
一种车钟挡位随动系统的设计
2010-11-10 06:18芦宁
上海船舶运输科学研究所学报 2010年1期
芦 宁
(上海船舶运输科学研究所研究开发中心,上海200135)
0 引 言
随着世界造船业的兴盛,近些年与船舶相关的技术飞速发展,其中,船舶机舱自动化设备的设计在功能上也更趋完善和人性化,比如,在主机遥控中的车钟系统的设计上,为避免操作部位在侧翼与驾驶室之间切换过程中,车令的不同引起主机转速的骤然变化,对具有侧翼操作功能的系统添加了随动功能,达到了很好的效果。
1 执行元件的选型
根据随动系统要求精确控制的特点,步进电机及伺服电机都能适合其需求,虽然后者在性能上要优于前者,但伺服电机过高的成本阻碍了它的广泛应用。目前,在国内数字控制系统中,步进电机的应用更为广泛。
1.1 步进电机的技术特点
步进电机是一种将数字式电脉冲信号转换成机械角位移的机电执行元件,严格地说,它是一种数字伺服执行元件[1],具有以下特点:
1.可以用数字信号直接进行开环控制,整个系统简单、价廉;
2.位移与输入脉冲信号数相对应,步距误差不长期积累,可以组成结构较为简单而又具有一定精度的开环控制系统,也可以在要求更高精度时组成闭环控制系统;
3.无刷,电动机本体部件小,可靠性高;
4.具有转矩大、惯性小、易于起停、响应频率高等优点;
5.停止时,可有自锁能力。
正由于步进电机具有的这种结构简单、运行可靠、控制方便、与数字设备兼容、价格便宜等优点,其被广泛应用在数控机床、机器人、自动化仪表等领域[2]。
车钟的随动过程就是用执行元件代替人手操作,推动车钟手柄到特定挡位的过程。其要求执行元件响应快速,定位准确,且车钟采用数字化设计,采用MCU控制,从车钟的体积、随动特点、成本等多方面考虑,执行元件选用步进电机是很好的选择。
2.2 步进电机的主要参数
选择和使用步进电机,要根据步进电机产品目录上的重要参数特性来选择,通常主要有以下参数(关于步进电机主要参数的说明请参考步进电机相关资料):①步进角;②矩角特性;③最大静止转矩;④最大启动转矩;⑤保持转矩;⑥最大启动频率和启动时的惯频特性;⑦矩频特性;⑧最大连续响应频率。
根据车钟机械结构的设计,从步进电机的步进角,系统所能允许的最小位移误差,步进电机各转矩指标,步进电机运行频率等方面综合考虑,选定北京信达恒科贸有限公司的AM2224型号步进电机并加配28∶1的行星齿减速箱。

图1 车钟系统硬件原理框图
3 系统特点及控制技术分析
3.1 系统原理
车钟系统的硬件原理如图1所示。系统中MCU控制模块通过系统总线与I/O模块相连,实现按键输入、OLED屏幕显示、蜂鸣器报警等功能。MCU控制模块通过检测电位器输出值确定自身挡位,并对照CAN网络接收到的目标车钟挡位数据信息,在满足相应条件时控制步进电机转动相应的步数,令本车钟挡位与目标车钟挡位相同,实现挡位随动功能。
步进电机驱动器的输入信号共有2路,分别是:步进脉冲信号 CP;方向电平信号 DIR。2路信号均由MCU的GPIO控制CD4050缓冲器IC的两输出引脚实现,MCU只需按所需工作频率向驱动器发出步进脉冲信号,即可以控制步进电机按照工作频率工作。当方向电平信号为高电平时,步进电机顺时针旋转;当方向电平信号为低电平时,步进电机逆时针旋转。
3.2 系统特点
在这种控制简单而又要求成本低的运动控制系统中,步进电机最大的优势是:可以开环方式控制而不需反馈就能对位置和速度进行控制,但也正是因为负载位置对控制电路没有反馈,步进电机就必须正确响应每次脉冲命令[5]。图2为所选步进电机的矩频特性曲线,可以看出其特性较软,电磁转矩随输入控制脉冲频率的增加而减小,在速度较高或加速度较大时,步进电机在脉冲转换时很容易引起丢步或过冲,使得步进电机的动态性能变差,这样所控制的机械部件运动精度就很低。因此,步进电机开环控制系统中,如何防止丢步和过冲是开环控制系统能否正常运行的关键。丢步和过冲现象分别出现在步进电机启动和停止的时候。
车钟的挡位随动中,极限状态是MAX.AH挡位与MAX.AS挡位之间的跨越。为提高系统在某些应急操作情况下(如紧急换向)的快速响应,极限情况下,随动过程须在4 s内完成,步进电机连续运行转速需达到450 r/min。为了保证步进电机稳定达到连续转速而不丢步,启动时必须使步进电机的输出力矩大于负载转矩,同时要保证步进脉冲一定的宽度,频率不能太高;同样,在到达预定位置时,若立即停止发送脉冲,令其立即停止,由于车钟手柄、齿轮组等机械设备的惯性作用,电机转子会转过平衡位置产生过冲。因此,为了避免丢步和过冲现象,步进电机升降速曲线的设计就尤其重要。将步进电机的矩频特性曲线近似为如图3所示递减曲线[3]。由该曲线得
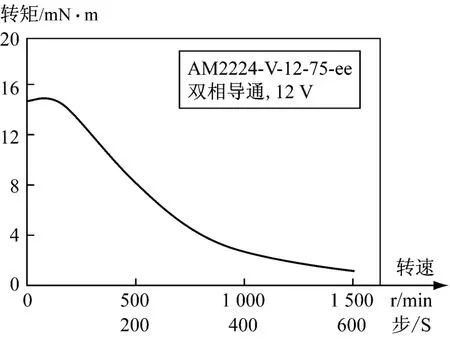
图2 步进电机矩频特性曲线

图3 步进电机矩频特性近似曲线
3.3 升降速曲线的设计分析

式中:Te为步进电机工作在频率f时的电磁转矩;Ts为步进电机起动转矩;f c为步进电机最高运行频率;Tc为频率fc时对应的电磁转矩。
步进电机的运动学方程为

式(2)中,Tl、ωr、J、Pn分别为步进电机的负载阻力矩、机械角速度、轴联转动惯量、绕组级对数。将式(1)代入式(2)中得
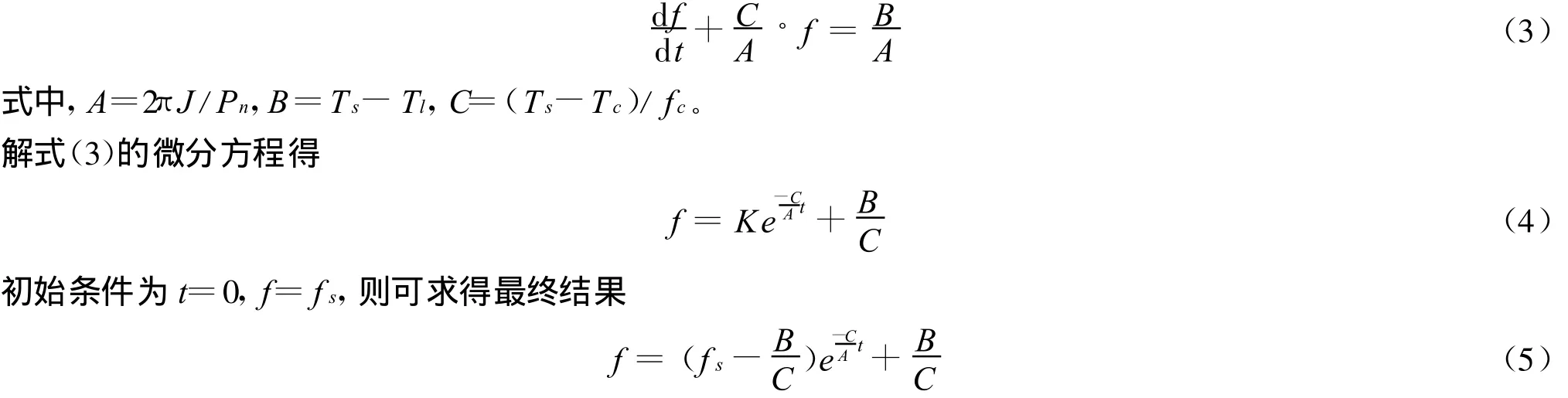
由式(5)可看出,理想的升速曲线为指数曲线,如图4所示。图中,f s,f c分别为启动时的跳变频率和连续运行频率;t1为启动时的升速时间;t2到t3为停止过程的减速时间。由于通过程序编制这样的曲线较为困难,所以在利用MCU控制步进电机的时候,一般通过各种方法拟合升降速曲线。升速曲线拟合常用的方法有以下3种。
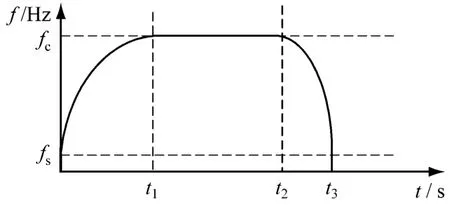
图4 步进电机升降速曲线图
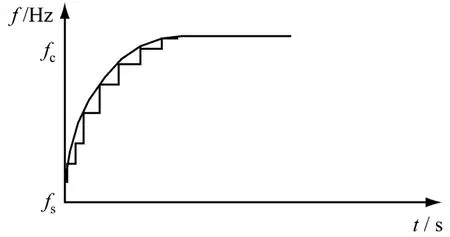
图5 升速曲线台阶拟合法原理图
3.3.1 台阶拟合法
台阶拟合的原理如图5所示。方法是通过多段的频率跳跃逐渐达到比较高的频率。这种方法程序设计简单,但是拟合稍粗糙,拟合效率低,适合对加速时间要求不苛刻、负载力矩较小、升降速不频繁且工作频率较低的步进电机[4]。升速过程中,刚开始频率跳跃可以比较大,每一个频率段持续时间较短。随着频率的升高,频率跳跃逐渐减小,每一个频率段持续时间逐渐延长,直至频率升至工作频率。
3.3.2 直线拟合法
直线拟合的原理如图6所示。它的方法是通过几段直线的频率变化来拟合升速曲线。这种方法在程序设计上相对复杂,占用系统资源较多,拟合精确,拟合效率较高,适合负载力矩要求高、对升速时间要求短的系统[4]。在升速过程中,开始升速时,升速直线斜率较大、持续时间较短、频率变化较大。随着频率的升高,升速直线的斜率逐渐减小、持续时间加长、频率变化减小,直至升速到工作频率。

图6 升速曲线直线拟合法原理图

图7 升速曲线查表拟合法原理图
3.3.3 查表法
查表法是一种拟合精度很高的升速曲线拟合方法,如图7所示。在编制程序之前,需要对步进电机进行大量的试验和比较记录。利用多条直线对升速曲线进行精确拟合,并且根据步进电机的最终工作频率,升降速时间长短和工作力矩的要求编制出多条不同的升速曲线[4]。在使用步进电机时根据不同的工作条件由程序或者硬件控制来选择使用不同的升速曲线。这种方法能够精确地拟合步进电机的升速曲线,最大程度发挥步进电机的性能,但是编制程序比较复杂,占用系统资源多,适合在步进电机的工作条件经常变化的场合下使用。
在步进电机降速曲线的设计时,也同样有这些方法。由于在步进电机降速过程中,步进电机力矩增大,所以对步进电机降速曲线的要求比升速曲线低一些,降速过程和升速过程并不对称。在降速过程中,只要保证电机不超步即可,步进脉冲频率下降的斜率可大些。以上几种方法相比较,台阶拟合比较简单,也比较容易做到步进电机在短时间内降速。在使用台阶法编制降速曲线时,频率跳跃可以比升速曲线大很多,一般可以是升速曲线频率跳跃的2倍。
考虑到车钟随动功能对速度要求的特点与MCU控制模块的资源限制,步进电机控制升降速曲线的设计就使用台阶拟合方法。

图8 升降速曲线台阶拟合软件流程图
4 实现方法
升降速曲线的台阶拟合的实现是通过控制因特尔80C196KC微控制器产生的脉冲频率的阶跃变化来实现,脉冲产生的精度由硬件定时器控制,脉冲频率的改变是通过改变定时常数实现的。通过对本车钟系统的计算与多次测试,升速阶段采用5台阶的拟合方式,升速过程中未出现丢步现象,效果较好。各阶段的频率分别为40 Hz,100 Hz,140 Hz,170 Hz,180 Hz,对应时间分别为50 ms,100 ms,200 ms,300 ms,加速总时间为650 ms,180 Hz为稳定运行频率。
降速曲线的实现原理与升速曲线相同,台阶较少,频率跳跃较大,即软件中时间常数的变化更大,降速曲线选用100 Hz,40 Hz两跳变频率,持续时间分别为200 ms,100 ms,降速过程中无过冲现象,效果较好。实现升降速曲线台阶拟合软件流程如图8所示。
5 结 语
本文根据车钟随动特点说明了选用步进电机作为执行元件的原因与优点,在分析步进电机加减速控制规律、实际系统需求基础上,结合步进电机的矩频特性,分析利用指数曲线拟合的各种方法的优缺点,实现了台阶拟合指数曲线的方法。实验证明,该方法在车钟随动过程中表现较好,达到了设计要求,具有一定的理论意义及工程应用参考价值。
[1] 梅晓榕.自动控制元件及线路[M].黑龙江:哈尔滨工业大学出版社,2001.149-150.
[2] 李俊,李学全,胡德金.步进电机的运动控制系统及其应用[J].微特电机,2000(2):37-38.
[3] 李立凯,林青松,杨宁.步进电机在光电跟踪照射系统中的优化控制[J].单片机与嵌入式系统应用,2009(2):54-55.
[4] 高亮.8051单片机对步进电机的控制及步进电机升降速曲线控制[J].测控技术,2002,21(11):64-65.
[5] 喻江波.反直升机智能雷达随动系统的研究[D].南京理工大学硕士论文.2004.
猜你喜欢
火炸药学报(2021年5期)2021-12-06
上海人大月刊(2020年12期)2020-12-30
中国新闻周刊(2019年9期)2019-04-29
劳动保护(2018年5期)2018-06-05
汽车维修技师(2017年6期)2017-11-18
数学大王·低年级(2017年9期)2017-09-18
科技视界(2017年5期)2017-06-30
试题与研究·中考物理(2014年3期)2015-05-11
小说月刊(2015年11期)2015-04-23
汽车维修与保养(2015年2期)2015-04-17
