一种高稳定度太阳帆板驱动机构控制方法
2010-12-11 01:31祝晓丽陆娇娣耿远迎王友平
空间控制技术与应用 2010年4期
张 猛,祝晓丽,陆娇娣,耿远迎,王友平
(北京控制工程研究所,北京 100190)
一种高稳定度太阳帆板驱动机构控制方法
张 猛,祝晓丽,陆娇娣,耿远迎,王友平
(北京控制工程研究所,北京 100190)
为了提高低轨遥感平台卫星用太阳帆板驱动机构(SADM,solar array drive mechanism)的速率稳定度,降低太阳帆板转动对星体姿态稳定度的影响,在对SADM驱动原理分析和驱动性能测试的基础上,明确了步进电机定位力矩对速率稳定度的影响,并提出了定位力矩补偿方法.在SADM转速和转矩测量平台上,对定位力矩补偿的驱动控制效果进行了测试和对比分析,测试结果表明,采用定位力矩补偿控制方法可以将SADM的速率稳定度提高约一倍.
SADM;步进电机;定位力矩;补偿;速率稳定度
为满足空间飞行器在轨能源供应的需要,大多数三轴稳定飞行器采用帆板式太阳电池阵并使用太阳帆板驱动机构(SADM,solar array drive mechanism)使电池阵对日定向,以便尽可能多的获取能源,同时通过太阳帆板驱动机构传输信号并向飞行器本体内部传输能源.太阳帆板驱动机构通常采用步进电机作为驱动源,步进电机具有定位精度高、无累积误差和易于开环控制等优点.
从驱动传动结构上分类,太阳帆板驱动机构包括直接驱动型太阳帆板驱动机构和带减速器的间接驱动型太阳帆板驱动机构.德国TELDIX GmbH公司、法国CNES公司及SEP公司、德法EADS Astrium公司和北京控制工程研究所均有直接驱动型SADM产品应用于地球静止轨道或太阳同步轨道卫星.直接驱动型SADM通常采用超小步距角的步进电机驱动,为了获得更高的稳定度,通常采取步进细分控制.由于没有减速部件,直接驱动型SADM具有非常高的转动寿命,但受限于步进电机的性能,驱动力矩不大.应用更为广泛的是间接驱动型SADM,国际上各主要SADM生产商均有间接驱动型SADM产品,谐波减速器和直齿轮减速器是普遍应用的两种减速器,步进电机整步距控制和微步细分控制均有应用.间接驱动型SADM可以获得更小的步距角、更高的驱动力矩,适应各种卫星平台的使用需求.由于减速器的存在,SADM转动寿命和可靠性受减速器性能影响[1-4].
步进电机通常具有较大的定位力矩,以提供机构不通电时的保持力矩.但对于采用微步细分驱动的SADM产品,定位力矩的存在会造成电机输出轴步距角的周期性变化,表现在转速上为转速的周期性波动.随着有效载荷精度的提高,卫星平台控制稳定度指标已经要求优于1×10-4(°)/s.而SADM驱动太阳帆板的转动是卫星Y轴最大的扰动量,SADM驱动的稳定性直接关系整星平台的稳定度.对于直接驱动型SADM,步进电机的定位力矩特性直接影响驱动速率稳定度.研制高性能低定位力矩步进电机和从电机控制角度减小定位力矩是两种有效途径[3-6].
本文对应用于低轨遥感平台的步进电机直接驱动型SADM产品的驱动稳定度进行了详细地分析和测试,分析了步进电机定位力矩特性,提出了采用电流补偿的方法减小定位力矩影响,提高SADM的驱动速率稳定度.在SADM转速和转矩测量平台上对定位力矩补偿前后的SADM驱动速率稳定度进行了测试,试验结果表明采用定位力矩补偿方法可以将SADM速率稳定度提高约一倍.
1 步进电机定位力矩分析
直接驱动型SADM无减速机构,步进电机输出力矩直接作用在SADM轴系,步进电机自身所具有的定位力矩和驱动电路供电产生的电磁力矩波动都会直接作用在SADM转轴.为了减小SADM输出轴的步距角并提高SADM的速率稳定度,采用微步细分控制驱动步进电机.
1.1步进电机模型
不考虑电机绕组磁滞、磁饱和,忽略电机绕组的互感等非理想因素,两相混合式步进电机简化模型包括如下电压方程、力矩方程和机械运动方程[4-5]:
Te=Ta+Tb+TD

式中:ua、ub和ia、ib分别为电机AA′相和BB′相绕组的电压和电流;R为相绕组电阻;L为相绕组自感;K为电机电磁力矩系数;N为电机转子齿数;θ、ω分别为电机转子转角和转速(即帆板转角和转速);D为定位力矩幅值;Jm为电机转轴转动惯量(连接帆板时为SADM转轴和帆板转动惯量之和);TL为电机轴上负载力矩,包括摩擦力矩和干扰力矩.
力矩方程中,Ta、Tb分别为电机AA′相和BB′相绕组相电流产生的电磁力矩,TD为步进电机定位力矩,该力矩与永磁同步电机的齿槽定位力矩类似,并与绕组电流大小无关.
1.2步进电机转矩分析[7-8]
两相混合式步进电机中,每相绕组独立控制,按照特定的换向顺序同时驱动两相绕组使步进电机按照顺时针或者逆时针方向转动.图1所示为两相步进电机结构示意图.表1中“+”表示电流流入方向,“-”表示电流流出方向.

图1 两相步进电机结构示意图

表1 两相步进电机换向顺序表


图2 步进电机转矩与转子位置关系
如图2所示,在区域1内,45/N(°)为由AA′和BB′两相产生的电磁力矩和定位力矩的合成力矩的平衡点.在区域2内,AA′相绕组和BB′相绕组产生的电磁转力矩为负值,根据图1所示换相顺序,绕组AA′电流方向为从A′流向A,则图2中所示的AA′相电磁力矩为正值,此时,在区域2内AA′相和BB′相产生的电磁力矩和定位力矩的合成力矩平衡点为135/N(°).依次类推,当如图3所示的步进电机正向转动时,可以获得平衡位置附近作用于电机转子的电磁力矩和定位力矩的合成力矩波形,即电机的实际输出力矩.当采用双四拍工作方式时,在平衡点的电磁力矩和定位力矩符号相反,使得在平衡点实际作用于转子的力矩波形平缓,可能造成平衡时位置误差变大.由于双四拍工作方式的平衡位置与电机不通电时的平衡位置不同,在绕组不通电时,由于定位力矩的作用,步进电机将顺时针或逆时针转动约45/N(°).
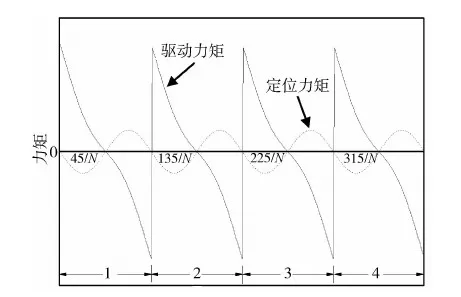
图3 正向转动时平衡位置附近的电机驱动力矩和定位力矩
1.3微步细分控制转矩分析
步进电机采用整步距驱动方式工作时在特定频率和负载条件下存在振荡现象,并且由于电机结构的影响,步距角受到一定的限制.为了获得更小的步距角并抑制电机的振荡,通常采用微步细分控制驱动两相混合式步进电机.步进电机两相绕组分别通以具有如下相位关系的正弦电流:
其中:Im为绕组电流幅值;α为两相绕组电流的电角度.步进电机输出转矩如下:

微步细分控制过程中,按照式(6)控制两相绕组电流为正弦时,由于定位力矩的作用,当步进电机转动时步进电机实际输出转矩存在与定位力矩频率一致的4次谐波.实际驱动过程中转子转动角度并不均匀,如图4所示.转子角度变化的不均匀直接造成转速的波动,降低了SADM的速率稳定度.
2 定位力矩补偿方法
针对定位力矩周期性变化和大小与电机绕组电流无关的特性,提出在绕组参考电流波形上叠加定位力矩补偿电流的方法减小或消除定位力矩的影响.定义两相绕组参考电流波形如下:
将式(8)代入式(3)得
令式(9)右侧后两项为0,可得

实际控制过程中,由于采用开环控制,不测量转子角位置θ,因此,无法直接获得式(11)所示的参考电流波形.分析并测量遥感平台SADM实际工作工况,理想情况下,SADM工作过程中,驱动力矩与阻力矩相等,如果阻力矩保持恒定,则两相绕组参考电流表达式中的α与Nθ的差值保持恒定,在知道α与Nθ的差值的条件下,就可以确定参考电流波形.SADM空载和带实际帆板工作时,阻力矩只存在于SADM内部,该阻力矩由轴承摩擦力矩、滑环摩擦力矩等组成.SADM以巡航速度转动时的速度波动约为标称速度的15%左右,考虑到SADM输出轴自身转动很慢,SADM的摩擦阻力矩变化很小,因此,可以在对阻力矩进行估算的基础上确定α与Nθ的关系,并确定两相绕组参考电流波形.
3 试验结果
3.1SADM转速和转矩测量平台
SADM转速和转矩测量平台如图5所示.在该平台中,利用高精度光栅测量SADM输出轴转角,利用转矩传感器测量SADM输出力矩,磁粉制动器实现在输出轴上施加阻力矩负载.该平台测角精度为0.41″,转矩测量精度为20mN·m,最大转矩测量范围为10N·m,转角采样频率高达100kHz.

图5 SADM转速和转矩测量平台
3.2试验结果
遥感平台SADM步进电机定位力矩约为单相绕组驱动力矩的4%,即k=0.04,SADM以巡航和应急模式运行时,α与Nθ差值约为36°.
在SADM转速和转矩测量平台上对定位力矩补偿前后的SADM输出轴转速进行了测量,测试条件:负载力矩为零,SADM输出轴不带惯性负载.图6为定位力矩补偿前后SADM转速对比结果,标称转速为0.0715(°)/s.图中周期性转速尖峰由绕组电流换向造成.定位力矩补偿后,由定位力矩造成的SADM输出轴转速波动明显减小.
图7为定位力矩补偿前后转速谐波对比结果.定位力矩补偿后,与定位力矩相关的4次谐波幅值显著减小.
采用300ms采样周期对SADM输出轴转角变化进行了测量,按照式(12)计算了速率稳定度
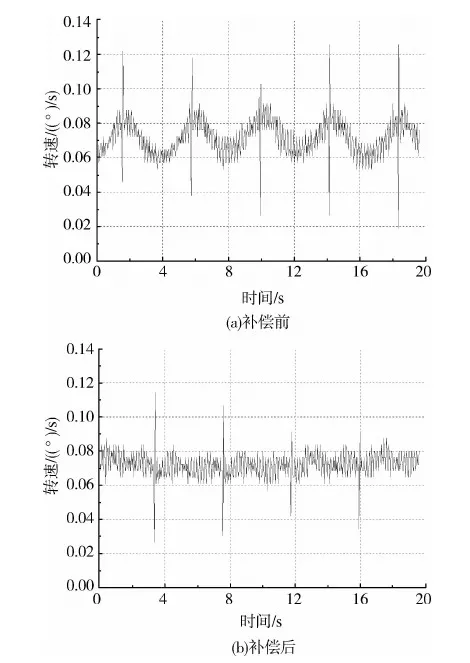
图6 定位力矩补偿前后SADM转速对比结果
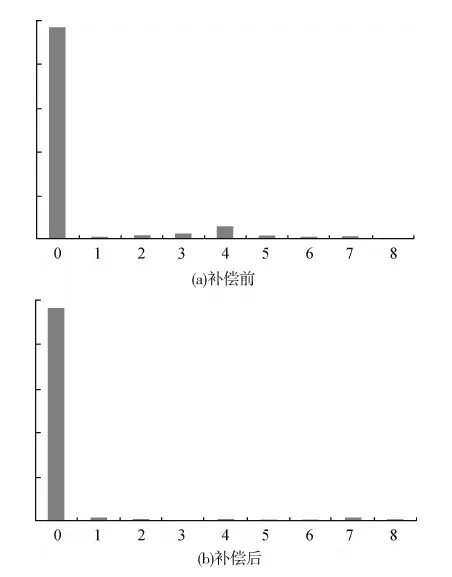
图7 定位力矩补偿前后转速谐波对比结果

4 结 论
本文在对步进电机定位力矩分析的基础上,提出了应用于直接驱动型SADM的步进电机定位力矩补偿方法,在SADM转速和转矩测量平台上对定位力矩补偿前后SADM输出轴转速进行了对比测试.试验结果表明,采用定位力矩补偿后,SADM输出轴转速中与定位力矩相关的4次谐波幅值显著减小,SADM转动速率稳定度能够提高约一倍.
[1] 高星,王友平.太阳电池阵驱动机构的通用化、系列化和组合化设计[J].空间科学学报,2002,22(增刊2): 55-68
[2] 王友平,于国庆.太阳帆板驱动机构情报研究报告[R].北京:北京控制工程研究所,2008
[3] Rodriguez F D.Electromechanical motion control systems in spacecraft applications[R].AIAA 2006-7291,2005
[4] Atlas G,Thomin G.Experiences of CNES and SEP on space mechanisms rotating at low speed[C].The 21stAerospace Mechanisms Symposium,NASA Johnson Space Center,1987
[5] Patrick S,Christine E.High performance stepper motors for space mechanisms[C].The 29thAerospace Mechanisms Symposium,NASA Johnson Space Center,1995
[6] Rajagopal K R,Bhim S.An improved high resolution hybrid stepper motor for solar array drive of Indian remote sensing satellite[J].IEEE Trans.on Industry Applications,1997,33(4): 906-913
[7] Cornelis D K.Stepper motor[R].NASA Technical Report SAI-RPT-026,1994
[8] 刘宝廷,程树康.步进电动机及其驱动控制系统[M].哈尔滨:哈尔滨工业大学出版社,1997
AHighStablityControlMethodforSolarArrayDriveMechanism
ZHANG Meng,ZHU Xiaoli,LU Jiaodi,GENG Yuanying,WANG Youping
(BeijingInstituteofControlEngineering,Beijing100190,China)
In order to improve the speed stability of solar array drive mechanism(SADM) used in a LEO remote sensing satellite and to reduce the effect of the motion of solar array on the satellite attitude stability,a compensation method for detent torque is proposed based on the detent torque analysis and testing results of direct drive SADM.A speed and torque testing equipment of SADM is used to test the driving performance with or without the detent torque compensation.The experimental results show that the speed stability of SADM is greatly improved.
SADM;step motor;detent torque;compensation;speed stability
2010-06-12
张猛(1978—),男,辽宁人,博士,研究方向为航天器控制执行机构技术(zhangm98@mails.tsinghua.edu.cn).
TM383.6
A
1674-1579(2010)04-0046-04
猜你喜欢
宇航计测技术(2021年3期)2021-08-17
微特电机(2020年11期)2020-12-30
电子制作(2017年1期)2017-05-17
电子产品世界(2016年1期)2016-03-07
空间控制技术与应用(2015年4期)2015-06-05
科技创新导报(2014年11期)2014-11-05
中国新技术新产品(2014年4期)2014-01-24
载人航天(2013年5期)2013-09-19
科学之友(2011年7期)2011-04-12