基于位置内环的骨骼服力控制方法
2010-11-29 09:52杨智勇归丽华杨秀霞顾文锦
中南大学学报(自然科学版) 2010年1期
杨智勇 ,归丽华 ,杨秀霞,顾文锦
(1. 海军航空工程学院 战略导弹工程系,山东 烟台,264001;2. 总后勤部 华东军用物资采购局,上海,200000;3. 海军航空工程学院 研究生一队,山东 烟台,264001;4. 海军航空工程学院 控制工程系,山东 烟台,264001)
骨骼服又称为外骨骼机器人,是结合了人的智能和机械装置的机械能量的一种特殊机械系统[1−2]。骨骼服的研究历史可以追溯到20世纪六七十年代。骨骼服仍有许多关键技术如控制问题存在不完善之处,如日本的HAL采用肌电传感器测量人的意识[3−5],产生控制信号,但这种方法存在致命的缺点:(1) 在激烈运动下,容易脱落、易位;(2) 经过长时间运动后,人体出汗会影响传感器的测量;(3) 传感器随人的个体不同,存在一定的差异;(4) 传感器每次都要贴到人体表面,使用不便。美国的 BLEEX(Berkeley Lower Extremity Exoskeleton)采用了一种称为灵敏度放大控制(Sensitivity amplification control,SAC)的控制方法[6−10]。该方法不需要在人机之间安装任何测量装置,仅通过安装在骨骼服上的传感器就能实现对骨骼服的控制,并使得操作者感受到的力最小。但是,SAC方法过分依赖于系统的动态模型,而骨骼服又是一个多刚体、多自由度的非线性系统,要建立其精确的数学模型非常困难。Liu等[11]采用ZMP(Zero moment point,零力矩点)控制方法来控制骨骼服跟踪人体运动,其仍需要在人体上安装传感器,使用不便,同时,ZMP控制算法较复杂[12]。针对这些问题,本文作者提出一种基于位置内环的骨骼服力控制方法。该方法首先建立骨骼服的位置控制内环,再采用多维力/力矩传感器测量操作空间中人作用于骨骼服的力/力矩信息,构造位置内环的参考输入信号,控制骨骼服跟随人体运动,进而减小人机作用力。该方法具有3个优点:一是不需要使用肌电传感器,有效避免了肌电传感器带来的诸多不便;二是该方法不需要系统精确的数学模型,克服了复杂模型带来的困难;三是由于存在位置内环,使得控制器对负荷的变化具有很强的鲁棒性。本文作者分析所设计控制器的稳定性,对骨骼服支撑腿的蹲起动作进行仿真,验证控制器的有效性和可行性,并分析控制器的鲁棒性。
1 基于位置内环的直接力控制
骨骼服系统的动力学模型可以用一个二阶动态系统来表示[13]:


其中:f为操作者在操作空间施加于骨骼服躯干的广义力,包括力和力矩;J(q)为骨骼服躯干的几何雅可比矩阵。
骨骼服基于位置内环的力控制原理如图1所示。其中 Ga表示骨骼服的动力学模型,即式(1);H表示人机之间的交互模型,C表示控制器。设计控制率为:

其中:τ为驱动器施加的广义力和力矩;G(q)为用于补偿重力的力矩;KD为正定增益矩阵;−KD为关节提供一个额外的阻尼力矩,可改善系统的动态响应过程。
中间控制量τ为:

则系统首先成为1个位置控制环。其中:KPp是可设计的比例系数;pc和pe分别表示骨骼服末端在操作空间的参考位置和实际位置。

图1 骨骼服基于位置内环的力控制原理图Fig.1 Block diagram of exoskeleton suit’s force controller based on inner position loop
在骨骼服的控制中,pc可由人机交互力来估计,即

本文由多维力/力矩传感器测量人机交互力 f,并设计:

由此,形成了骨骼服的力控制外环。其中:Kp为可设计的比例系数。由式(3),(4)和(6)可得:在稳态时,

可以看出,人机作用力存在稳态误差。为了消除稳态误差,引入积分项,即令

其中:KI为可设计的积分系数。则可保证在稳态时,

2 仿真
采用Matlab中的SimMechanics工具箱建立人和骨骼服的机械模型,二者在躯干重心处相连,人和骨骼服的质量属性和几何属性采用Winter提出的人体参数[9]来描述。图2所示为骨骼服支撑相示意图,其中:Ls和Lt分别表示骨骼服小腿和大腿的长度;LGub为骨骼服躯干重心至髋关节的长度;qe=[q1q2q3]T,表示骨骼服在关节空间的关节角度向量;坐标系 OXYZ为骨骼服的局部坐标系,其原点与骨骼服躯干重心重合;θ为骨骼服躯干相对于OY轴的转角,则骨骼服躯干重心在操作空间的位置可以表示为pe=[pxpyθ]T。在骨骼服躯干的重心处安装1个多维力/力矩传感器,传感器的另一端可以通过其他装置与人体相连,则此传感器可以测量人机之间的作用力 f=[fxfyTz]T(其中:fx和fy分别是X方向和Y方向的人机作用力,Tz为绕Z轴的人机作用力矩)。
仿真时,需要人与骨骼服之间作用力f的数学模型。对于2个刚体之间的作用力,可以用1个弹簧模型来描述,而在骨骼服系统中,骨骼服是刚性的,人则具有一定的柔性,因此,采用弹簧阻尼模型来表示人机之间的作用力[14−15],即

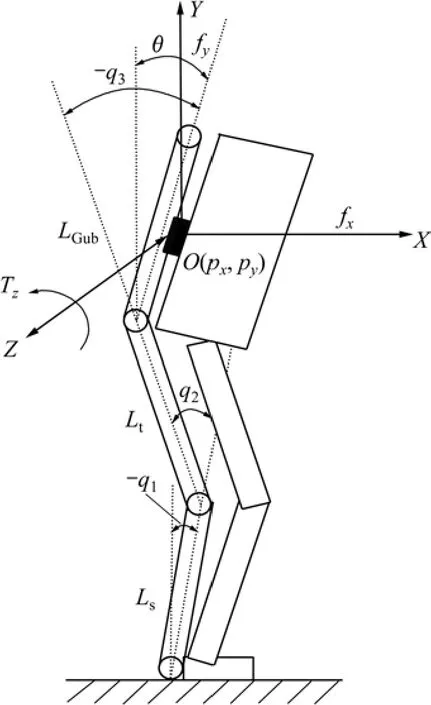
图2 骨骼服支撑相示意图Fig.2 Diagram of support phase of exoskeleton suit
其中: Δ phe=ph−pe,为人机之间的广义坐标误差;ph表示操作者在操作空间的广义坐标;KPf为人机之间的弹簧系数;KDf为人机之间的阻尼系数。这些参数不仅由于操作者个体的不同而不同,且对同一个操作者来说,在不同的时刻,也是不同的。
以人体带动骨骼服做蹲起动作后静止站立为例进行仿真,仿真结果如图3~5所示。图3所示为关节角跟踪曲线,其中:实线描述操作者在关节空间的关节角,点划线描述骨骼服在关节空间的关节角。由图3可以看出:2条曲线几乎重合,说明骨骼服对人体的运动跟踪效果良好,跟踪误差很小。
图4所示为在操作空间中操作者的位置和骨骼服的位置曲线,由图3中数据根据关节空间和操作空间的几何关系转换而来,其中实线描述操作者躯干重心在操作空间的位置,虚线描述骨骼服躯干重心在操作空间的位置。由图4可以看出:骨骼服在操作空间也跟踪了人的运动,由于在X方向操作者和骨骼服的运动都很小,所以,二者之间出现的偏差不大。
图5所示为操作空间中的人机交互力,其中:实线描述控制器不工作时的人机力,即骨骼服的所有控制力均由操作者施加;虚线描述控制器工作时的人机力,即骨骼服的控制力矩有操作者施加的人机力,也有控制器施加的控制力矩。由图5可见:当控制器工作时,人机作用力/力矩大大减小,意味着操作者的能量消耗大大降低;3 s前的人机作用力是蹲起动作中的人机作用力,3 s后的人机作用力是蹲起后直立静止阶段的人机作用力。可见:不管是动态过程还是静态过程,所设计的控制器均能显著减小人机作用力,而且在静态情况下,人机作用力收敛于0,说明在静态时,骨骼服在控制器的控制下可以保持站立不动,不需要操作者额外施力。这表明所设计的控制器达到了期望的控制目的,是有效的、可行的。

图3 关节空间的角度跟踪曲线Fig.3 Angle tracking curves in joint space

图4 操作空间的位置跟踪曲线Fig.4 Position tracking curves in task space
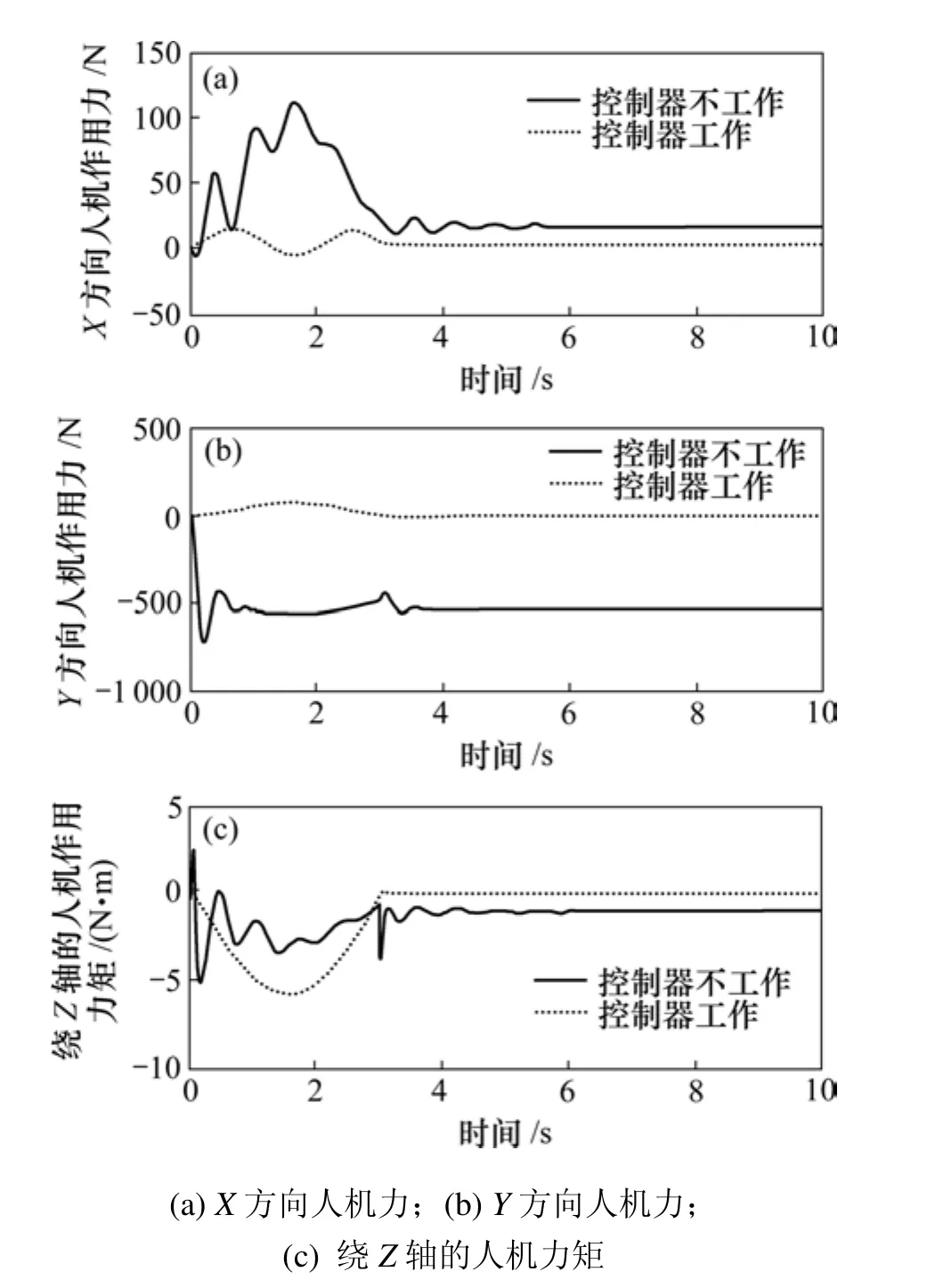
图5 操作空间的人机作用力Fig.5 Human-machine interaction force in task space
需说明的是:本文作者仅针对支撑腿进行仿真,摆动腿的控制可以采用其他方式,甚至可以不加控制,完全由操作者来控制。这是由于骨骼服的控制目标是减小人体背负负荷时的能量消耗,而这种消耗主要来自支撑腿。
2.1 人机交互模型参数对人机作用力的影响
式(10)所示的人机交互模型中的参数反映了人和骨骼服之间的相互作用,对于不同的操作者如强壮者、瘦弱者来说,这些参数是不同的。为此,对不同操作者穿戴骨骼服的情况进行仿真,以观察控制器的控制效果。
令
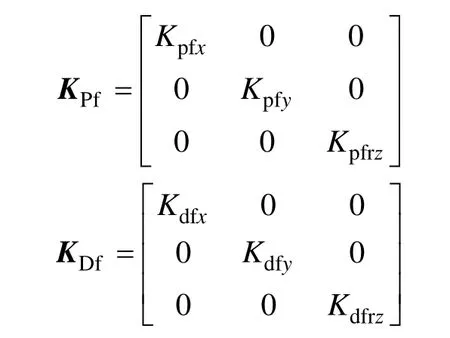
其中:Kpfx,Kpfy和Kpfrz分别表示X方向、Y方向和绕Z轴旋转方向的弹簧系数;Kdfx,Kdfy和Kdfrz分别表示X方向、Y方向和绕Z轴旋转方向的阻尼系数。随机选择4种不同的参数进行仿真,每组参数对应不同的弹簧系数和阻尼系数,如表1所示。

表1 人机交互模型参数Table 1 Human-machine interaction model parameters
人机交互模型参数变化时,在关节空间和操作空间的轨迹跟踪效果较好。图6所示为人机交互模型参数变化时人机作用力的变化曲线。图中参数1~4分别对应表1中参数1~4的仿真结果。由图6可见:在X方向,随着人机交互模型参数逐渐变小,人机作用力也逐渐变小。其原因是在X方向上的位置跟踪误差逐渐减小,而在Y方向和绕Z轴旋转方向的位置跟踪误差始终较小,所以,人机力的变化也不大。这说明所设计的控制器对环境(操作者)的变化具有一定的鲁棒性。
2.2 负荷变化对人机作用力的影响
控制器中的重力补偿项G(q)中包括骨骼服几个环节刚体的质量属性,其中,骨骼服的躯干质量又包括2部分:一是骨骼服躯干本身的质量,二是所背负负荷的质量。在实际使用过程中,所背负的负荷的变化会引起躯干质量的变化,且这个变化是未知的。本文分别对4种情况进行仿真,以研究负荷变化对控制器的影响。这4种情况是:正常情况,即没有负荷;负荷和骨骼服躯干的总质量m总分别为原骨骼服躯干质量m的120%,140%和160%。仿真结果如图7所示。由图7可以看出:负荷虽然增加,但人机力并无变化。从直观上看,若无骨骼服的作用,人背负的负荷增加时,人需要对负荷施加更多的力来抵消负荷的重力。但在使用骨骼服后,当负荷增加时,操作者施加的作用力与没有负荷时操作者施加的力相近,说明所设计的控制器能消除负荷变化带来的影响,即对负荷变化具有很强的鲁棒性。
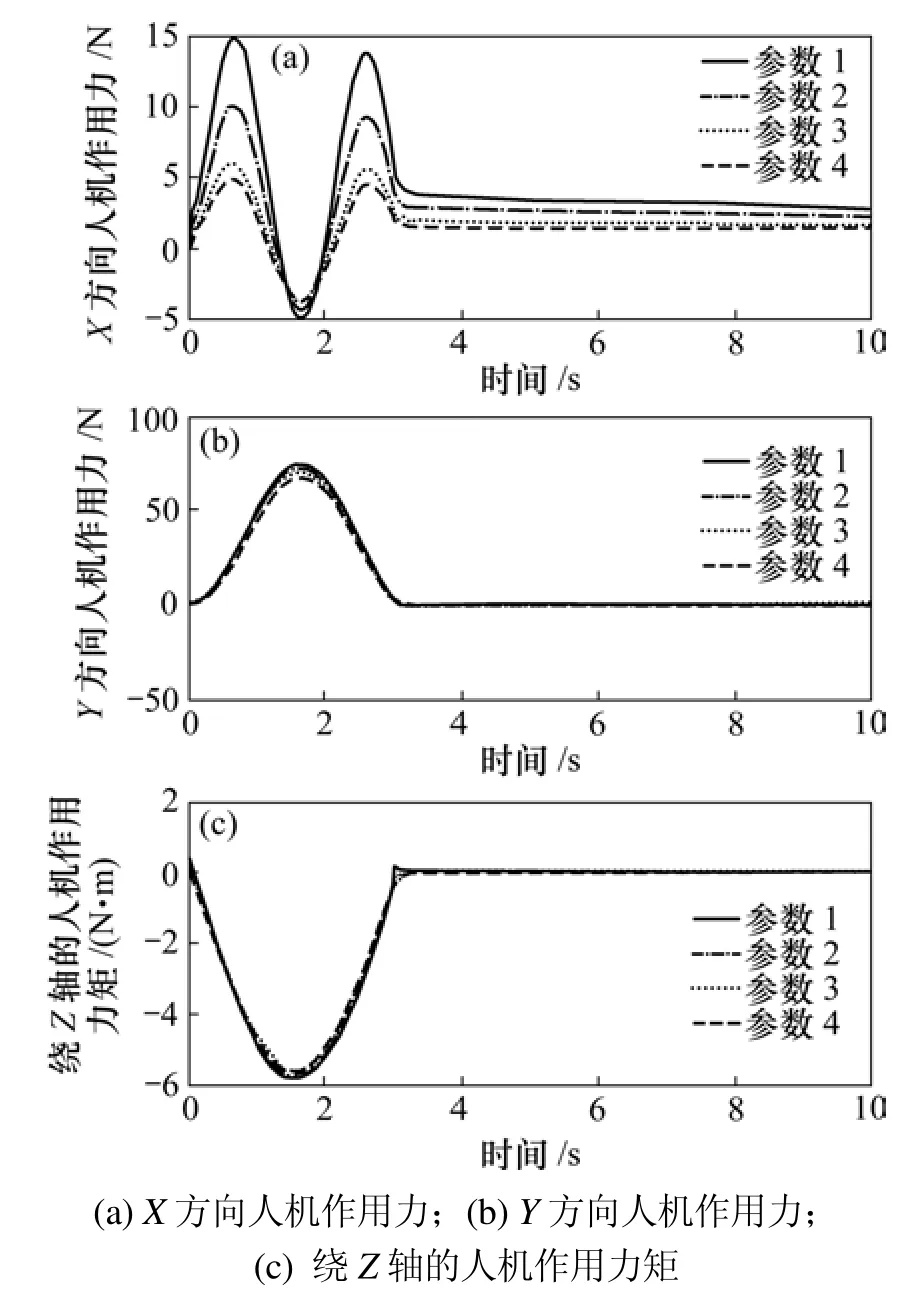
图6 人机交互模型参数变化时操作空间的人机作用力Fig.6 Human-machine interaction forces in task space when human-machine interaction model parameters vary
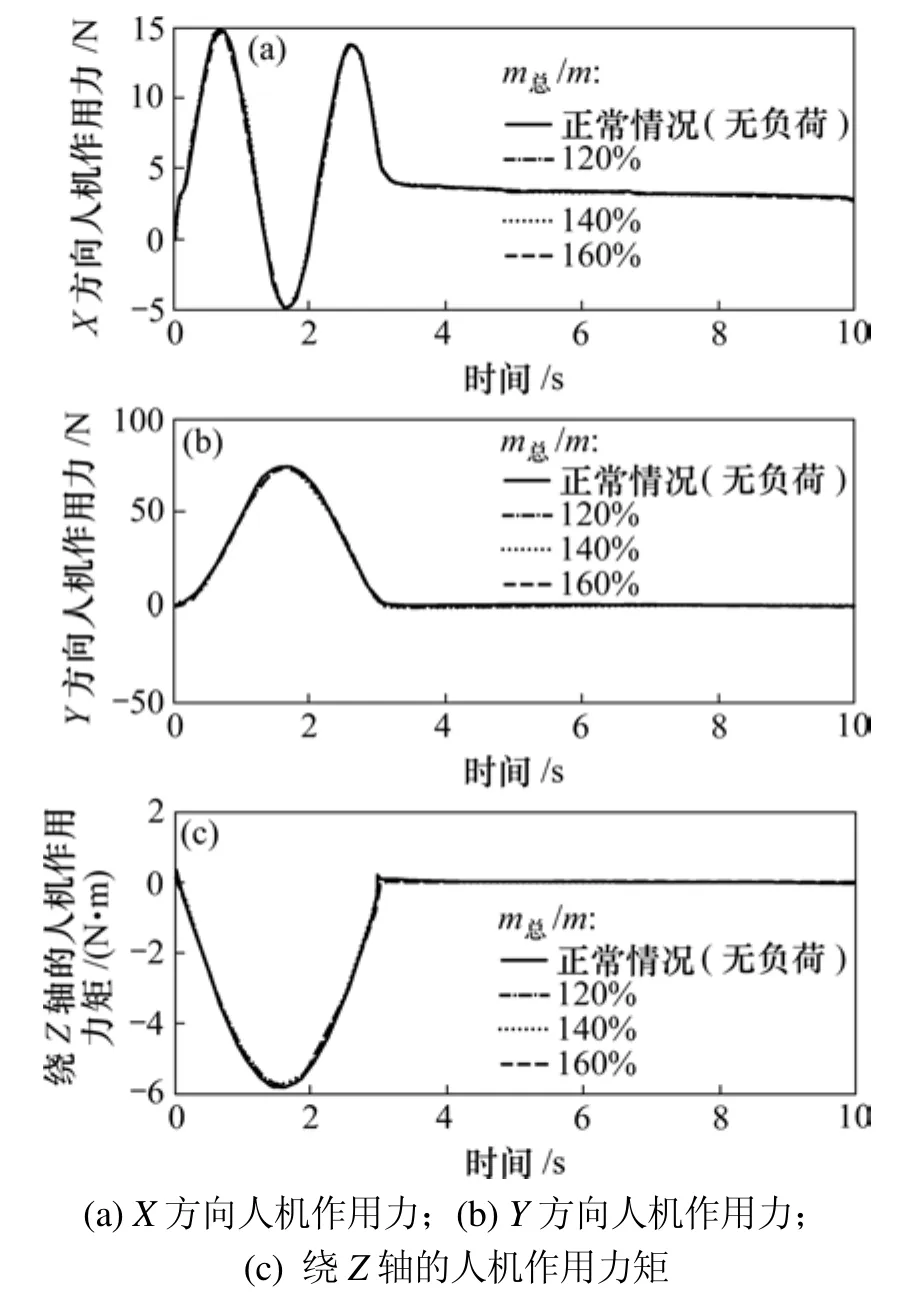
图7 负荷变化时操作空间的人机作用力Fig.7 Human-machine interaction forces in task space when load varies
3 结论
(1) 基于系统的静态模型,将骨骼服的位置控制器作为内环,无需系统精确的数学模型,采用多维力/力矩传感器测量在躯干重心附近人体对骨骼服的作用力,并利用此信息构造位置内环的参考输入信号,形成力控制的外环,与人体之间的耦合简单、方便。在动态过程中,该控制器控制人机之间的作用力较小,在稳态时收敛于0,达到了预期的控制目的。
(2) 控制器对环境(操作者)变化和负荷变化具有很强的鲁棒性。与无骨骼服的辅助情况相比,背负同样的负荷,人体所施加的力/力矩大幅度减小。
[1]Aaron M D, Hugh H. Lower extremity exoskeletons and active orthoses: Challenges and state-of-the-art[J]. IEEE Transactions on Robotics, 2008, 24(1): 144−158.
[2]归丽华, 杨智勇, 顾文锦, 等. 能量辅助骨骼服NAEIES的开发[J]. 海军航空工程学院学报, 2007, 22(4): 467−470.GUI Li-hua, YANG Zhi-yong, GU Wen-jin, et al. Development of power assistance exoskeleton suit (NAEIES)[J]. Journal of Naval Aeronautical and Astraunotical University, 2007, 22(4):467−470.
[3]Fleischer C, Hommel G. A human-exoskeleton interface utilizing electromyography[J]. IEEE Transactions on Robotics, 2008,24(4): 872−882.
[4]Lee S, Sankai Y. Power assist control for walking aid with HAL-3 based on EMG and impedance adjustment around knee joint[C]//Proceedings of 2002 IEEE/RSJ International Conference on Intelligent Robots and Systems. EPFL,Switzerland, 2002: 1499−1504.
[5]Kawamoto H, Sankai Y. Power assist system HAL-3 for gait disorder person[C]//International Conference on Computers Helping People with Special Needs. Linz, Austria, 2002:196−203.
[6]YANG Zhi-yong, GUI Li-hua, YANG Xiu-xia, et al. Simulation research of exoskeleton suit based on sensitivity amplification control[C]//Proceedings of the IEEE International Conference on Automatic and Logistics. Jinan, China, 2007: 1353−1357.
[7]Justim G, Ryan S, Kazerooni H. Control and system identification for the berkeley lower extremity exoskeleton(BLEEX)[J]. Advanced Robotics, 2006, 20(9): 989−1014.
[8]HUANG Li-hua. Robotics locomotion control[D]. Berkeley:College of Mechanical Engineering, University of California,2005: 36−44.
[9]Jean-Louis C R. Control of a lower extremity exoskeleton for human performance amplification[D]. Berkeley: College of Mechanical Engineering, University of California, 2003: 341.
[10]YANG Zhi-yong, GUI Li-hua, YANG Xiu-xia, et al. Simulation research of exoskeleton suit based on neural network sensitivity amplification control[C]//2008 Chinese Control and Decision Conference. Yantai, China, 2008: 3256−3260.
[11]LIU Xiao-peng, Low K H, YU Hao-yong. Development of a lower extremity exoskeleton for human performance enhancement[C]//Proceedings of 2004 IEEE/RSJ International Conference on Intelligent Robotics and Systems. New York,America, 2004: 3889−3894.
[12]王剑, 马宏绪, 秦海力. 不平整地面上的仿人机器人步行稳定性检测方法[J]. 中南大学学报: 自然科学版, 2007, 38(1):504−509.WANG Jian, MA Hong-xu, QIN Hai-li. Stability estimation of humanoid walking on irregular terrain[J]. Journal of Central South University: Science and Technology, 2007, 38(1):504−509.
[13]Bruno S, Luigi V. Robot force control[M]. London: Kluwer Academic Publishers, 1999: 10−11.
[14]Jung S, Hsia T C, Bonitz R G. Force tracking impedance control for robot manipulators with an unknown environment: Theory simulation and experiment[J]. International Journal of Robotics Research, 2001, 20(9): 765−774.
[15]WANG Heng, Low K H, Wang M Y. Reference trajectory generation for force tracking impedance control by using neural network-based environment estimation[C]//IEEE Conference on Robotics, Automation and Mechatronics. Bangkok, Thailand,2006: 1−6.
猜你喜欢
体育科技文献通报(2022年4期)2022-10-21
影像研究与医学应用(2021年15期)2021-09-12
科学与财富(2020年28期)2020-12-14
诗选刊(2019年9期)2019-11-20
无线互联科技(2018年20期)2018-12-27
中学生数理化·高三版(2016年2期)2016-09-10
中学生数理化·高二版(2016年6期)2016-05-14
科学中国人(2016年35期)2016-01-28
中国康复理论与实践(2015年7期)2015-05-09
中国卫生(2014年5期)2014-11-10