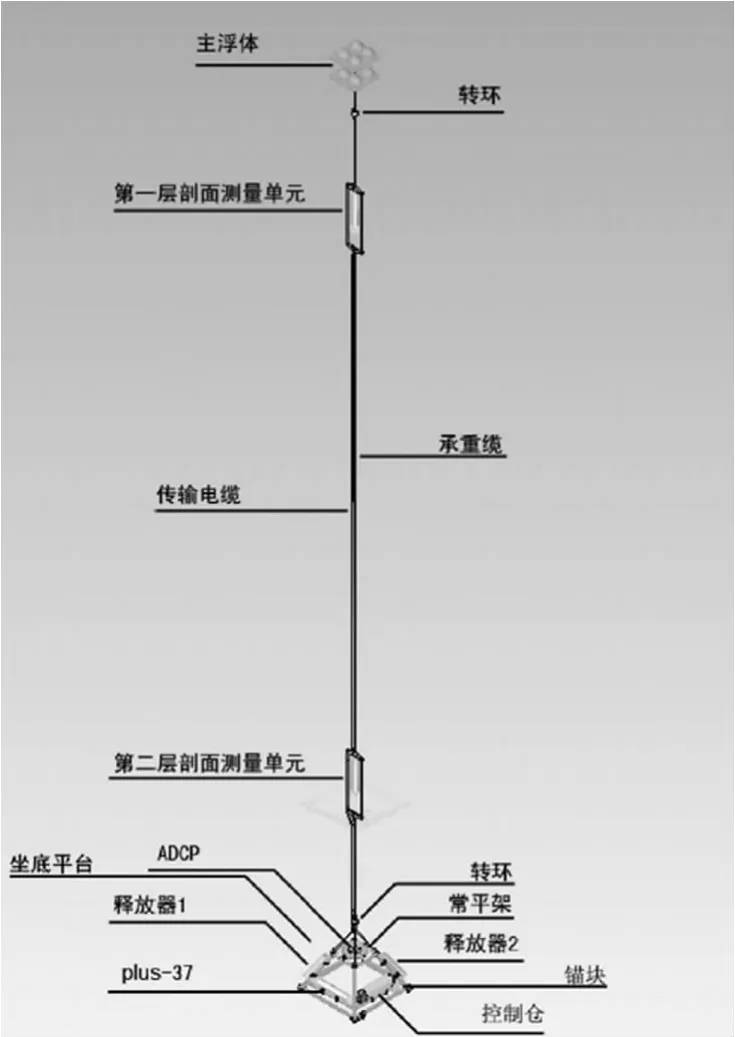
图2 水下测量系统示意图
2.1.2 常平架
常平架又称万向环,由底盘、外转环、内转环、转轴和连接板四部分组成(见图3)。本系统中常平架内置于坐底平台的顶部,其上固定ADCP,通过沿两个垂直的转轴旋转保持ADCP竖直工作姿态。常平架的材料选用316L不锈钢,其表面进行防腐喷涂处理。
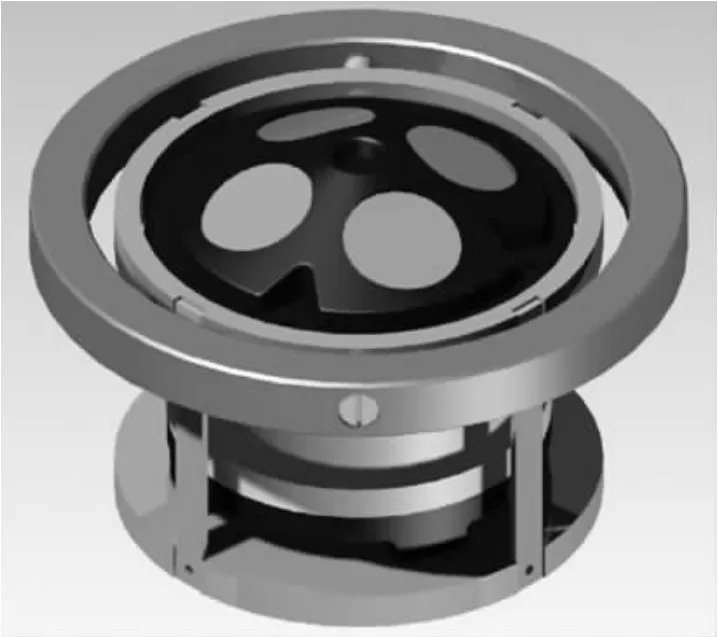
图3 常平架及ADCP
2.1.3 连接装置
在系留系统中通过特殊材料加工的卸扣将主浮体、承重缆、测量单元、坐底平台等依次连接。在主浮体和第一层剖面测量单元之间接入防腐材料制成的转环以释放海流带给系统的扭矩。
2.2 控制舱的设计
控制舱(见图4)用来放置控制电路、数据采集电路等。控制舱外壳选用耐腐蚀的聚甲醛材料,控制舱的设计考虑了耐压、密封等问题。同时,由于控制电路放置于舱内,故控制舱内部结构设计采取了防电磁干扰措施。

图4 控制舱
系统的结构设计完成后,其水下工作平台示意图如图5所示。

图5 坐底平台及其搭载设备
3 系统控制
3.1 控制电路原理图
系统采用单片机实现测量系统的电源控制和数据采集功能。电缆数据传输采用串行通信的方式,由于是长距离(传输距离1 km)传输,综合考虑选用RS485总线实现系统数据传输。
系统的测量传感器包括第一层的SBE16-A,第二层的SBE16-B以及底层的SBE37和ADCP。测量数据通过双4通道的模拟开关,再经RS232接口芯片进入C8051单片机,然后由RS485接口芯片经RS485/RS232转换器传输到上位机。为了提高数据的安全性,对第一层第二层传感器附加储存器对测量数据实时存储。数据信息的传输过程见图6。
3.2 系统供电
系统采用岸基有缆低压直流传输方式供电,水下部分采用DC-DC电源模块供电。由于电缆长期暴露在低温环境中,要求其具有良好的抗低温性能。为提高其耐磨性,防止海底对电缆内部电源线和信号线造成损伤,外加两层聚氨酯护套,中间采用铠装保护。

图6 系统电路原理图
3.3 系统数据采集
从传感器到控制舱间的传输,考虑到距离较长,第一层和第二层传感器的数据采集采用RS485总线实现传输;底层的ADCP和CTD距控制舱较近,采用RS232串口传输。
软件设计方面,根据数据类型和海水层的不同,对第一层和第二层传感器采集数据进行时序设定,将两层数据采集时间错开,两层的数据采集时间分别为t0和t1(图7)。底层包括CTD和ADCP两个传感器,故也要分时进行数据采集(图8)。
在采集数据时序划分基础上,进行软件设计,对各个传感器的采集数据是按照时序顺序执行,直到最后发送出去由上位机通过RS232接收,发送流程如图9所示。

图7 第一、二层传感器数据采集时序

图8 底层传感器数据采集时序

图9 下位机数据打包发送程序流程图
4 系统通信
水下测量系统与岸站实验室内上位机之间的数据通信过程为上位机定时向水下采集系统发送采样指令,水下采集系统接收到采样指令后分时对各层传感器单元进行数据采集,然后把采集到的各传感器数据打包发送回上位机,上位机接收并处理数据。上位机软件利用面向对象的编程语言Visual Basic 6.0开发。
上位机软件包括三大功能:控制指令的发送及数据接收功能;自动发邮件功能;数据回放功能。前两个功能为定时自动执行,数据回放功能为手动执行。上位机定时通过串口向下位机发送控制指令,下位机接收控制指令并依次采集各个传感器数据,数据打包以后立即由串口发送至上位机,上位机接收数据包,在上位机软件界面上显示各传感器测量数据,并把数据按固定格式分别储存到指定路径下的两个文本文件:一个仅保存当日的采集数据;另一个保存所有采集到的数据,每次的采样数据都追加保存。上位机自动把保存当日数据的文件以附件的形式发送到指定电子邮箱。
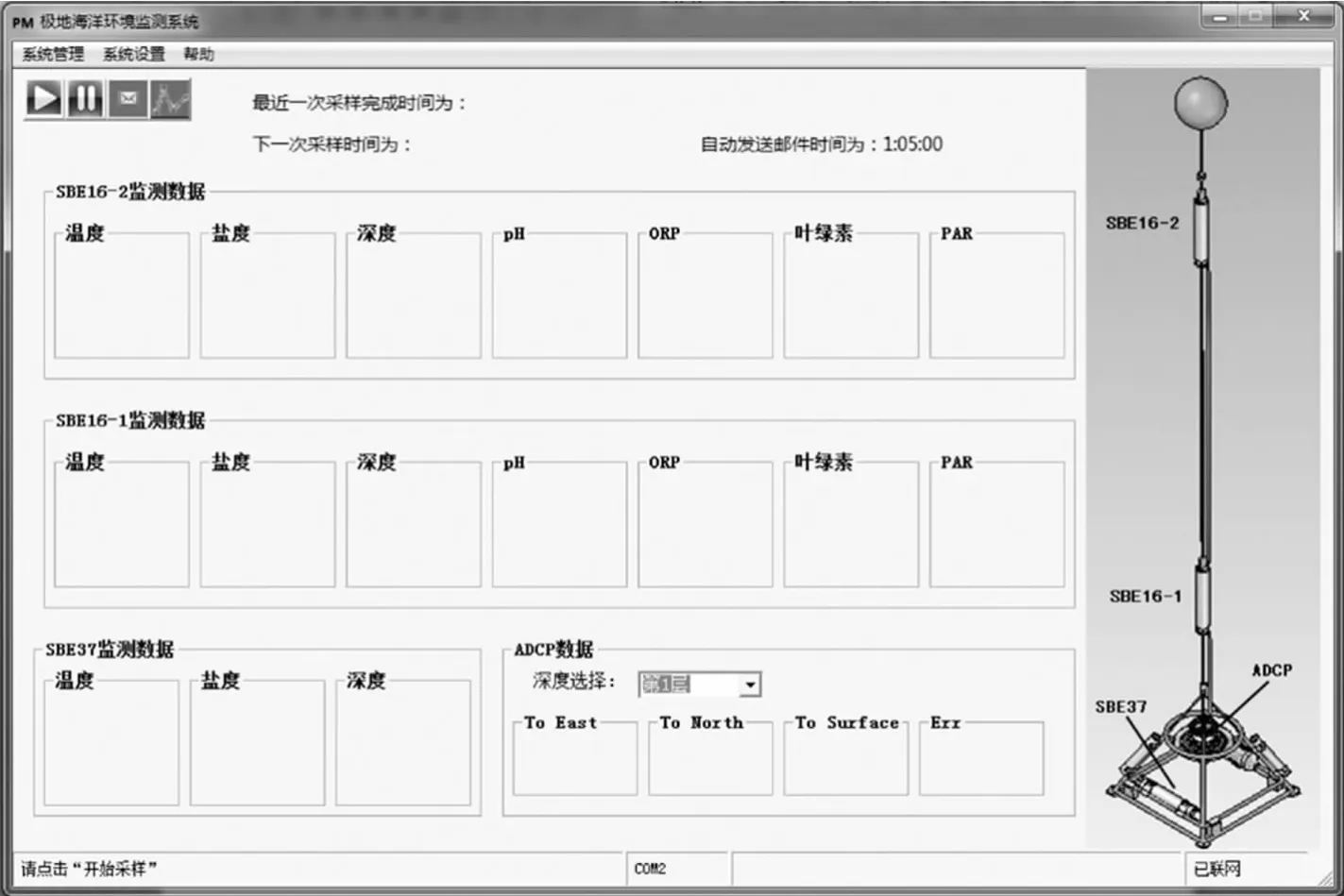
图10 上位机软件显示界面
4.1 控制及数据接收功能设计
上位机通过“问答式”对下位机进行控制,上位机向下位机发送采样指令,下位机接收到采样指令后对进行分时采样,然后把数据打包发回,上位机收到数据后进行储存,同时在上位机软件界面上显示最近一次的采样数据。上位机软件界面如图10所示。
上位机通过串口与下位机之间进行控制指令及监测数据的传输。在程序设计过程中,通过引用或设置MSComm控件的属性、事件和方法,实现上位机与下位机的串口通信。上位机控制指令的发送及监测数据接收流程如图11所示。
上位机开始工作后,到达时间点后向下位机发送采样指令,下位机开始将采样数据包传输至上位机,接收完成后,上位机界面显示各传感器测量数据。采样数据同时被保存为文本文件,如图12所示。
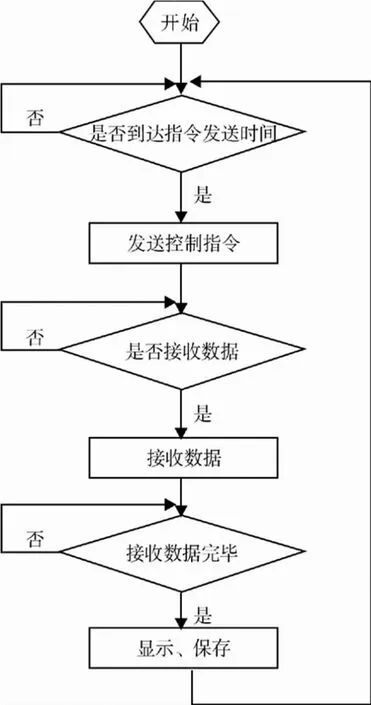
图11 控制及数据接收功能流程
4.2 自动发邮件功能设计
自动发邮件功能是定时把当日数据文件发送至指定邮箱。这样科研人员能够及时方便地获取南极长城湾海域生态环境及动力要素的监测数据。自动发邮件流程如图13所示。
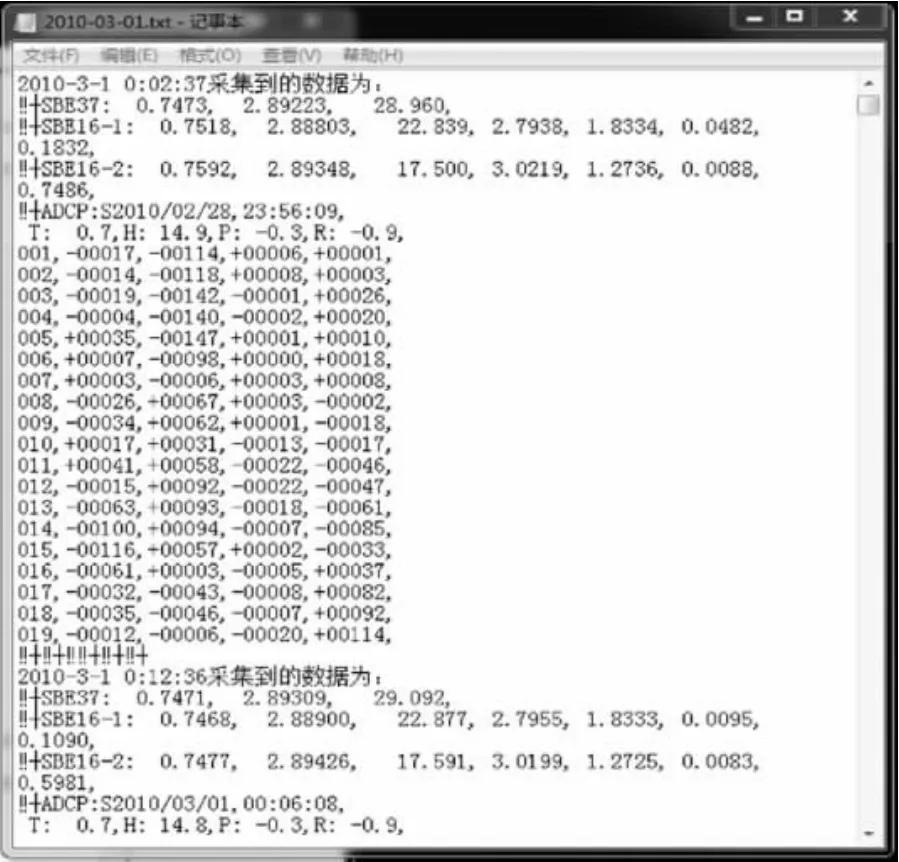
图12 采样数据在文本文件中的保存形式

图13 自动发邮件功能流程
4.3 数据回放功能设计
上位机软件将数据保存后,不能直观查看某一传感器测量值的变化趋势。数据回放功能把各个测量值单独绘制随时间变化曲线,便于查看其随时间的变化趋势。选择单日数据文件进行数据回放时,绘制当日数据曲线;选择总的数据文件进行数据回放时,可以查看各个选定时间段内的数据曲线。数据回放流程如图14所示。
利用微软MSChart控件绘制数据曲线图。添加MSChart对象以后,通过 ChartType,Title,Footnote,Plot等属性对图表类型和外观显示等信息进行设置。采样数据按照图12中的格式进行保存,把各传感器数据从各次采样的数据中提取形成一个按采样时间排列的数组,再将数组赋值给MSChart对象的ChartData属性绘制出对应传感器数据的曲线图。数据提取过程如图15所示。

图14 数据回放流程

图15 提取传感器数据流程
5 现场试验
现场试验的目的是要考核系统在南极环境中工作的可靠性,获得长期监测数据。2009年11月—2010年1月,2010年11月—2011年1月随中国第26次、第27次南极科学考察队赴中国南极长城站进行了系统的现场试验。
第一次现场试运行以及第二次现场试验期间,该系统一直工作稳定。现场试验结果表明系统能够按照设计要求正常工作,水下测量系统到上位机的通讯正常,测量数据经上位机软件打包后能够通过邮件形式在每天指定时间发送到互联网上。
6 结论
极地近岸海洋环境监测系统是目前为止南极近岸海域唯一的自动连续监测系统。使用期间,该系统工作稳定,并连续获得了数万组有效数据。现场试验表明该系统是克服南极恶劣环境、替代人工进行极区海洋环境监测的有效尝试。极地近岸海洋环境监监测系统的研制成功及业务化运行,不仅可以为极地海洋科学工作者提供连续的极区监测数据,对深入研究极地海洋环境变化乃至于气候变化都具有重要的科学意义。
[1] 王明午.深海潜标系留系统的设计[J].海洋技术,1989,8(1):7-14.
[2]宋铭航.单点锚定紧绷型千米深海潜标系统的设计和计算[J],海洋技术,1989,8(1):1-6.
[3]林卓然.VB语言程序设计[M].北京:电子工业出版社,2009.
[4]周智海,刘志勇.海洋环境监测数据卫星通信系统技术研究与设计[J],海洋技术,2003,3(1):58-62.
[5]马玉春,宋瀚涛.串行通信协议的研究及应用[M].2004:228-232.
[6]http://www.mooringsystems.com
[7]Scavia D Sissenwine, McPhaden J J.NOAA′s Ocean Observing Programs[J].Oceanography,2003,16(4):61-67.
[8]Group on Earth Observations(GEO).http://earthobservations.org/
[9]Global Earth Observation System of Systems Tools.U.S.Environmental Protection Agency.http://www.epa.gov/geoss/eos/epa_eos.html
[10]The Global Observation System of Systems(GEOSS)10 Years Implementation Plan.http://www.earthobservation.org/
Development and Application of the Polar Coastal Marine Environment Monitoring System
WANG Xiang-nan,LIU Song-tang,SHI Jian-jun,TIAN Chuan,ZHU Rui,MA Chang-lei
(National Ocean Technology Center,Tianjin 300112,China)
Aimed at the limitation that the polar marine environment monitoring can only be carried at summer based on ship presently,a polar coastal marine environment monitoring automatic system has been developed sponsored by the Eleventh Five-year“863” project.The system could automatically monitor the parameters including C,T,D,pH,PAR,ORP,CHL,current continually.The system has been deployed in the coastal area at the Great Wall station of China.A large amount of continue monitoring data have been acquired.The system composition,machinery design,system controlling and system communication have been introduced.
polar;coastal;marine environment;automatic monitoring
P714
B
1003-2029(2011)02-0035-06
2011-03-22
国家高技术研究发展计划(863计划)资助项目(2007AA09Z121)
猜你喜欢
小哥白尼(趣味科学)(2022年5期)2022-08-15
奥秘(2022年6期)2022-07-02
中华戏曲(2018年1期)2018-08-27
当代教育(2018年1期)2018-04-25
翠苑(2017年6期)2017-09-08
中州建设(2017年1期)2017-07-12
小学阅读指南·低年级版(2017年1期)2017-03-13
铁道通信信号(2016年12期)2016-06-01
测绘科学与工程(2016年5期)2016-04-17
电子器件(2015年5期)2015-12-29