
20 kg级便携式自主水下机器人(AUV)设计与实现*
2011-01-08 08:15王芬清张洪进
中国海洋大学学报(自然科学版) 2011年7期
王芬清,何 波,张洪进
(中国海洋大学信息科学与工程学院,山东青岛266100)
20 kg级便携式自主水下机器人(AUV)设计与实现*
王芬清,何 波,张洪进
(中国海洋大学信息科学与工程学院,山东青岛266100)
便携式AUV具有结构紧凑、机动性好、制造和使用成本低等优点,本文设计AUV的底层控制系统和自主导航系统,并进行仿真验证和人工湖试验,结果证明底层控制系统具有很好的鲁棒性,基于AHRS、数字罗盘和GPS的惯性导航算法能够通过浅水节点潜航方式实现AUV自主导航。
便携式AUV;底层控制系统;惯性导航;AHRS
AUV代表了未来水下机器人技术的发展方向,是当前世界各国研究工作的热点。AUV在水下面临着复杂的海底环境,底层控制系统必须要有足够的可靠性以完成高层的相关指令并防止AUV发生碰撞或丢失[1]。自主导航能力是AUV有效应用和安全回收的关键技术,但由于受其大小、重量、电源使用的限制及水介质的特殊性、隐蔽性等因素的影响,实现AUV的精确导航是一项艰难的任务。
本文研制的AUV是1种鱼雷形的微小型自治水下机器人,具有性能良好的运动控制系统,可根据不同需要挂载仪器设备,完成相应的水下探测任务。AUV的设计主要包括机械系统设计、电控系统设计以及系统的整合。机械系统由铝合金密封舱和推进器构成。密封舱分为2部分:前舱放置传感器系统,后舱放置推进器驱动系统,2个密封舱的中间放置垂直推进器。推进器用来实现AUV的运动。电控系统由参数采集监测和推进器驱动2部分组成,主要负责通信、系统状态参数采集、推进器控制、外挂设备管理等功能。AUV配备无线通信平台,接收预编程指令后即可进行自主作业任务。AUV内部采用CAN总线等多种通信方式。
传统的AUV的水下导航定位依赖于舱内的多传感器系统,如主动声纳、避碰声纳、DVL、GPS、陀螺仪等,传感器系统采集数据上交至岸基或母船计算机进行处理,完成AUV的路径规划和控制决策等相关任务。
本文的小型AUV搭载有AHRS、数字罗盘、GPS,并设计了“浅水节点潜航”方式的自主导航算法,在湖试中取得了预期的效果。
1 小型AUV机械结构设计
AUV采用推进器作为运动控制部件,推进器产生的推力是水动力,其具备3个自由度的运动,即进退、潜浮和转艏。
其中水平推进器T1布置在AUV尾部,控制AUV进退;垂直推进器T2布置在2个舱体之间,控制AUV潜浮。推进器布置如图1所示,粗箭头表示推进器。

图1 AUV推进器布置Fig.1 A rrangement of AUV thrusters
方向舵布置在AUV尾部,控制AUV转艏。
综上所述,AUV整体机械外形设计效果见图2。

图2 AUV机械外形设计图Fig.2 AUV mechanical system schematic
电控系统主要包括传感器参数采集监测和推进器驱动的设计。
参数采集监测 电控系统作为AUV指挥中心必须能够实时处理采集的数据并做出相应动作,包括测量AUV航行速度、电源电压和电流、监测水密舱的密封情况以及接收其他机载传感器传回的数据。
AUV参数采集监测系统见图3:

图3 AUV参数采集检测系统Fig.3 AUV data collection system
主控单片机采用美国M icrochip公司的DSC(数字信号控制器)系列高端16位单片机,它集成了单片机(MCU)的控制功能以及数字信号处理器(DSP)的计算能力和吞吐能力[2]。推进器驱动 为对AUV的运动进行良好控制,可将其运动按水平和垂直2个方向进行分解,这样可以设计2套独立的推进系统来实现进退、潜浮、转艏3个自由度的运动[3]。
推进器采用性能优异的200 W直流电机,其具有良好的启动特性和调速特性,电机驱动采用了无接触式的纹波测速,微控制器采用M icrochip公司的dsPIC30F4011,集成了6路电机控制PWM信号生成模块,该模块简化了产生多种同步脉宽调制输出的任务,集成了10位A/D转换器、9个模拟输入引脚、能对多达4个模拟输入引脚进行同时采样等等,方便了参数采集系统的设计。
电机驱动部分采用IR公司的驱动器:R2136和MOSFET:FP054N构成桥式可逆PWM驱动电路。IR2136采用了600 V BCDMOS工艺,其源极耐压为600 V,芯片集控制电路,电平转换,低阻抗输出和识别保护为一体。该驱动电路只需几个外围分立元件就可使桥式电路的逻辑控制信号与MOS栅极器件完整连接,采用它可以使功率系统的设计时间缩短,尺寸减小,成本降低,可靠性提高。
总体电机驱动电路的原理示意图见图4,该电路可以驱动最大电压600 V,最大电流80 A的直流电动机,实现10%~99%占空比可逆PWM运转。电机采用双闭环PID调速,内环为电流环,外环为转速环。
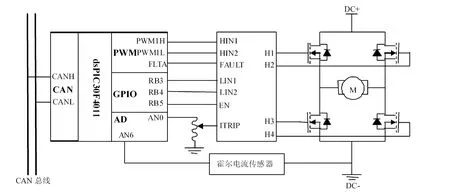
图4 直流电机驱动电路Fig.4 DC motor driver circuit
舵机驱动采用步进电机控制系统。步进电机角位移与输入脉冲严格成正比,用其组成的开环数控系统具有动态响应快、控制精度高、成本低而且性能可靠等优点。
3 AUV整机组装
AUV内部具有无线总控制板、CAN转RS232有线总控制板、步进电机驱动和参数检测板、电机驱动板和电源板等。AUV设计有2套通信方案:无线方式和有线方式。图5~7分别为AUV机械外形、电控系统、浮力配置和湖试。

图5 AUV机械外形Fig.5 AUV mechanical system

图7 AUV浮力配置和湖试Fig.7 AUV buoyance configuration and lake trial
4 传感器选型
传感器可以分为平台传感器和海洋环境监测传感器。平台传感器是指AUV实现导航定位的必备传感器,如前视多波束声纳、DVL、GPS、数字罗盘、A HRS、LBL、高度计和声学Modem等。AUV在实现稳定可靠的自主导航之后便可以搭载不同的传感器完成相应的海洋探测任务,这些传感器包括海洋环境传感器:ADCP、CTD、ECO传感器、p H计、ORP等[4]。
受AUV体积的限制,本文所设计的AUV搭载的传感器列表见表1。

表1 传感器选型Table 1 The selection of senso rs
5 基于AHRS、数字罗盘和GPS的AUV自主
当前AUV自主导航方法主要有航位推算和惯性导航(INS)、声学导航和地球物理导航等。惯性导航系统通过将加速度对时间2次积分来获得潜器的位置,这种导航方法的优点是自主性和隐蔽性好。目前INS主要有2种形式:平台式和捷联式。捷联惯性导航系统(SINS)容易实现导航与控制的一体化,本AUV采用的是捷联惯性导航。姿态和航向参考系统A HRS是实现惯性导航的关键传感器,能够输出三维欧拉角、加速度和角速度[5]。
惯性导航方法的最主要问题是随着潜器航行时间的增大,其误差也不断增大。若AUV周期性地浮出水面,并采用GPS对其位置修正,潜器的导航精度将会得到很大的提高。这时潜器在相邻2次浮出水面之问的时间间隔取决于INS的精度。
此外,数字罗盘能够提供精确的欧拉角信息,可以对A HRS进行校对和修正,但是数字罗盘在地磁场突变的情况下会有较大误差,所以AHRS和数字罗盘互相依赖、相辅相成。
对于工作在非极区的捷联惯导,导航坐标系一般选用地理坐标系,设位置更新周期为Tl=tl-tl-1,n(l)和n(l-1)分别为tl时刻和tl-1时刻的导航坐标系,则
设Tl=M Tm,即经过M次速度更新后作1次位置更新,则Δ,经纬度和位置矩阵间存在如下关系:
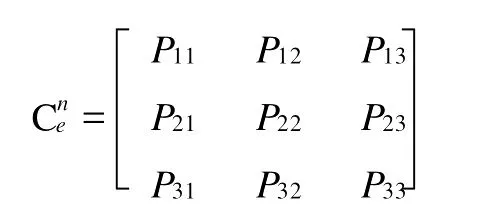
则L=arcsin P33
上述分析说明,只要确定出ΔRnm(m=1,2,…,M),就可以确定出AUV在t2时刻的位置矩阵,通过位置矩阵又可确定出经度和纬度。
AUV采用“浅水节点潜航”的方式进行自主导航,AUV潜航一定距离后浮出水面通过GPS定位,然后再入水潜航,以消除惯导系统的累计误差,见图8。

图8 AUV浅水节点潜航示意图Fig.8 AUV dives along nodes in shallow water
根据经纬度可以得到AUV的直角坐标,设Ji-1、Ji分别为AUV的2个节点,AUV即A点正在从Ji-1向Ji航行,根据A点(Ax,Ay)、Ji点(JiX,Jiy)的直角坐标可以计算AUV的航向角θ[6],见图9。

图9 航向角计算方法Fig.9 Method of calculating heading angle

从而得到AUV的航向角信息。实际实验中使用了恒定的航行速度(0.2 m/s)。
设计航向角采用PID控制方法,上述算法经过Simulink仿真也得到了很好的效果,假设海浪为正弦波,峰峰值0.3 m/s情况下,设计10个节点分别为(0,0)、(20,0)、(50,10)、(80,0)、(100,40)、(100,80)、(80,110)、(40,90)、(20,40)、(20,0),则仿真效果见图10。

图10 自主导航仿真效果图Fig.10 Autonomous navigation simulation results
其中外圈直线部分为各个节点之间的连线,内圈为AUV实际航行路线,可以看出在海浪恒定的情况下,AUV能够较好的完成自主导航。
实际情况中,海浪不是恒定的,所以在海浪模型上叠加了突发脉冲干扰,图11的Signal Builder即为各种不同类型的脉冲干扰,

图11 脉冲式海浪干扰仿真Fig.11 Pulse wave interface simulation
在此情况下,AUV自主导航的仿真效果见图12,
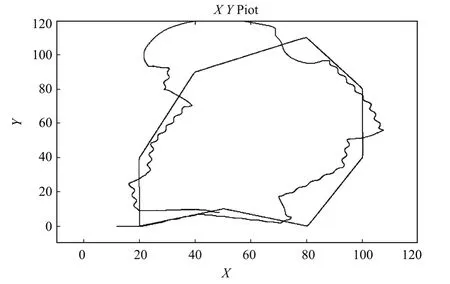
图12 脉冲式海浪干扰下自主导航仿真效果图Fig.12 Autonomous navigantion simulation with pulse wave interface
从仿真效果可以看出,AUV在海浪突然增大的情况下会产生较大的偏航,但是海浪恢复正常后会自行调整为正常航行状态。
根据前述设计方案和思路,在仿真取得成功后,于人工湖进行了真实环境实验。通过现场实验,对小型AUV的硬件系统、软件系统、运动控制算法进行测试和验证。人工湖水深2 m,同时波浪较小,AUV根据已知的GPS节点进行圆周自主导航。主要实现方法是由AUV与目标节点计算航向角,然后对A HRS所采集的实际航向角进行运动跟踪,实现期望运动,航向角跟踪曲线见图13。

图13 航向角跟踪曲线Fig.13 Tracking curve of heading angle
从实验结果可以看出基于A HRS、数字罗盘和GPS的AUV自主导航算法存在的问题和解决办法:
(1)AUV航行过程中要采用GPS进行校正,这样就限制了AUV向深水潜航,实际中采用了分段“节点潜航”的方法来获得GPS信息;
(2)航向角存在漂移现象。该问题的主要原因一个可能是由于所有微处理器对A HRS数据处理能力有限,二是数字罗盘的精度较低,三是实验场地磁场影响较大,使得地磁场不均匀,罗盘示数非线性所致,可以通过升级微处理器、传感器和根据现场校正罗盘来解决[7];
(3)直线往返时出发点和结束点之间存在偏差。该问题主要是由于跟踪节点的累计误差造成的,可以将节点门限值适当缩小,同时增大AUV推进功率,抵消波浪的影响。
6 结语
综上所述,该小型AUV的底层控制系统具有低成本、高可靠性和易于开发等优点,在此基础上能够依靠A HRS和数字罗盘等惯性传感器在水底进行自主导航,但是在长时间下存在积累误差,可以通过提高传感器的精度或者搭配基线导航传感器和GPS来进行矫正,通过采用组合导航方式可以提高AUV在水下的生存能力和可靠性。
[1] 蒋新松,封锡盛,王棣棠.水下机器人[M].沈阳:辽宁科学技术出版社,2000:304-311.
[2] 梁海浪.dsPIC数字信号控制器C程序开发及应用[M].北京:北京航空航天出版社,2006:1-36.
[3] 何波,韩盈盈,任红恩,等.用于水下有刷直流电机的无接触式测速装置[P].中国.CN200820225151.7,2009-09-02.
[4] Blidberg R.The development of autonomous underw ater vehicles(AUV):a brief summary[EB/OL].[2001-03-26],[2010-12-2],http:∥www.ausi.org.
[5] Stutters L,Liu H,Tiltman C,et al.Navigation technologies for autonomous underwater vehicles[J].Systems,Man,and Cybernetics,Part C:Applications and Review s,IEEE Transactionson,2008,38(4):581-589.
[6] He Bo,Yang Ke,Zhao Shuai,et al.Underwater simultaneous localization and mapping based on EKF and point features[C]China:ICMA(IEEE),2009.
[7] Han Yingying,He Bo,Sha Qixin.A distributed motion control system for the C-RANGER autonomous underwater vehicle[C].China:CAR(IEEE),2010.
[8] He Bo,Ren Hongen,Kan Wei.Design and simulation of behavior-based reactive decision-making control system for autonomous underwater vehicle[C].China:The 2nd IEEE International Conference on Advanced Computer Control(ICACC 2010),2010.
[9] He Bo,Li Bingsen.Design of behavior-based modular decisionmaking control system for autonomous underwater vehicle[C].China:Proceedings of the 6th international conference on Fuzzy systems and know ledge discovery(FSKD’09),2009:4845-4850.
[10] He Bo,Yu Nini.Robot-centered localization and map building for autonomous underwater vehicle[C].China:International Conference on Computational Intelligence and Natural Computing(CINC 2009),2009.
Design and Implementation of 20 Kilogram s Portable Autonomous Underwater Vehicle(AUV)
WANG Fen-Qing,HE Bo,ZHANG Hong-Jin
(College of Info rmation Science and Engineering,Ocean University of China,Qingdao 266100,China)
Portable AUV has the advantages of compact architecture,perfectmobility and low cost,this paper designs the low level control system and navigation system,and carriesout simulation and artificial lake experiment,the results verify that the low level control system is robust and based on A HRS,digital compass and GPS,AUV can realize autonomous navigation by means of node-submerge in shallow water.
portable AUV;low-level control system;inertial navigation system;AHRS
TP242.6
A
1672-5174(2011)7/8-183-06
山东省科技攻关项目(2008GG1005011);山东生博士基金项目(BS2009HZ006);青岛市科技计划项目(10-3-4-1-3-jch)资助
2010-12-27;
2011-03-25
王芬清(1985-),男,硕士生。E-mail:confi6@126.com
责任编辑 陈呈超
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
军民两用技术与产品(2021年7期)2021-10-13
舰船科学技术(2021年12期)2021-03-29
电子技术与软件工程(2021年23期)2021-03-08
湖北农机化(2020年4期)2020-07-24
中国惯性技术学报(2019年3期)2019-10-15
电子制作(2018年19期)2018-11-14
当代陕西(2018年12期)2018-08-04
作文·初中版(2017年2期)2017-03-06
中国惯性技术学报(2015年1期)2015-12-19
