
吊篮式移栽机双工位喂苗机构的设计
2010-10-28 06:21:58刘洋李亚雄赵华伟王涛李斌
石河子大学学报(自然科学版) 2010年5期
刘洋,李亚雄,赵华伟,王涛,李斌
(1新疆农垦科学院机械装备研究所,石河子832000;2石河子大学机械电气工程学院,石河子832003)
吊篮式移栽机双工位喂苗机构的设计
刘洋1,李亚雄1,赵华伟2,王涛1,李斌1
(1新疆农垦科学院机械装备研究所,石河子832000;2石河子大学机械电气工程学院,石河子832003)
吊篮式移栽机具有成穴和移栽一次完成的特点,但是在使用时喂苗人员劳动强度较大,且易出现漏苗现象。为了解决此问题,设计了一种吊篮式移栽机双工位喂苗机构。该机构采用栽植单体上的挡铁推动拨杆,由与之铰接的拉杆打开喂苗筒上的活门实现向吊篮喂苗;通过计算确定了该机喂苗筒的高度,优化了喂苗的位置和提前角。
吊篮式移栽机;喂苗机构;提前角
Abstract:The feature of the bastkate-type transplanter is that it can complete cransplating and caving one time,but the labor intensity is great when it works.Considering this defect,a machinery about bastkatetype transplanter was designed.In this machinery,the iron block of planting monomer is used to push the lever,and the bar which is hinged with it,open the valve of picking seedling tube,thus the planter was thrown in the bastkate.The height of the planting tube is designed based on analyzing,and the position and advanced angle were optimized based on calculating,which can reduce the damage of planter by the bastkate and improve the accuracy of planting.
Key words:transplanter;picking seedling machinery;advance angle of picking seedling;bastkate
20世纪30年代国外发达国家出现了手工喂苗的栽植机具,50年代研制出多种不同结构形式的半自动移栽机和简易制钵机。70年代末B K Huang等发明了适合自动移栽的空气整根育苗技术,以此为基础提出了钵体移栽的系统方案,并设计了精密苗盘播种机和自动移栽机。这种移栽机能够移栽多种农作物,通用性好,缺点是体积大,成本高[1]。80年代初美国出现了自动移栽机,H L Brewer等[2]经过多年研究、改进、设计出箱式移栽机。目前,一些发达的国家已实现甜菜、玉米、蔬菜和烟草等旱地作物的育苗工厂化和移栽机械化。
我国在20世纪70年代开始研制裸根苗移栽机,80年代研制成半自动蔬菜移栽机,但是由于育苗技术落后,配套性能差,综合效益低等原因都未得到推广。2009年4月,新疆天业集团从意大利Ferrari公司引进一台吊篮式移栽机,该机移栽质量好,可以方便地调节行距和株距,在使用过程中得到了农机工人的好评。据农机工人反映,该机喂苗不方便,受喂苗人员工作频率的影响,工作时机组车行走速度较慢,移栽效率低;若机车提高作业速度,吊篮转速将提高,容易造成喂苗人员喂苗不及时,漏苗率提高,并使喂苗人员劳动强度得到极大的提升。因此,为了提高吊篮式移栽机的作业效率和移栽质量,在吊篮式移栽机投苗理论的基础上设计了一种喂苗机构。
1 喂苗机构的结构与原理
吊篮式移栽机喂苗与栽植结构如图1所示。图1中箭头方向是栽植单体转动方向,喂苗机构通过机架固定在移栽单体的上方。喂苗机构主要有喂苗筒、活门、拉杆、拨杆、滚动轴承和弹簧组成,活门与喂苗筒和拉杆分别铰接,拉杆一端有一根弹簧,不工作时,在弹簧力作用下活门关闭喂苗筒。拨杆的下端安装一个轴承,拨杆和拉杆之间连接一根弹簧,在弹簧力的作用下使拨杆与拉杆上的轴承始终接触。
喂苗前,活门处于关闭状态,由人工将钵苗放入喂苗筒中,挡铁随着移栽单体的转动与拨杆下端的轴承接触,并推动拨杆,拨杆推动拉杆,拉杆打开活门,放在喂苗筒中的钵苗落入栽植单体的吊篮中,这样就完成了喂苗工作,此时活门处于打开状态。
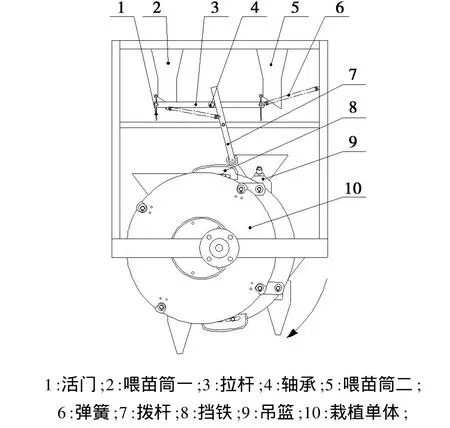
图1 喂苗和栽植机构Fig.1 The mechanism of feed-seeding and transplanting
2 关键部件的设计与计算
2.1 喂苗筒结构
喂苗筒下端斜口(图1)的角度对喂苗的可靠性有一定的影响。角度过小时,活门关闭太快,容易夹苗;角度过大时,活门打开时间较长,这样人工将钵苗放入投苗筒的有效时间太短。另外,在能够满足人工投苗所需要时间的情况下,应尽量取较大的倾斜角,以避免夹苗现象的产生。鉴于以上作业要求,本设计喂苗筒斜口的角度取为45°。
2.2 吊篮结构
因为喂苗机构投下的钵苗在下落的过程中,栽植单体上的吊篮在转动,为了使喂苗机构投落的钵苗能够准确落入吊篮中,本设计对吊篮的结构进行了改进,即在吊篮的上端安装一个苗盒,其结构如图1所示,这样只要钵苗落入苗盒中,就保证了投苗的准确性。
2.3 喂苗位置的确定[3-5]
2.3.1 喂苗筒高度的确定
喂苗筒的高度直接影响喂苗的准确率及可靠性。喂苗筒过高时,钵苗从喂苗筒活门打开到落入吊篮苗盒中的时间较长,这会降低喂苗的准确率;若喂苗筒较低,则挡铁推动拨杆打开活门的时间较短,会出现钵苗还未完全掉出喂苗筒而活门就已经关闭的情况,这样就发生了夹苗的现象。为了避免这种现象,可以增加挡铁的长度来延长活门打开时间,同时尽量取较低的喂苗筒高度。
钵苗的高度一般在15~20 cm,为了避免夹苗现象,喂苗时钵苗应全部掉出喂苗筒后活门才关闭。
因此,本设计喂苗筒的高度取为钵苗最大高度20 cm。
2.3.2 吊篮接苗瞬时位置的确定
参照文献[6-7]确定吊篮接苗的瞬时位置。
在钵苗下落的过程中,为了减小钵苗落入吊篮时的损伤,就必须使钵苗受到的横向冲击力最小。图2是钵苗下落示意图,VT是移栽机工作行驶速度,因为喂苗筒和栽植单体的速度VT相等,所以钵苗在被投落时与栽植单体的速度VT也相等。钵苗质心 M 在下落过程中只受到重力作用,所以速度VM方向垂直向下。吊篮A、B的速度为VA、VB,因为吊篮在移栽单体上均布,所以VA与VB的大小相等。为了减小钵苗落入苗盒时的损伤,应使吊篮A、B在水平方向的分速度同时取较小值时刻,钵苗落入苗盒。
根据速度矢量分解得:

上式中 , 00≤θ≤900。
由上面二式可以看出,吊篮A的水平速度与θ的正弦成反比,吊篮B的水平速度与θ的余弦成反比。因此,为了使吊篮A、B的苗盒在接到钵苗时水平速度都为较小值,只有取θ=45°,即当吊篮A、B的轴在移栽单体转轴上方高度相等时接苗,钵苗的损伤较小。
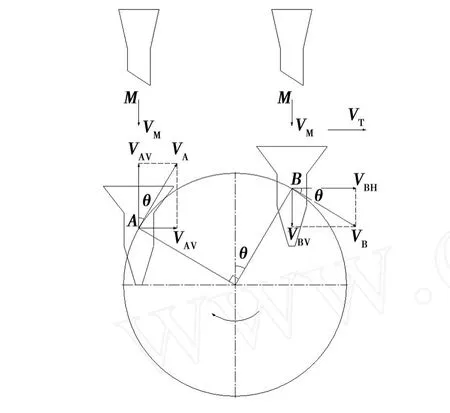
图2 钵苗下落示意Fig.2 The picture of the seed-droping
2.3.3 喂苗提前角的计算
参照文献[8-10]计算喂苗提前角。
喂苗时,钵苗从喂苗筒的活门打开到落入吊篮的过程中,吊篮绕旋转轴转过的角度就是喂苗提前角。钵苗落下的准确性除与喂苗筒到吊篮的距离有关,还与吊篮在工作时的运动角速度有关,而角速度受移栽机工作行驶速度的影响,所以喂苗提前角是下落高度与移栽机工作行驶速度的函数。
喂苗时,喂苗筒距处于接苗状态的吊篮苗盒垂直距离 h =0.2 m。因为钵苗与吊篮的速度VT相等,所以在计算钵苗相对于吊篮的下落时间时,可以忽略移栽机工作行驶速度VT的影响。根据 t =钵苗下落时间t=0.2 s。
移栽机工作时,每分钟栽苗约80株,一次可以同时给2个吊篮喂苗,吊篮转一圈喂苗4株,即栽苗单体每分钟转数n=20。根据角速度公式ω=得吊篮旋转的角速度ω=2.1 r/s。这样,可以计算得喂苗提前角φ=ωt,从而φ=0.42 r,换算得φ≈24°。
3 结语
1)吊篮式移栽机双工位喂苗机构是在现有打穴式移栽机的移栽理论基础上设计的,该机构通过固定在栽植单体上的挡铁推动拨杆使喂苗筒上的活门打开,从而完成喂苗工作,可以同时给2个吊篮喂苗。通过改进吊篮结构,保证了喂苗的准确性。
2)通过分析吊篮的运动规律,确定了喂苗筒的高度为20cm时较为理想,并计算优化了吊篮接苗较为合理的位置,即θ=45°时,对钵苗的损伤较小。由于喂苗筒从投下钵苗到落入吊篮苗盒存在时间差,通过计算得到了最佳的喂苗提前角φ≈24°。
[1]李其昀.机械化育苗移栽的现状和展望[J].农机化研究,2006(3):26-27.
[2]刘磊,陈永成,毕新胜,等.吊篮式移栽机栽植器运动参数的研究[J].石河子大学学报:自然科学版,2008,26(4):504-506.
[3]安凤平,龚丽农.2YZ-40型吊篮式钵苗栽植机的研究[J].现代化农业,1999(2):18-22.
[4]孙裕晶,马成林,左春柽.组合振动导苗筒式导苗机构试验研究[J].农业机械学报,2001,32(6):30-33.
[5]宋洪波,安凤平,史岩.偏心式移栽机的研究[J].农业机械学报,1997,28(增刊):41-45.
[6]封俊,秦贵,宋卫堂,等.移栽机的吊杯运动分析与设计准则[J].农业机械学报,2002,33(5):48-50.
[7]封俊,顾世康,曾爱军,等.栽植机的性能评价指标与检测方法[J].农业工程学报,1998,14(2):73-77.
[8]哈尔滨工业大学理论力学教研室.理论力学[M].北京:高等教育出版社,2002.
[9]李宝筏.农业机械学[M].北京:中国农业出版社,2003.
[10]周德义,孙裕晶,马成林.移栽机凸轮摆杆式扶苗机构设计与分析[J].农业机械学报,2003,34(5):57-60.
A Design of Duplex Working Positioned Picking Seedling Machinery of Bastkate-type Transplanter
LIU Yang1,LI Yaxiong1,ZHAO Huawei2,WANG Tao1,LI Bin1
(1 Mechanical Equipment Research Institute,Xinjiang Academy of Agricultural and Reclamation Sciences,Shihezi,832000,China;2 College of Mechanical and Electrical Engineering,Shihezi University,Shihezi 832003,China)
S223.94
A
1007-7383(2010)05-0628-03
2010-08-19
国家科技支撑计划项目(2007BAD44B04)
刘洋(1978-),助理研究员,从事农业机械设计及应用研究;e-mail:lyshz@yahoo.com.cn。
猜你喜欢
运输经理世界(2021年2期)2021-03-06 11:56:53
林业科技(2020年3期)2021-01-21 08:28:38
江西农业大学学报(2020年6期)2021-01-08 02:35:38
科技风(2020年13期)2020-05-03 13:44:08
液压与气动(2019年9期)2019-09-17 11:26:26
农机化研究(2019年7期)2019-05-24 09:48:24
四川水泥(2019年7期)2019-02-17 13:09:22
农业工程学报(2018年9期)2018-06-01 08:46:00
中小企业管理与科技(2018年23期)2018-02-07 08:08:14
电气开关(2016年3期)2016-12-29 08:38:06
