5.8 GHz 电子不停车收费技术综述
2010-12-20 07:59陈俊杰山宝银
同济大学学报(自然科学版) 2010年11期
陈俊杰 ,山宝银
(1.东南大学仪器科学与工程学院, 江苏南京210096;2.东南大学 常州研究院, 江苏 常州213164)
电子不停车收费(electronic toll collection ,ETC)是国际上正在努力开发并推广普及的一种用于道路、大桥和隧道的电子收费技术.ETC 系统利用车辆自动识别技术完成车辆与收费站之间的无线数据通讯, 进行车辆自动识别和有关收费数据的交换, 从而实现不停车自动收费[1].
目前,ETC 系统主要采用远距离有源RFID(radio frequency identification)技术来实现车辆与收费站之间的无线数据通信.国际上ETC 系统使用的通信频段主要有3 种:915 MHz,2 .4 GHz,5 .8 GHz .其中915 MH z 和2 .4 GHz 频段在移动通信、医疗、科研等领域具有广泛应用,其频率争用严重,所以背景噪声较大,并且没有有效的安全机制,通信能力也较低,特别是2 .4 GHz 频段是全球免许可频段,其问题更为严重.从已经建成的应用系统来看,915 MHz 系统主要应用于北美地区.5 .8 GHz 专用通信系统主要应用于欧洲、亚洲及大洋洲地区.2 .4 GHz 系统应用相对较少,没有形成主流[2].而我国已有的ETC 系统应用中,3种通信频段并存.鉴于专用短程通信(dedicated shortrange communication,DSRC)协议标准发展趋势和国内ETC 系统应用现状,2007 年5 月实施的ETC &DSRC中国国家标准GB/T20851 —2007 以及2007 年10 月国家交通部颁布的《收费公路联网收费技术要求》[3],规定了我国ETC 系统的短程通信频段为5.8 GHz.
1 5 .8 GHz ETC系统构成及原理
1.1 5.8 GHz ETC系统构成
ETC 系统主要是利用车辆自动识别(AVI)技术, 通过路侧单元(road side unit,RS U)与车载单元(on board unit ,OBU)进行相互通信和信息交换, 以达到对车辆的自动识别, 并自动从该用户的专用账户中扣除通行费, 从而实现自动收费[4].系统构成如图1 所示,主要由前端系统和后台系统组成,前端系统包括车道控制系统、RSU 、OBU 及其他附属电子设施.
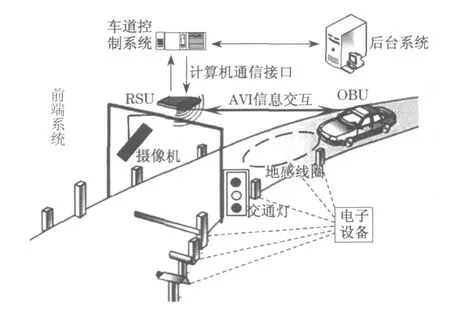
图1 5.8 GHzETC 系统构成Fig.1 Composition of 5.8 GHz ETC system
OBU(又称电子标签Tag)中存有车辆的识别信息,如车牌号、汽车ID 号,一般安装于车辆前面的挡风玻璃上.OBU 具备IC 卡访问接口, 可实现与IC卡的支付信息交互.
RS U 安装于收费站旁边.RSU 一直发送广播信号,当车辆通过收费站口时对RS U 广播信号做出响应,建立专用通信链路进行双向通信和数据交换.
车道控制系统通过RSU 实现AVI 信息验证、支付信息验证等数据交互, 并控制整个E TC 车道的电子设施,包括自动控制栏杆、车辆摄像系统、交通灯等.
后台系统有大型的数据库,存储大量注册车辆和用户信息.后台系统工作任务主要为向客户发售OBU ,并做OBU 的初始化,接收前台收费数据文件,交易和结算,存储、管理抓拍图像等.它主要包括如下系统:计算机管理系统,道路运营管理系统,结算中心管理系统,客户服务中心管理系统,银行管理系统.
1.2 5 .8 GHz ETC 系统原理
当车辆进入E TC 车道有效通信范围后,地感线圈首先感知车辆, 然后触发RSU 发出询问信号;OBU 监听到有效询问信号后被激活, 由休眠状态进入工作状态, 应答RSU 并实现A VI 信息交互;RSU通过AVI 信息交互获取车辆标识信息、用户电子账户信息及其他车辆属性信息, 并将数据传送到车道控制系统;车道控制系统对AVI 信息进行验证, 若AVI 验证通过则进行支付辅助信息验证, 计算支付额并传输支付记录, 典型ETC 交易示例如图2 所示.对于未通过AV I 验证的非法车辆, 车道控制系统会控制自动栏杆拒绝其通过,抓拍车辆图像传送给后台系统报警.整个E TC 通过前端系统和后台系统的配合,从而实现不停车收费管理.

图2 ETC 交易示例Fig .2 Trading examples of ETC
2 5 .8 GHz ETC系统关键技术
2.1 车辆自动识别技术(AVI)
车辆自动识别技术(A VI)是ETC 系统的核心技术,AVI 经历了声表面技术、条形码技术、红外通信技术[5]、无线电射频和微波通信技术等过程, 最后得到认可的只有改进的红外通信识别技术和无线电通信技术.到20 世纪末, 已基本确立了采用微波通信技术作为电子收费系统的车辆自动识别技术的主流地位.但近年来,采用全球卫星定位系统(GPS)技术的车辆定位系统(VPS)和基于光学字符识别(optical character recognition,OCR)技术的牌照识别(LPR)也进人了AVI 的应用.目前国际上的主流ETC 系统都采用微波通信技术实现车辆自动识别.
同时, 国际上为了实现智能交通系统(intelligent transport system,ITS )对车辆的智能化、实时、动态管理, 专门开发了短距离间的专用短程通信(DS RC )协议.目前, 国际上己形成欧洲CEN/ TC278 、美 国ASTM/IEEE 、日本ISO/ TC204为核心的DSRC 标准化体系, 其他各国的DS RC 标准都是参照这3 类标准来制定的.表1 对国际DSRC标准做了简单的比较.

表1 国际DSRC 标准比较Tab.1 Compar ison of international DSRC standards
5 .8 GHz ETC 系统中, OBU 与RSU 基于DS RC 协议在5 .8 GH z 频段建立通信链路完成数据交互[6],实现车辆识别, 如图3 所示.

图3 OBU 与RSU 通信链路Fig .3 Communication link between OBU and RSU
2.2 车型自动分类(AVC)技术
公路收费是分车型收费的, 不同的车型对应着不同的收费标准, AVC 系统根据车辆的物理特性来进行车型分类.AVC 依据的车辆物理特性包括:车长,车宽,车高,车轮直径, 轮距,轮数,轴数, 轴距, 底盘高度及外形尺寸等.
2.2.1 车辆特征检测方法
目前,国内外用于车辆特征检测的传感器主要有压力传感器、环形地感应线圈、红外阵列、超声波、雷达、声学传感器、震动传感器和视频传感器.本文对其中运用传感器的比较重要的几种检测方法进行了阐述和分析.
(1)电磁感应线圈法.其方法是首先要在地面埋设专用的感应线圈,此线圈作为检测器与主机相连.当车辆通过车道时, 主机就可以根据检测线圈送来的信号对车辆进行分类.电磁感应线圈法的原理为,根据不同车辆通过埋设于车道下的环形感应线圈引起其电感量不同的变化来检测车辆的到达和离开,并进行车型分类.系统的关键部分为线圈探测器, 它由感应线圈和控制部分组成.当没有车辆通过时, 振荡器的频率为f1,当有车辆以一定速度接近并从其上通过时,线圈的电感参数发生变化, 进而引起振荡器的振荡频率发生微弱变化.假定有车辆通过时振荡器频率为f2,由于不同车型的车辆底盘形状是不同的,因此f2将随着车型的变化而发生变化, 当车辆离开环形线圈后,振荡器的频率又将恢复到f1.因此可以得到随汽车通行时刻变化而变化的频差的变化曲线.不同车型的车辆由于底盘的形状、大小、高低不同, 导致其对线圈的影响也不同, 也即导致振荡器频差曲线的不同.这样就可以反过来通过频差曲线的不同来判别车辆的类型[7-8].
电磁感应线圈法的优点是技术比较成熟、成本低、方法简单易行,只需检测埋在地下的感应线圈,再与已知频差曲线对照即可得出分类结果.其缺点是系统的安装和维护极其不便,同时受车辆行驶速度和其他干扰因素等影响, 获得的频差曲线干扰较多, 曲线复杂,对车型的分类效果不理想.所以很少单独使用,通常作为其他系统的辅助装置.
(2)激光为代表的检测法(雷达、超声波及红外线).采用脉冲激光的测量方式可以检测行驶中车辆的3 维外形形状.激光检测系统在每个车道安装6个激光检测器,按车辆行驶方向设置成前后两排, 排间距为30 cm,每排3 个光束, 中间光束垂直向下, 左边的左倾12°, 右边的右倾12°, 前排为3 个加宽光束, 通过一个10°光孔模投射在路上, 产生一个横向330 cm 连续测量线,3 段110 cm 的测量线之间的纵向间距不超过0 .5 cm ;后排为3 个窄光束,分别产生10 cm ×0 .5 cm 的测量区域.由于激光投射到路面并反射回激光传感器的时间是固定的, 因而可通过反射光间距发生变化的时间, 精确地测量出车辆的高度信息;另一方面, 选用道路的反射强度作为参考值, 通过检测反射能量的变化即可测出车辆是否存在, 如果脉冲激光频率为10 kH z,也就是说每秒中可记录10 000 个变化的车辆高度信息,利用高度变化信息的10 %, 就可测出速度为250 km ·h-1的车辆每隔6 .9 cm 的车高轮廓图,对于慢速行驶车辆,可获得车高轮廓的详细信息;利用车辆从一排光束到另一排光束所花时间就可以计算出车辆长度, 因为宽光束部分会投射到路上,部分会投射到车辆上,这样测量的车高要小于实际高度,这个高度与窄光束测得的准确车辆高度的比例反映了车辆宽度信息,可据此测量出车辆每一断面的宽度.由每一断面宽度、高度和车长信息就获得了高精度车辆3 维外形图像[7-8].
激光检测法的优点是系统的测量精度比较高,而且可以测出行驶中车辆的外形3 维全貌.缺点是安装及维护要求较高, 外形检测后还需要与数据库中的数据进行匹配, 系统比较繁琐, 而且激光, 包括超声波、雷达传感器在使用时造成环境污染.为了控制污染, 这些传感器的功率受到严格限制而影响检测距离和检测效果.
(3)动态称重法.其原理是, 当车辆通过埋入路面下的压力检测器时, 检测器受力产生形变,根据回传信息对车辆进行检测, 可测量车辆的轴重、轴距、总重、车速等,并按预先制定的车型分类表, 自动识别车型[7].动态称重具有节省时间、效率高的优点,但由于其技术还不够成熟, 加之设备安装复杂、寿命短,温度、车辆振动、道路质量等都会对系统精度产生很大影响, 所以在车辆检测和车型识别中还没有得到广泛应用.
(4)视频、图像法.视频法首先依靠安装在检测区域后上方的高速摄像机对检测区域内的车辆进行拍摄,然后研究摄像机摄取的车辆的视频图像, 利用图像处理方法对其进行分析处理,从而确定车辆类型.视频法的优点是可以获得车辆外形全貌的参数,而且精度比较高.基于该方法的车型识别系统, 具有维护方便,不影响交通的优点, 视频图像输出可提供现场录像, 为有争议的车型识别提供证据及人工判别依据.一台摄像机可以同时监控多个车道,节约系统成本.缺点是受外界环境(如恶劣天气情况)的影响较大,图像处理技术比较复杂,成本较高.
2.2.2 车型识别算法
利用各种传感器得到车辆特征参数后, 就要对数据进行分析、融合来确定车型.目前, 关于车型识别的算法大致可以分为以下2 类:
(1)基于模板的方法.Jolly M等[9]通过模板匹配法对车型进行分类, 其模板是融入先验知识的在一定范围变形的多边形, 用Bayes 决策判定车型.该算法的缺点是复杂、计算量大, 车型识别准确率最高可达91 .9 %.Wei 等[10]使用了相对简化的模型, 即构造了参数化模型表示不同的车型, 这些参数包括车辆的至高点、拓扑结构等, 然后应用神经网络进行识别,车型识别率达到90 %以上.
(2)基于代数特征的方法.将一幅车辆样本图像看成一个矩阵, 通过对矩阵进行变换或线性投影,可以抽取车辆的代数特征.魏小鹏等[11]将人脸识别中的奇异值方法应用于车型识别,但与人脸识别不同的是, 车辆样本图像均采集于室外, 图像的灰度变化比较大.Lim T R 等[12]应用Gabor 滤波器对车辆样本图像抽取Gabor 特征, 由于Gabor 滤波器强大的分类鉴别能力, 车型识别效果较好, 识别率达到95 %以上.
近年来, 各种基于支持向量机(support vector machines, SVM)的车型识别算法研究引起了广泛的关注.支持向量机是由Vapnik 等人于1995 年提出的一类新型机器学习方法.能够较好解决小样本、非线性及高维数等模式识别问题.在车型识别中, 陈宏等[13] 应用SVM进行车型识别, 分类正确率达到了90 %.SVM的理论优势非常突出, 但应用研究还相对滞后.
2.3 视频稽查技术
视频稽查是利用OC R 技术自动获取非法车辆的车牌号码, 车牌照识别主要分为车牌图像捕获、图像预处理、车牌定位、字符分割、字符识别等几个部分.
2.3 .1 车牌定位
车牌定位的研究国外起步比较早,上世纪90 年代以来, 由于交通现代化发展的需要, 我国也开始对车牌定位进行深入研究,并取得了一定成效.目前基本的车牌定位方法主要有:①基于纹理的定位方法;②基于边缘检测的定位方法;③基于数学形态学的定位方法[14];④基于颜色的定位方法[15];⑤基于遗传算法提取汽车牌照的方法[16];⑥基于BP 神经网络的车牌定位方法[16].上述各种车牌定位方法都具有一定的实用性和参考价值,但大都不完善,背景要求比较简单, 不能满足当今背景复杂、车牌多、干扰多的实际场合应用要求.结合上面这些基本方法与各种优化算法又派生出许多其他定位算法, 每种方法也存在各自不同的局限性.
2.3 .2 字符分割
在经过号牌定位环节后, 为了方便下面的识别环节,应首先对字符进行分割,并进行量纲一化, 分割质量的好坏和正确与否将直接影响后面识别结论是否正确.字符分割的主要任务是:①确定车牌字符的上下边界;②将车牌中的字符逐个分割出来;③将分割出来的字符量纲一化到一个固定的大小.当然不同的识别算法,在这个阶段有不同的算法和目标, 但大致目标是基本相同的.目前字符分割方法主要有:①直接的分割算法, 这种方法是基于车牌字符的先验知识,直接对字符进行切分,局限性是对车牌精确定位要求较高,鲁棒性不好;②基于模板匹配的算法[17],该算法充分利用了车牌字符等宽、排列规则的特征,根据车牌的字符排列规则,引入适当模板, 并使用模板与垂直积分投影曲线匹配,计算最佳匹配位置,从而得到字符分割的准确结果,局限性是对同一车牌,不同字符的字符宽度不同,切分效果不好;③垂直投影法[17] ,采用对二值车牌进行垂直投影, 从而确定车牌中字符的位置,这种方法对车牌图像无噪声、字符不出现黏连的情况比较适合,但是如果条件改变,那么提取的字符就会出现缺损等不良现象.
2.3.3 字符识别
字符识别是模式识别的重要应用领域, 涉及到图像处理、人工智能、模糊数学、机器视觉等多种学科,是一门综合性很强的应用型技术.当前专门针对车牌字符识别的方法主要有简单的模板匹配法、神经网络方法、特征点匹配法、基于Hausdorff 距离法、光电混合联合变换相关法和小波法, 等.简单的模板匹配法计算快速, 但对字符的噪声、变形以及光照的影响容易敏感.常用的神经网络有BP 神经网络、Hop fied 网络和Kohonen 网络等, 其优点是对于字符的噪声及变形不敏感, 缺点是不易区分特征值相近的字符, 因此神经网络法常用于初级分类.刘维一等[18]在简单模板匹配法的基础上,根据汽车牌照本身的特性, 提出了特征点匹配识别的方法.特征点匹配法选取了能够区分各字符的若干特征点, 进而取值得到各字符的编码, 从而能较好地区分特征值相近的字符.但是该方法只适用于二值化图像, 因此受二值化质量影响很大.葛宝臻等[19]提出的光电混合联合变换相关方法是利用联合变换相关器(JTC)根据输出面上相关峰的位置确定目标图像和参考图像,但速度较慢,离实时处理还有一段距离.以上的这些字符识别方法各具优点,但仍有不足之处, 所以目前还没有一种单纯的识别方法能很好解决车牌字符识别问题, 只能组合多种识别方法来设计车牌字符多级分类器.曹刚[20]提出了一种包含特征点匹配和小波隐形马尔科夫链(W HMCM)匹配的多级车牌字符识别方法, 该方法对字母、数字的识别率达99 .1 %, 对汉字的识别率达96 .4 %.
3 5 .8 GHz ETC系统中的电子标签和读写器
3.1 5.8 GHz ETC电子标签
ETC 系统中的电子标签, 即车载单元(OBU),是具有微波通信功能和信息存储功能的移动设备识别装置.ETC 系统中的OBU 按其采用的技术可分为主动式和被动式两类.主动式为有源发射方式, 自身具备发射能力, 需接车内电源或电池;被动式是无源反向散射方式, 无须接电源.OBU 按照读写方式还可分为只读型和可读写型[21].根据有无IC 卡接口又分为单片式和双片式, 即:带IC 卡接口的为双片式, 无IC 卡接口的为单片式.国家交通部颁布的《收费公路联网收费技术要求》规定我国5 .8 GH z ETC系统采用的OBU 为主动式、可读写、双片式电子标签, OBU 设备需要满足以下技术要求:
(1)无线通信链路.OBU 与RSU 之间的DSRC应符合5 .8 GH z DSRC 规定;OBU 的发射机应能够工作在非调制状态, 即载波状态;OBU 的发射机应能够工作在连续发射周期为511 bit 的伪随机二进制系列(PN9)的状态;OBU 的发射机应能够工作在连续发射全“0” 的状态.
(2)安全要求.OBU 应支持TDES 算法的数据存取和访问控制;所有初始化数据的写入应采用TDES 加密方式传输;OBU 要具备IC 卡读写接口,该接口需符合ISO/IEC 7816 或ISO/IEC 14443 TYPE-A 标准的相关规定, 接触式接口的通信速率不低于56 bit ·s-1.
(3)环境条件.工作温度范围为-25~+70 ℃(寒区-40~+70 ℃;存 储温度范围为-40~ +70℃;相对工作湿度为5 %~100 %;静电为8 kV ;振动应符合GB/T 2423 .13 ;冲击应符合GB/T 2423 .6 试验Eb和导则.
(4)其他技术要求.OBU 应具备防拆卸功能, 一旦被拆卸,应在OBU 内的相应信息存储区中设置相应的标志位;平均无故障时间应大于50 000 h, 平均免维护时间不小于2 年;支持应用更新, 更新可采用DSRC 方式或有线方式.
OBU 从功能上可划分为:收发天线、射频信号收发单元、调制解调单元、帧处理单元、MCU协议处理单元、IC卡接口单元、电源管理模块及外部扩展应用接口.如图4 所示.OBU 的硬件设计中,5 .8 GHz 射频收发单元最为复杂,目前国内外还没有任何公司量产符合国家标准GB/T20851 —2007 规定的DSRC 物理层通信协议的5 .8 GHz 单片收发IC.美国微芯(RFMD)公司2009 年发布了一款针对我国ETC 系统的5 .8 GHz 芯片,但是只具有发送功能.我国目前ETC 系统采用的5 .8 GHz 车载电子标签大部分都是直接引进的国外产品,主要来自于欧洲和日本, 如:挪威Q-Free 公司、日本电装公司、瑞典康比特公司、日本丰田公司.国内提供5 .8 GHz 电子标签的主要有:广州埃特斯公司、广东新粤公司.但是, 由于这些公司起步较早,其生产的5 .8 GHz 电子标签在技术上并不完全符合国家标准GB/T20851 —2007 中的规定.

图4 OBU 功能结构Fig.4 Fun ction structure of OBU
3.2 5 .8 GHz ETC 系统中的读写器
E TC 系统中RS U 安装于收费站旁边.当车辆通过收费站口时车载单元与RS U 之间建立专用通信链路进行双向通信和数据交换.《收费公路联网收费技术要求》规定我国5 .8 GH z ETC 系统采用的RS U 设备需要满足以下技术要求:
(1)无线通信链路.RSU 与OBU 之间的DSRC应符合5 .8 GHz DSRC 规定;RSU 的收发天线应具有同轴射频接口;RSU 的发射机应能够工作在非调制状态,即载波状态;RSU 的发射机应能够工作在连续发射周期为511 bit 的伪随机二进制系列(PN9)的状态;RSU 的发射机应能够工作在连续发射全“0” 的状态.
(2)接口.RSU 应至少具备RS232,RS485 ,USB 或以太网方式之一的上位机通信接口;RS U 应具备符合ISO/IEC 7816 要求的PSAM卡座接口,支持符合JR/T 0025 .1~10《中国金融集成电路(IC)卡规范》安全交易规范要求的PASM的透明指令操作,PASM卡通信速率不低于56 kbit ·s-1.
(3)环境条件.工作温度范围为-20~+55 ℃(寒区-325~ +40 ℃);存储温度范围为-40~ +85 ℃;相对工作湿度为5 %~100 %;静电为8 kV ;振动应符合GB/T 2423 .13 ;冲击应符合GB/T 2423 .6试验Eb 和导则;盐雾应符合GB/T 2423 .18 ;抗4 kV 10/200 μs 雷击.
随着我国ETC 标准的完善, 打破了少数厂商垄断ETC 设备的局面,符合统一标准的各厂商ETC 产品将相互兼容,国内的中兴通讯、握奇等公司也在开始研发符合国家标准的OBU和RSU 设备.
4 5 .8 GHz ETC发展趋势
目前,欧洲和日本的E TC 系统都是5 .8 GH z 频段;北美虽然现有的是915 MH z 频段, 但新建的ETC 系统都是5 .8 GH z 频段.我国交通部规定的ETC 频段也是5 .8 GHz .从国内外的情况可见, 5 .8 GH z ETC 将成为ETC 的主流.
根据国内外ETC 建设经验, 规范、统一的标准平台是E TC 普及的关键, 而目前国际上基于5 .8 GH z 的DSRC 协议存在着互不兼容的几大标准体系, 国内目前投入使用的ETC 系统也互不兼容.统一完善5 .8 GH z E TC 的DSRC 协议以及相关技术标准, 可以推进高速公路联网收费系统建设, 会使ETC 设备具有通用性, 各厂商的ETC 产品相互兼容, 促进不停车收费技术的发展.
5 .8 GH z ETC 系统中电子标签将以双片组合式为研究重点, 这种标签的优点有:对驾驶员收费,而不是对车辆收费;IC 卡随身携带,安全性高;增加了对用户的服务;体现一卡多用的特征.根据我国ETC现状,采用“双片式电子标签+双界面CPU 卡” 的技术模式,可以实现与现有半自动收费系统的兼容.
车辆识别、车型分类是ETC 的重要组成部分,使用单一的车辆识别、分类方法在精确性、安全性方面难以满足要求, 基于信息融合的多种方法组合识别将成为车辆识别的研究重点,尤其随着计算机图像技术的发展, 以视频图像识别为主, 红外、感应线圈技术等为辅的组合车辆识别、分类系统将大幅提高车辆识别效率.
5 结语
随着经济的发展和我国高速公路里程的快速增加,电子不停车收费系统的应用将会逐渐普及.本文对5 .8 GHz 电子不停车收费系统的构成、原理、关键技术以及发展趋势给出了系统综述.目前我国已投入使用的ETC 系统仍然存在许多问题,如:车辆通行速度较慢、前后车辆识别误差、邻近车道干扰[22]等, ETC技术还需要进一步深入的研究和不断的完善.
[1] X iao Z H,Guan Z Q,Zheng Z H .T he research and development of the highway ' s electronic toll collection system[C] ∥Proceedings of the 1st International Wo rk shop on Know ledge Discovery and Data Mining.New York:IEEE Com puter Society ,2007:359-362.
[2] Nowacki G,Mitraszew ska I,Kaminski T . Worldwide applications in electronic toll collection sy stems [C] ∥Proceedings of International Conference on Modeling of Business, Industrial and Transport System s.Riga :Transpo rt& Telecommunication Inst,2008:269-277.
[3] 交通部公路科学研究院, 北京交科公路勘察设计研究院.收费公路联网收费技术要求[M] .北京:人民交通出版社, 2007.Research Insititute of Highway of the Ministry of Transpo rt,RIOH Transport C onsultants.Technical requirements of highway toll collection[M] .Beijing :China Communications Press, 2007.
[4] Ren Z G ,Gao Y B .Design of electronic toll collection system in expressway based on RFID[C] ∥Proceedings of International Conference on Environmental Science and Information App lication Technology (ESIAT 2009).New York:IEEE Com puter Society ,2009:779-782.
[5] Shieh W Y, Wang T H,Chou Y H,et al.Design of the radiation pattern of in frared short-range communication system s for electronic-toll-collection applications[J] .IEEE Transactions on Intelligent Transportation System s, 2008, 9(3):548.
[6] Shieh W Y,Lee W H,Tung S L,et al.Analy sis of the optimum configu ration of roadside units and onboard units in dedicated short-range communication systems [J] .IEEE Transactions on Intelligent Transportation System s, 2006, 7(4):565.
[7] 王涛.基于人工神经网络的自动车型分类研究[D] .北京:北京交通大学机械与电子控制工程学院, 2006.WANG Tao .Study of automatic vehicle classification based on artificial neu ral network [D] .Beijing :Beijing Jiaotong University .School of Mechanical, Electronic and Control Engineering2006.
[8] Ferreira P M, Marques G,Jorge P M, et al.Automatic vehicle detection and classification [C] ∥Proceedings of 11th International IEEE Conference on Intelligent Transportation Sy stem s.New York:IEEE,2008:501.
[9] Jolly MP D, Lakshmanan S, Jain A K .Vehicle segmentation and classification using deformable templates [J] .IEEE Transactions on Pattern Analysis and Machine Intelligence,1996, 18(3):293.
[10] WEI W, ZH ANG Q S,WANG MJ.Amethod of vehicle classification using models and neu ral networks [C] ∥Proceedings of IEEE 53rdConference on Vehicular Technology .New York:IEEE,2001:3022-3026.
[11] 魏小鹏, 于万金, 金一粟.奇异值方法用于汽车车型识别[J] .中国图形图像学报, 2003, 8(1):47.WEI Xiaopeng,YU Wanjin, JIN Y isu.Car shape recognition based on matrix singu lar value[J] .Journal of Image and Graphics, 2003, 8(1):47.
[12] Thiang,Lim R, Guntoro A T .Car recognition using gabor filter feature extraction[C] ∥Proceedings of Asia-Pacific Conference on Circuits and Systems (APCCAS' 02).New York:IEEE ,2002:451.
[13] 陈宏, 何小海, 吴炜, 等.应用SVM的三维车型识别技术[J] .四川大学学报:自然科学版, 2006, 43(6):1279.CH EN Hong,H EXiaohai, WU Wei, et al.Three-dimensional characters recognition for vehicle type identification using SVM[J] .Journal of Sichuan University :Natu ral Science Edition, 2006, 43(6):1279.
[14] 李刚, 曾锐利, 林凌, 等.基于数学形态学的车牌定位算法[J] .仪器仪表学报, 2007, 28(7):1323.LI Gang,ZENG Ruili, LIN Ling,et al.Car license plate location algorithm based on mathematical morphology[J] .Chinese Journal of Scientific Instrument,2007, 28(7):1323.
[15] 王洪建.基于HSV 颜色空间的一种车牌定位和分割方法[J] .仪器仪表学报, 2005, 26(8):371.WANG H ongjian.Approach for locating and segmenting vehicle license plates based on HSV color space[J] .Chinese Journal of Scientific Instrument, 2005, 26(8):371.
[16] LI G,ZE N R L, LIN L .Research on vehicle license plate location based on neural network s[C] ∥Proceedings of IEEE First International Conference on Innovative Computing ,Information and C ontrol .New York :IEEE,2006:174-177.
[17] Yanamura Y, Goto M, Nishiyama D,et al.Extraction and tracking of the license plate using Hough transformand voted block matching [C] ∥Proceedings of IEEE IV 2003 Intelligent Vehic les Symposium . New York: IEEE ,2003:243.
[18] 刘维一, 盛益强, 乔辉, 等.特征点匹配法实现汽车牌照的快速识别[J] .光电子· 激光, 2002, 12(3):274.LIU Weiyi, SHENG Yiqiang,QIAO Hui, et al.Characteristic dot matching method of realizing rapidly recognition of the number plate[J] .Journal of Optoelectronics Laser ,2002,12(3):274.
[19] 葛宝臻, 陈希明,张以漠.基于光电混合联合变换相关的汽车牌照识别方法的实验研究[J] .光电子·激光, 1999, 6(10):248.GE Baozhen, CHEN Ximing, ZHANG Yimo.Research on number plate recognition by a hybrid joint transform correlator[J] .Journal of Optoelectronics Laser, 1999, 6(10):248.
[20] 曹刚.运动车辆识别技术研究[D] .四川:四川大学计算机学院, 2004.CAO Gang .T he research for recognition of moving vehicle[D] . Chengdu: Sichuan University . School of Compu ter,2004.
[21] Cai C Q,Du B,Yu W J.The design of the E TC com munication equipment based on the DSRC technology[C] ∥Proceedings of the 3rd International C onferen ce on Computer Science and Edu cation(ICCSE 2008).Xiamen:Xiamen University Press,2008:317-322.
[22] Kurihara H,Hirai Y,Takizaw a K,et al .An improvement of com munication environment for E TC system by using transparent EM wave absorber[J] .IE ICE Transactions on Electronics, 2005, 88(12):2350.
猜你喜欢
法律方法(2021年4期)2021-03-16
小学生学习指导(低年级)(2019年12期)2019-12-04
电子制作(2019年19期)2019-11-23
电脑爱好者(2019年8期)2019-10-30
中国交通信息化(2019年7期)2019-10-08
电子制作(2019年12期)2019-07-16
数字通信世界(2019年3期)2019-04-19
中国公路(2017年10期)2017-07-21
中国交通信息化(2017年3期)2017-06-08
小猕猴智力画刊(2017年5期)2017-05-25