
注射剂可见异物检测气泡干扰消除方法的研究
2010-11-20 02:23谢代梁黄震威张永超
中国计量大学学报 2010年4期
郭 斌,程 佳,谢代梁,黄震威,张永超
(1.中国计量学院计量测试工程学院,浙江杭州310018;2.浙江省计量科学研究院,浙江杭州310013)
医药注射剂在我国临床应用上十分的广泛,但是由于生产环境以及加工等因素的影响,在注射剂中难免会有玻璃屑、铝屑、毛发等杂质异物.目前,国内的医药注射剂厂家普遍采用人工灯检,通过肉眼观测的方式将不合格试剂剔除,由于受疲劳程度和人的主观影响,这种方式稳定性差、精度低、误检率高.
机器视觉是利用计算机来实现人的视觉功能,也就是用机器代替人眼来做测量和判断[1,2].机器视觉涉及到人工智能、计算机科学、图像处理和模式识别等多个领域,主要通过相机采集图像,利用计算机完成对图像的分析处理,最终用于实际的检测、测量和控制[3,4].基于机器视觉技术的可见异物检测设备,国外已经有一些成品,但是由于设备昂贵而且由于各国制药环境的差异,导致国内厂家引进国外设备来进行检测的效果不理想.因此,研究适合我国国情的医药注射剂检测设备迫在眉睫.随着计算机软件、硬件的发展,数字图像处理的理论和方法不断完善,利用机器视觉实现产品质量无接触自动检测的技术已逐渐变得切实可行,因此可以尝试将机器视觉技术应用于医药注射剂中可见异物的自动检测,以实现医药注射剂生产的快速、自动检测与控制[5,6].
1 检测系统结构
针对医药注射剂的全自动在线异物检测系统硬件结构主要包括专用的机械机构、200万像素高速CCD相机、LED点光源和高性能计算机及显示器.整个系统处理流程图如图1.通过CCD摄像机拍摄生产线上每瓶药液的序列图像,通过有效的异物识别算法对其中的可见异物做出识别判断,最后给主控系统发出一个判断信号,利用分瓶机构对相应药瓶进行分瓶处理.
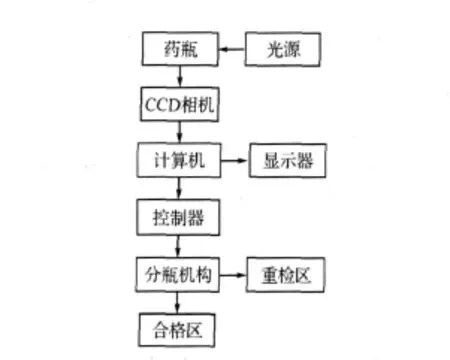
图1 系统处理流程图Figure 1 Flowchart of the Processing System
2 检测算法
检测系统必须能完成多幅图像的实时采集和同步处理.图像处理与识别模块必须具有高精度和实时性的特点.在医药注射剂检测中,可见异物类型具有多样性和随机性,加上瓶体存在的玻璃气泡、花纹和瓶外壁吸附的杂质等均会产生干扰,因而,快速鲁棒的可见异物检测识别算法是系统检测的核心,也是该系统主要技术难点.本文算法思路如下:首先采集原始图像,通过差分及能量累积算法消除大量静止背景噪声,然后通过设置阈值将图像二值化[7].之后通过对二值化图像进行边缘检测并计算目标特征值,最后根据特征值进行判别从而识别出异物.检测算法流程如图2.
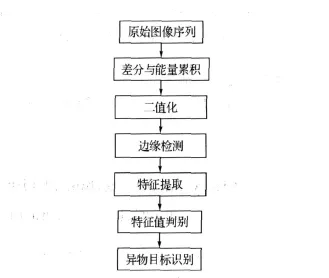
图2 药液检测算法流程图Figure 2 Flowchart of the Detection Algorithm
2.1 图像采集
由于可见异物(包括玻璃碎屑、铝屑、橡皮屑、毛发等)在药液静止时,一般沉在瓶底,不便实现自动检测.为了能够搅动起药液中的异物杂质,设计了专用的机械机构,使其夹紧药瓶口,让药瓶在电机带动下作离心转动.这样,瓶底中的小异物便被搅动起来,并随药瓶一起作离心旋转.离心旋转的速度和时间要保证瓶底的全部异物被搅动起来.当离心旋转到适当速度时,关闭电机,此时瓶子停止旋转,少量气泡平息但瓶内的颗粒异物仍在离心转动时,相机拍摄序列图像.
2.2 背景抑制
图像拍摄的过程中,难免会存在噪声[8].药液图像由目标和背景噪声组成.其中目标主要是颗粒异物,而药液图像背景噪声是需要去除的.药液图像背景干扰主要有以下几种形式[9].
1)注射剂瓶壁上划痕、字体和刻度线;
2)注射剂液面形成的反光区域;
3)注射剂外壁污物;
4)气泡等随机噪声;
其中,前3种原因形成的噪声在连续各帧图像中是静止的,因此采用差分与能量累积处理算法,把两帧中相同的静止背景去掉,只保留了可见异物和少量残留噪声.
差分与能量累积算法[10,11]流程如下:
对相机拍摄到的3帧图片,记为:

首先由式(1)计算两帧的差分图像:

此时通过差分图像将静态背景消除,对差分图像按式(2)进行第二次差分:

再按式(3)计算两幅差分图像的能量累积:

最后按式(4)将累积后图像和第二次差分图像相减:

此时,得到的图像中消去了静态背景干扰,并使异物目标得到加强.
图3(a)是相机拍摄的原始图片,图3(b)的是经过差分与能量累积算法后的效果.
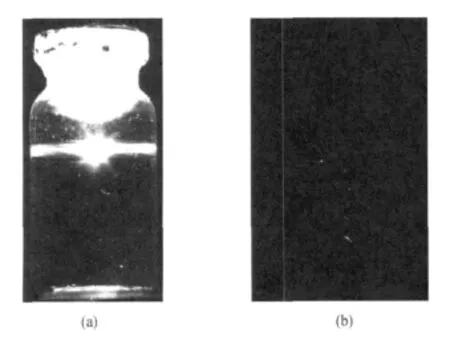
图3 (a)药液原始图像;(b)去除背景噪声图像Figure 3 Original image(a);Image after remove background noise(b)
2.3 气泡干扰消除
气泡等随机噪声在图像中的位置是随机的、无规律的,是识别异物目标的主要噪声.对于气泡干扰的消除,文献[2]提出了一种支持向量机分类的方法.在本文中,根据气泡和异物杂质在多个特征值上的差异性加以区分.在背景噪声去除后,为了进一步辨识可见异物和残留的随机噪声,需要对可能目标进行特征提取.在选择目标的特征时,所选择的特征要对目标大小、平移和旋转变化均具有较好的不变性.提取对这些变化具有良好不变性的特征值作为目标特征,就可以获得良好的匹配和识别效果.通过多次实验发现以下特征值具有良好的不变性.
1)透光度α
2)长宽比P
3)紧凑度C
透光度是指一定面积上透射光通量与入射光通量的比值,透光度通常小于1.
长宽比和紧凑度是目标形状特征的一种度量.首先计算每个目标的最小外接椭圆,设Ra表示最小外接椭圆的长轴长度,Rb表示最小外接矩形的短轴长度,则P=Rb/Ra则为目标的长宽比.设目标的面积为S,周长为L,则C=L2/4Aπ为目标的紧凑度.由于可见异物目标的不规则形状,使其在长宽比和紧凑度的值上和气泡区分开来.一般说来,气泡的长宽比在1左右,目标异物的长宽比大于1.5,由于气泡为圆形,紧凑度在1左右,而目标异物的紧凑度一般都大于1.
首先对透光度进行分析,一般的可见异物比如毛发、铝屑、橡皮屑和纤维等都是不可透光的杂质,而气泡具有较好的透光性,所以透光度能够对一般不透光的杂质进行较好分离.其次,计算目标的长宽比和紧凑度,实现目标异物和气泡的最终识别.经过大量实验,得到特征值的具体判据如下式.

当计算出目标的特征值满足式(5)时,则可判断出已找到异物目标,若不满足则判断此目标为气泡干扰.最后利用测量模块计算杂质数量并给主控系统一个判断信号.图4(a)标示出经过透光度α判据后,初步判断得到的可能异物目标,均用红色圆圈标记出.从图中可以看出气泡干扰还是比较多.图4(b)标示出当经过紧凑度P判据后,绝大部分气泡干扰得到消除.图4(c)标示出在最后通过长宽比C判据处理后最终图像,气泡干扰消除,杂质目标被识别.
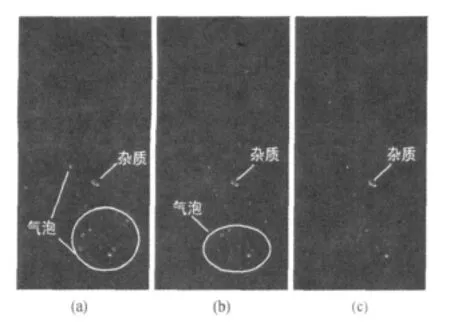
图4 (a)透明度判据后图像;(b)紧凑度判据后图像;(c)处理后的最终图像Figure 4 Image after αcriterion(a);Image after C criterion(b);Image after P criterion(c)
3 实验分析
为了验证本系统对医药注射剂中可见异物检测的有效性和可靠性,进行了实验研究.实验中系统采用200万像素高分辨率CCD黑白相机、工业镜头,点光源和高性能计算机及显示器.软件部分主要包括图像采集及处理、通讯、数据库及人机界面等功能.用厂家提供的10mL有异物杂质的瓶子、10mL纯净氯化钠溶液以及10mL含有 60μ m标准粒子进行试验.实验结果如表1.
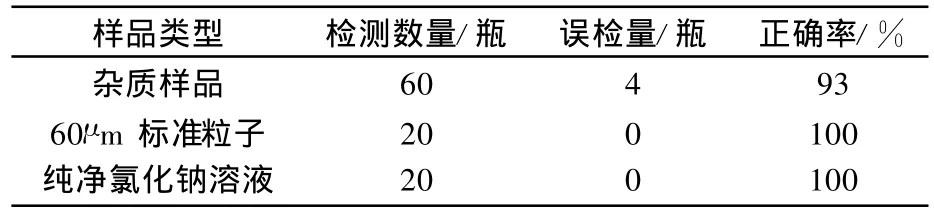
表1 异物检测结果Table 1 Inspection result of detection
表1中,误检量是指药品中存在可见异物而系统未能检测,即当作纯净药品处理.从表中可以看出,对于无杂质纯净的氯化钠溶液,系统并不会检测出有杂质.整个系统对可见异物的检测正确率达93%以上,相对于人工灯检,本系统对医药注射剂的检测实现了稳定性好、精度高、误检率低的要求.
4 结 语
设计了一种医药注射剂可见异物检测系统,提出一种可见异物检测算法并进行了实验研究.针对异物检测拍摄图像中的气泡干扰,计算其相关特征值,并根据气泡和异物目标的特征值的差别加以区分.通过实验验证,该算法能有效的消除气泡噪声的干扰从而识别目标异物.实验结果表明系统对可见异物检测的正确率达93%以上.
[1]鲁 娟,王耀南,余洪山,等.大输液中可见异物智能在线检测系统设计[J].计算机测量与控制,2008,16(12):1802-1805.
[2]周博文,王耀南,葛 继,等.基于机器视觉的医药注射剂智能检测系统研究[J].机器人,2009,31(1):53-60.
[3]邬文俊,何 涛,吴庆华.轴承漏针自动检测系统[J].中国计量学院学报,2008,19(1):29-33.
[4]杨立娜,单越康,周 铭.机器视觉的石墨轴承同轴度检测系统[J].中国计量学院学报,2007,18(1):26-28.
[5]DUAN F,WANG Y N,LIU H J,et al.Empty bottle inspector based on machine vision[C]∥Proc of the 3rd Int.Confon Machine Learning and Cybernetics.Shanghai:IEEE,2004:3845-3850.
[6]M ICHAEL K CHEEZUM,WILLIAM F.Quantitative comparison of algorithms for tracking sing le fluorescent particles[J].Biophyrsical Journal,2001,81(10):2378-2388.
[7]单越康,卫 力,毛谦敏.复杂几何形状零件自动检测[J].中国计量学院学报,1997(2):38-45.
[8]蒋登峰,周 娟.图像处理在晶圆瑕疵自动标记系统中的应用[J].中国计量学院学报,2009,20(2):167-170.
[9]杨福刚,孙同景,宋松林.基于机器视觉的全自动灯检机关键技术研究[J].仪器仪表学报,2008,29(3):562-566.
[10]SONG H,SHI F.A real-time algorithm for moving objects detection in video images[C].Proceedings of the 5th World Cong ress on Intelligent Control and Automation.Piscataway,NJ:IEEE,2004:4108-4111.
[11]李杨果,王耀南,王 威.基于机器视觉的大输液智能灯检机研究[J].光电工程,2006,33(11):69-74.
猜你喜欢
中老年保健(2022年4期)2022-08-22
数学物理学报(2021年6期)2021-12-21
数学物理学报(2021年5期)2021-11-19
中老年保健(2021年9期)2021-08-24
数学物理学报(2021年3期)2021-07-19
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
昆明医科大学学报(2020年12期)2021-01-26
装备制造技术(2020年4期)2020-12-25
兽医导刊(2019年1期)2019-02-21
中成药(2018年2期)2018-05-09
