
磁天线水下接收罗兰C信号可行性研究*
2010-12-07 06:46崔国恒曹可劲许江宁朱银兵
弹箭与制导学报 2010年6期
崔国恒,曹可劲,许江宁,朱银兵
(海军工程大学,武汉 430033)
0 引言
罗兰C导航系统是一种中远程低频无线电导航系统,属于陆基、脉冲相位调制导航方式[1]。由于卫星导航系统(GPS)逐渐暴露出种种弊端,2008年美国国土安全部(DHS)宣布继续使用罗兰C,并将其升级为增强罗兰 C(e Loran)作为GPS系统的备份,使得罗兰C系统的发展得到了各国的重新 关 注,罗 兰 C/GNSS组合导航成为研究的热点,图1是美国LOCUS公司生产的罗兰C/GPS组合接收天线。
罗兰C工作频率为100k Hz,在理论上具有一定的入水深度,因此,研究罗兰C水下定位导航问题在海洋开发、水下勘探以及军事应用等方面具有重要的意义[2]。

图1 罗兰C/GPS组合接收天线
1 罗兰C信号在海水中传播的场分量
罗兰C系统的发射天线采用直立天线,其辐射的电磁波是垂直极化平面波,只存在着横向分量,即与海面垂直的电场分量E1x和与海面平行的水平磁场分量H1y[3]。波的结构场如图2所示。
而在海面与空气交界处,海面上的水平磁场H1y与导电的海面感应出二次场分量,即水平电场分量E1z。下标“1”表示在空气内传播,下标“2”表示在海水中传播,根据电磁波的边界条件有:
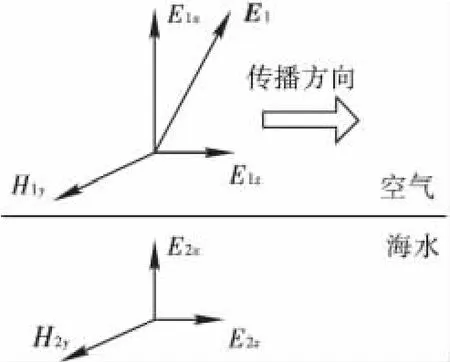
图2 波的结构场

为简化分析,通常使用M.A.列翁托维奇近似边界条件:若半导电媒质相对复介电常数的绝对值满足:

则在界面大地一侧的电、磁场水平分量之间满足:

海水是一种导电媒质,其电参数能够满足M.A.列翁托维奇近似边界条件,利用边界条件有:

在空气中有:

上两式相除即有:

再利用边界条件有:

于是上述各分量可写成:

海水是一种导电媒质,其相对电常数εr=80,σ=4,代入式(8)~式(10)可得:
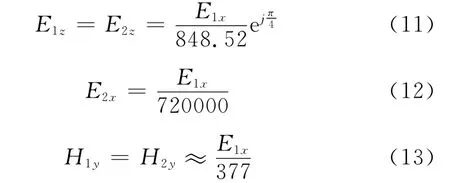
由此可得如下结论:
1)罗兰C信号在穿透海水时,各个场分量的幅度都会大幅减小,其中磁场分量衰减最小,垂直电场分量衰减最大,因此在海水中必须利用磁天线接收磁场分量进行定位解算。
2)由于波前倾斜现象产生的水平电场分量E1z相位会改变45°,利用电天线接收水平电场分量进行定位时,会产生较大的定位误差。
3)罗兰C信号的水平电场分量E1z和磁场分量H1y在穿透海水时,幅度相位都不会改变。
2 罗兰C信号场分量的仿真计算
2.1 E 1x的计算
罗兰C信号是地波传播信号,当信号沿地表传播时存在地面吸收损耗,当传播距离较远,还必须考虑球面地造成的绕射损耗。一般计算E1x有效值的表达式为[3]:

其中:A为衰减因子(mV/m);Pr为辐射功率(k W);D为方向系数;r为传播距离(k m)。

图3 海水传播布雷默曲线

罗兰C导航系统在实际使用中,主要用作船舶的导航定位,其信号的传播途径绝大部分是海水,因此,在文中计算中采用海水路径的有关电参数进行计算。假设罗兰C导航台的发射功率为2 MW,辐射效率为80%,发射天线的方向系数为3,可以计算传播不同距离时E1x的有效值,计算结果如图4所示。
衰减因子A的严格计算是比较复杂的,同电波的频率f和传播路径的电导率σ相关,文中采用国际无线电咨询委员会(CCIR)推荐的海水布雷默(Bremmer)计算曲线,如图3所示,用以计算E1x,图中衰减因子A值已计入大地的吸收损耗及球面地的绕射损耗。其使用条件是:
1)假设地面是光滑的,地质是均匀的;
2)发射天线使用短于λ/4的直立天线(D=3),辐射功率Pr=1k W;
3)计算的是E1x的有效值。
当Pr≠1k W,D≠3时,则换算关系为:
2.2 E 2x、E 2z、H 2y的计算
将上述结果代入式(11)~式(13),可以计算出罗兰C信号入水之后的垂直电场E2x、水平电场E2z和磁场强度H2y,计算结果如图5所示。
由此可见,要想在海水中接收罗兰C信号,要么使用磁天线接收磁场分量,要么使用水平电天线接收水平电场分量。然而磁场分量强度要比水平电场分量强度要高3.5d B,因此,利用磁天线水下接收罗兰C信号是最佳的选择。

图4 E 1x有效值随传播距离变化规律

图5 海水中的电、磁场强度
3 磁天线感应的电压
罗兰C单棒磁天线的模型如图6所示。

图6 单棒磁天线的模型
假设线圈部分全由导体构成,线圈的匝密度为N匝/m,线圈之间的绝缘层无限薄,线圈导线为单层绕制,天线的长度为2l,天线轴线为z轴,中点为原点。若H为天线轴向的磁场分量幅度,μc为磁芯材料的磁导率,则单位长度天线感应的电压为ωμcHSN,S为铁芯的横截面积。式(16)表示天线上的总感应电压VH[4]。

趋肤深度δc是导电介质中的波在其振幅降为导电介质表面处振幅的1/e时传播的距离,波透入5δc的距离后,其振幅降低至1%以下[5]。

罗兰C信号的频率为100k Hz,其在海水中的趋肤深度为0.8 m。由式(1)可知,对于采用高磁导率材料绕制的磁天线,当匝数为300,横截面积为0.0005 m2,传播距离为1000k m时,海水表层处的磁场强度H2y约为8.4μV/m,可以算得表层海水中的磁天线感应信号的电压为1.6 mV左右。随着微弱信号检测技术的发展,目前电路检测技术的发展水平如表1所示。
因此,虽然磁信号在海水中传播衰减较大,但在浅层水域中(10 m),罗兰C信号还是很容易被检测出来。在距离发射台1000k m的地方,使用磁天线和电天线在水下接收信号,当采用不同检测分辨率,能在海水中接收信号的海水深度如图7所示。

表1 检测的最高分辨率[6]
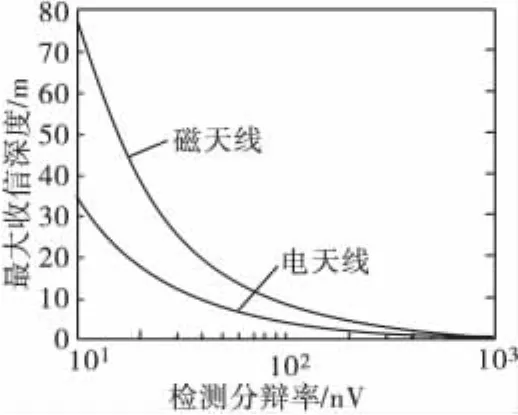
图7 检测分辨率 收信深度曲线
4 实测数据分析
磁天线接收信号经过前置低噪声放大、低通滤波、自动增益放大处理,然后对信号进行数字量化,并进行数字滤波及台链分离处理。接收机前端采样率为10 M,接收距离为700k m。图8是磁天线在深度为0.3 m时采集到的信号电压强度。图9是磁天线在深度为10 m时采集到的信号电压强度。
从实验结果分析来看,罗兰C磁信号入水没有衰减,但在水中传播时衰减较大;罗兰C磁天线能在水下0.3 m实现定位解算,定位结果较准确,信号具有较强的信噪比;水下10 m时,信号的信噪比较低,搜索跟踪时间太长,第三周期过零点跟踪不太准确,必须对多个信号脉冲进行累积,才能完成定位解算,定位结果误差较大。罗兰C信号在海水中传播

图8 海面信号电压强度
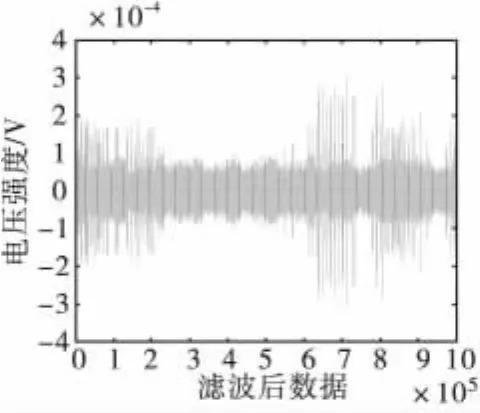
图9 水下10 m信号电压强度
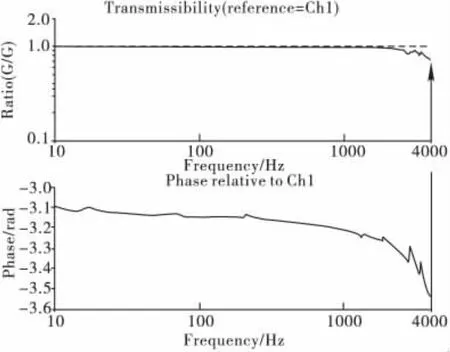
图9 Hopkinson杆试验装置
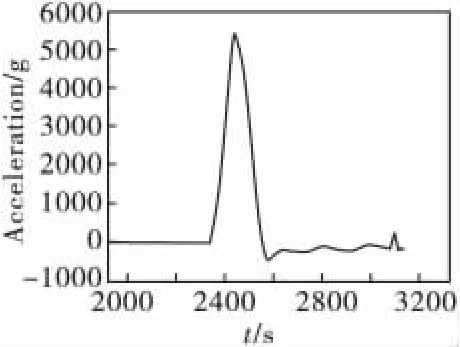
图10 多普勒峰值加速度信号
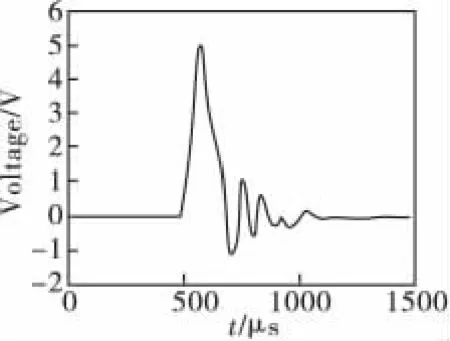
图11 10000g加速度计单元输出信号
4 结论
文中设计了一种硅微复合量程加速度计,并对其进行了静力学分析和动力学分析。采用体硅加工工艺和封装工艺完成了对硅微复合量程加速度计的制作,最后通过对硅微复合量程加速度计特性标定,验证该硅微复合量程加速度计具有较好的性能,可同时工作在四个量程。
硅微复合量程加速度计能够覆盖多种量程,能够准确测量在量级上相差很大的过载值,并保证测量的准确性,低量程单元具有抗高过载保护功能。文中研究硅微复合量程加速度计及其测量系统,可以在不同工作环境下满足不同的测试要求和控制要求,有效实现多参数测量和多功能控制。
[1] 袁希光.传感器技术手册[M].北京:国防工业出版社,1986:420-421.
[2] Marzullo K.Tolerating failures of continuous-valued sensors[J].ACM Trans on Co mputer System,1990,8(4):284-304.
[3] 谢元睿,刘晓明.105g压阻效应阵列式加速度微传感器硅悬臂梁结构分析[J].电子机械工程,2004,20(6):54-56.
[4] 上海化工学院无锡轻工业学院编.工程力学[M].北京:高等教育出版社,1978.
[5] Allen H V,Terry S C,De Bruin D W.Accelerometer systems with selftestable features[J].Sensors and Actuators,1989,20(1/2):153-161.
[6] Bao Minhang.Micro mechanical transducers-pressure sensors,accelerometers and gyroscopes[M].ELSEVIER,2000.
[7] Hans-J urgen von Martens,Angelika Taubner,Wolfgang Wabinski,et al.Traceability of vibration and shock measurements by laser interfero metry[J].Measurement,2000,28(1):3-20.
猜你喜欢
军民两用技术与产品(2021年7期)2021-10-13
上海计量测试(2021年4期)2021-09-13
煤气与热力(2021年4期)2021-06-09
文苑(2020年10期)2020-11-07
中国惯性技术学报(2019年1期)2019-05-21
特别文摘(2017年13期)2017-11-11
中国核电(2017年1期)2017-05-17
探测与控制学报(2015年4期)2015-12-15
课堂内外(小学版)(2015年6期)2015-09-10
导航定位与授时(2014年2期)2014-04-27
