
GPS技术在双台子河航道测量中的应用
2010-11-09 06:37张海青
河北水利电力学院学报 2010年4期
张海青
(黄骅市水务局,河北 黄骅 061100)
某大型物流项目中拟将运载重达 800 t和560 t的两个大型构件的驳船通过拖轮自辽宁省双台子河河口分两次牵引至卸货码头,航道全长 62 km。由于双台子河为非航运潮汐河道,历史上无较大型船舶航行记录,加之该河道多弯曲段和浅滩,沿途还有 3座桥梁,航行难度很大。为寻找到安全航线,须对河道进行水下地形测量及对 5处转弯半径在 100~300 m的河段进行 1∶1000地形图测量。
双台子河位于盘锦市西南部,两岸苇田绵延数百公里,号称“世界最大苇海”,人烟相对稀少,河道两岸多沟壑、沼泽,交通极为不便,通行困难。用传统的测量方法在短时间内完成任务难度极大。为此,选择以 GPS为主要施测手段,在较短的时间内圆满完成了航道测量任务,确定了安全航线,为大型构件运输方案的实施提供了保障。
1 GPS的相对定位原理[1][2]
GPS相对定位也叫差分 GPS定位,是目前 GPS定位中精度最高的一种。相对定位的最基本情况,是两台 GPS接收机,分别安置在基线的两端,并同步观测相同的 GPS卫星,以确定基线端点在协议地球坐标系中的相对位置或基线向量。这种方法,一般可以推广到多台接收机安置在若干基线的端点,通过同步观测GPS卫星,以确定多条基线向量的情况。
根据用户接收机在定位过程中所处的状态不同,相对定位有静态和动态之分。
1.1 静态相对定位
静态相对定位就是安置在基线端点的接收机固定不动,通过连续观测,取得充分的多余观测数据,以改善定位精度。
静态相对定位,一般采用载波相位观测值(或测相伪距)为基本观测量。这一定位方法是当前 GPS定位中精度最高的一种方法,在精度要求较高的测量工作中,均采用这种方法。在载波相位观测的数据处理中,为了可靠地确定载波相位的整周未知数,静态相对定位一般需要较长的观测时间(1~3 h不等)。此种方法一般也被称为经典静态相对定位法。
1.2 动态相对定位
动态相对定位是用一台接收机安置在基准站上固定不动,另一台接收机安置在运动载体上,两台接收机同步观测相同卫星,以确定运动点相对基准站的实时位置。
动态相对定位根据采用的观测量不同,分为以测码伪距为观测量的动态相对定位和以测相伪距为观测量的动态相对定位。
RTK定位技术就是基于载波相位观测值(Real-time kinematic)的实时动态定位技术,它能够实时地提供测站点在指定坐标系中的三维定位结果,并达到厘米级精度。在 RTK作业模式下,基准站通过数据链将其观测值和测站坐标信息一起传送给流动站。流动站不仅通过数据链接收来自基准站的数据,还要采集GPS观测数据,并在系统内组成差分观测值进行实时处理,同时给出厘米级定位结果,历时为1~3 s。
2 GPS技术在双台子河航道测量中的应用
在双台子河航道测量中,GPS测量采用广播星历时,其相应坐标系为世界大地坐标系 WGS84,然后在1954年北京坐标系进行约束平差。图根 RTK测量、地形图测量、横断面基点测量均在 1954年北京坐标系下施测。四等水准测量采用 85黄海高程基准。
2.1 测量方法
2.1.1 平面控制网确定
首先根据已知的 GPS控制点建立 D级平面控制网。实测中根据需要在 63 km的河道沿线共埋设标石 9座,已知的 GPS点的高程复合按四等水准测量通过传统手段完成。加密 D级 GPS控制网测量的外业观测采取静态测量,采用 5台套 Trimble GPS接收机进行观测,其基本图形为大地五边形,图形之间采用边连接,测得 9座标石的平面位置和高程。
2.1.2 平面控制测量
根据任务要求,需进行 5处弯道的水下地形测量和沿线 63 km河道水下纵横断测量以及 5座桥梁梁底高程测量,以寻找到安全航线。因此,平面控制测量分为水上和水下两部分进行。
1)水上部分。首先将 GPS接收机安置在测区内适当位置的标石上作为基准站,在基准站的控制精度范围内,由人员手持流动站,按所设计的测量断面逐点测量,当测点数据精度达到 GPS仪器预设的精度时,保存当前的测量数据。实测中,为加快测量进度,采用了 GPS和全站仪测量相结合的方法。
2)水下部分。水下部分的测量是此次测量的重点,航线的正确与否关系到船只的航行安全及造价上亿元的设备安全。实测中,用 2台套 Trimble5800+与测深仪相互配合进行测量。首先将测深仪与 GPS固定在测量船相同的位置,测量人员按设计的测量断面测量,GPS测得平面位置和水面高程,同时测深仪测得水深。则河底高程=水面高程-水深。
2.2 测量数据处理
外业取得的数据直接存储在 GPS手簿中,GPS网基线解算采用 Trimble公司随机配备的软件— Trimble Geomatics Office Ver1.63(TGO)软件。基线解算前,按《规范》、《技术设计书》和《检验规定》及时对全部资料进行全面检查,确保作业成果符合作业调度命令和《规范》要求,观测数据、质量分析合理,然后在WGS84系统下进行基线处理。
2.3 测量精度及误差分析

表1 基线向量解算精度表 m
基线向量解算形式:高度角限制 15°,采用广播星历,其解算类型为双差固定解。其质量控制见表 1。
基线长度精度用标准差表示:

式中,e为标准差,mm;d为平均相邻点间距离,取 7×106m;a为接收机固定误差,a=10 mm;b为接收机比例误差系数,b=5。
经计算,e=36 mm。
重测基线的长度较差 Ds,两两比较满足下式规定:
重复基线的长度较差比较见表2。全网共有重复基线 2条,重复基线差值均小于限差要求,GPS基线精度不存在系统误差,满足规范要求。
为进一步检查 GPS网中各观测量的质量,用闭合差检验公式对全网进行 4结点闭合差检验,GPS网观测精度均满足《GPS测量规范》要求,见表3。
GPS网平差采用随机配备的商用软件— TGOffice,由于网的基线长度相差较大,平差时选择应用到各观测值的加权策略。GPS网无约束平差和约束平差最弱边相对精度及点位精度均满足设计指标要求。

表2 重复基线的长度较差比较
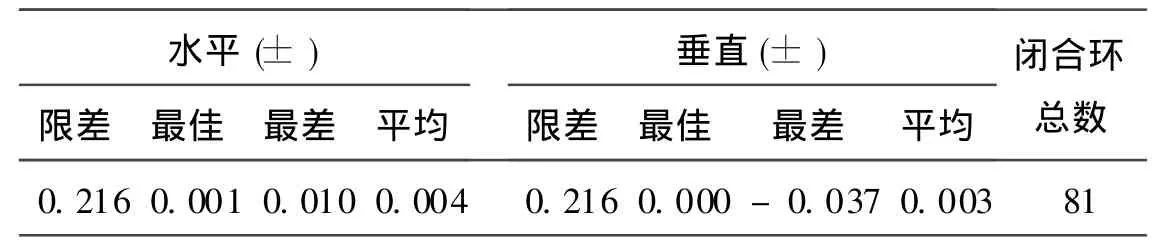
表3 闭合环精度统计
3 GPS技术的优点和局限性
3.1 GPS技术的优点
通过在双台子河使用 GPS技术进行航道测量,可以发现该技术有如下优点。
1)观测站之间无需通视。既要保持良好的通视条件,又要保障测量控制网的良好结构,这一直是传统测量技术在实践方面的困难问题之一。 GPS测量不要求观测站之间相互通视,这一优点即可大大减少测量工作的经费和时间,同时也使点位的选择变得更加灵活。
2)定位精度高,没有误差积累。只要满足 GPS的基本工作条件,在一定的作业半径范围内,GPS可同时精确测定测点的三维坐标,高程测量精度可满足四等水准要求,且没有累积误差。实测中,基准站架设在视野开阔且附近无高大建筑物的控制点上,作业半径约为8~10 km。
3)观测时间短。进行 GPS测量时,将基站架设在已知控制点上,测量人员手持流动站,利用 RTK技术每点定位历时仅几秒钟,速度很快。
4)操作简便。 GPS测量的自动化程度很高,在观测中,测量员的主要任务只是安装并开关仪器、量取仪器高、监控仪器的工作状态和采集环境的气象数据,而其他观测工作,如卫星的捕获、跟踪观测和记录等均有仪器自动完成。
5)全天候作业。GPS观测工作,可以在任何地点、任何时间连续地进行,一般也不受天气状况的影响,风雨天均可实施。
3.2 GPS技术的局限性
外部环境对 GPS的使用及精度会有一定的影响,如近距离的高压线路、建筑物、高大树木、河道上的桥梁都会影响 GPS接收效果,因此在测量时应尽量避开这些障碍物。当卫星信号无法接收时,需通过全站仪、水准仪完成附近的测量任务。目前随着 GPS技术的升级换代,上述因素对测量的影响大大减轻,如目前许多GPS还可以接收俄罗斯的 Glonass卫星信号,大大提高了设备的卫星信号跟踪性能。
4 结语
运用 GPS测量技术,仅用 15天的时间就顺利完成了双台子河航道测量工作,测得了关键河段的水下地形图,取得了准确的河道深泓线坐标,为船只安全航行打下了良好的基础。又通过进行潮汐水文观测,摸清了双台子河的潮汐运动规律,制定了完善的航行和停泊方案,最后圆满完成了拖航任务。
[1]胡悟生,高成发.GPS测量原理及其应用 [M].北京:人民交通出版社,2002.
[2]南方测绘仪器有限公司.GPS定位原理及应用[Z],2005.
[3]SL197-97,水利水电工程测量规范 (规划设计阶段)[S].
[4]SL58-93,水文普通测量规范[S].
猜你喜欢
当代陕西(2020年23期)2021-01-07
科学(2020年5期)2020-11-26
中国惯性技术学报(2019年3期)2019-10-15
测控技术(2018年6期)2018-11-25
电子制作(2018年19期)2018-11-14
舰船电子对抗(2016年5期)2016-12-13
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24
安徽地质(2016年4期)2016-02-27
全球定位系统(2015年4期)2015-02-28
