Fuzzy-Smith 控制器在烧结制粒湿度控制中的研究
2010-10-22 06:59王宏文朱桂梅吴玲玲蒋君杰
河北工业大学学报 2010年5期
王宏文,朱桂梅,吴玲玲,蒋君杰
(河北工业大学 电气与自动化学院,天津 300130)
0 前言
烧结制粒湿度控制,是烧结生产比较重要的环节,不仅直接影响烧结过程的垂直速度,而且影响烧结矿的成品率、生产率和转鼓指数.制粒圆筒的加水到测知出料湿度中间存在着较大的纯滞后.制粒湿度控制系统的控制原理是:首先由水份检测仪检测到出料湿度信号,在控制器内此信号与设定值进行比较,经过相关的控制运算后输出信号给阀门,通过调整阀门的开口度来控制水流量,从而达到对湿度进行控制的目的.混合料及水在混合器中混合,一般须经3~5min后才能从混合器中排出进入运输皮带,水分的检测一般在混合后的运输皮带上[1];因此,当混合料流量及加水量改变后,需3~5min后才能检测到水分的变化,如此大的纯滞后时间,使得传统的控制法在烧结制粒湿度控制中一直不理想,影响混合料的造球和台车的透气性,从而影响烧结产品的质量并最终影响到高炉炼铁的产品质量.
普通的Smith预估控制在定常滞后系统能够获得很好的控制效果,但需要被控对象的精确数学模型.本文针对烧结制粒湿度控制工艺特点,引入模糊控制,将模糊控制和Smith控制相结合构成Fuzzy-Smith湿度控制器,充分利用模糊控制和Smith控制两者的优点.Fuzzy-Smith预估器的控制策略,能够有效地补偿烧结制粒湿度控制系统时滞,经MATLAB仿真验证,该方案具有较好的控制品质.
1 Smith预估器
在工业过程控制中,被控对象往往不同程度地存在着纯滞后环节.被控对象的纯滞后时间会对控制质量产生严重影响,如果滞后时间较长,则会使系统不稳定.在这种情况下,采用常规的Pl或PID控制器难以获得满意的控制性能,为了维持系统的平衡,控制器的参数必须整定得远远低于其最佳整定值,这使得闭环系统响应缓慢,无法迅速消除快速变化扰动的影响.史密斯提出的预估补偿控制方案,针对纯滞后系统闭环特征方程中含有的纯滞后项,在PID反馈控制基础上,引入一个预估补偿环节,从而使系统闭环特征方程中不含纯滞后项,提高了控制质量.
图1是典型的Smith预估控制系统原理框图.在传统有延迟单回路控制系统引入一个纯滞后补偿环节,即Smiht预估补偿器,与被控对象并联,补偿后被控对象的闭环传递函数不包括纯滞后项-s.实际上Smiht预估器并不并联在被控对象上,而是并联在调节器上,等效为带Smiht预估的调节器[2].
史密斯预估器控制的基本思路是,预先估计出过程在基本扰动下的动态特性,然后由预估器进行补偿控制,力图使被延迟了 的被调量提前反映到调节器,并使之动作,以此来减小超调量与加速调节过程.
该系统由3部分组成:1)被控对象;2)Smith预估控制器;3)控制器.分别见式 (1)、式 (2)、式 (3).
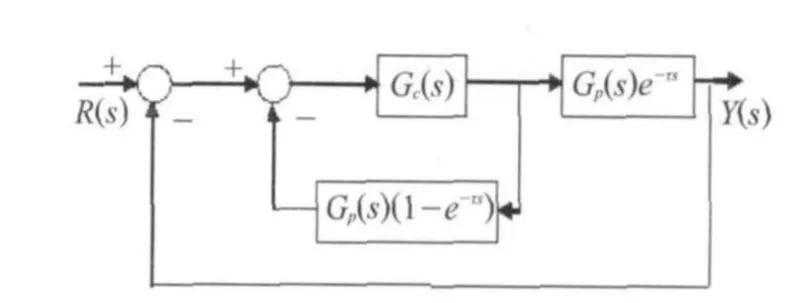
图1 Smith预估器控制原理图Fig.1 Theprinciplediagram of the Smith Controller
闭环特征方程为

2 大时滞系统的Fuzzy-Smith控制
Smith预估控制器能克服大滞后的影响,传统的Smith预估控制中的控制器是个PID控制器,由于PID控制是基于被控对象精确模型而设计,而实际中很难获得对象的精确数学模型.模糊控制器具有不依赖对象数学模型,对参数变化不敏感,鲁棒性强的特点,将模糊控制器引入到Smith预估控制系统,即将图1中控制器用模糊控制器取代,这就构成Fuzzy-Smith预估控制系统.
2.1 模糊控制器的设计
对于不同的被控对象,模糊控制具体的控制规则不尽相同,本文针对烧结混合料水分控制时滞现象提出了相应的模糊控制规则,同时结合一般二维模糊控制器的通用规则进行了模糊控制器的设计.
在MATLAB环境下键入Fuzzy命令进入模糊逻辑工具箱,通过具有交互式界面的模糊推理系统编辑器和隶属度函数编辑器设计输入输出变量和隶属函数形状.模糊控制器的输入变量有两个,即控制器以误差 和误差变化率 为输入量,控制量为输出量,输入变量 和 及输出量的模糊子集量化为7个等级,均为 {NB,NM,NS,ZO,PS,PM,PB},其中 和 的论域都为 {6, 5, 4, 3, 2, 1,0,1,2,3,4,5,6},的论域为 {7, 6, 5, 4,3, 2, 1,0,1,2,3,4,5,6,7}, 、 和的隶属函数图如图3和图4所示.隶属度函数均采用三角形隶属度函数.
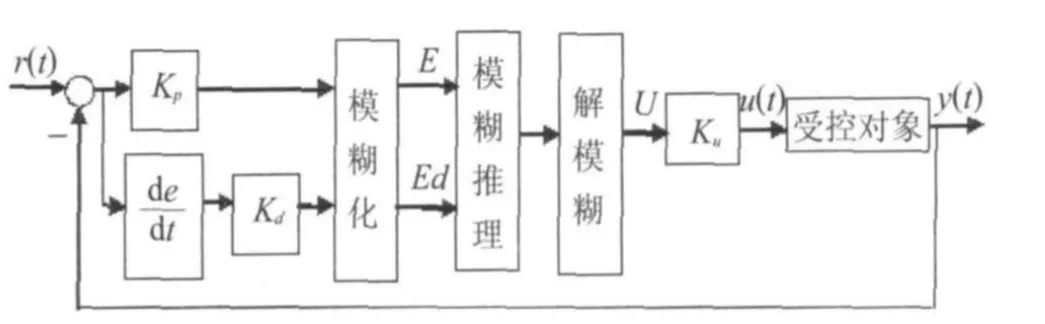
图2 模糊控制器控制框图Fig.2 Thediagram of the Fuzzy controller
2.2 模糊规则的指定
通过模糊规则库编辑器确定“if and,then”形式的模糊控制规则.本文中共有49条控制规则,生成的模糊控制规则见表1所示.
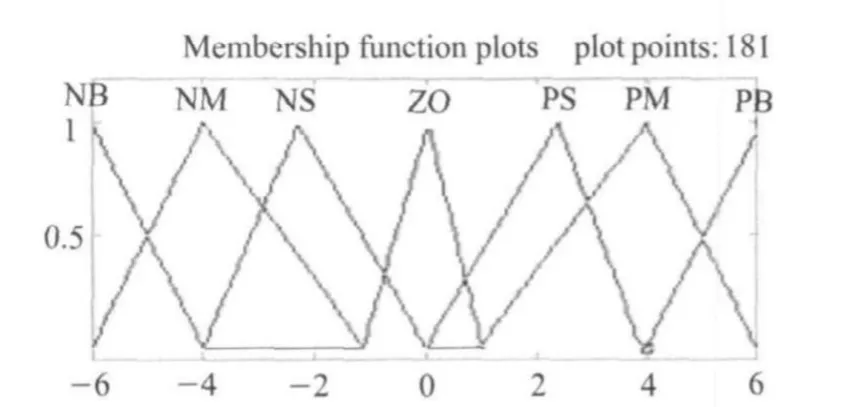
图3 输入变量 和 的隶属度函数图Fig.3 The Membership functionsof the Input variables and
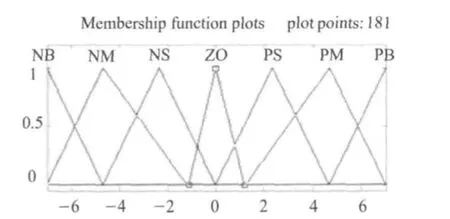
图4 输出变量 的隶属度函数图Fig.4 The Membership functionsof theoutput variables
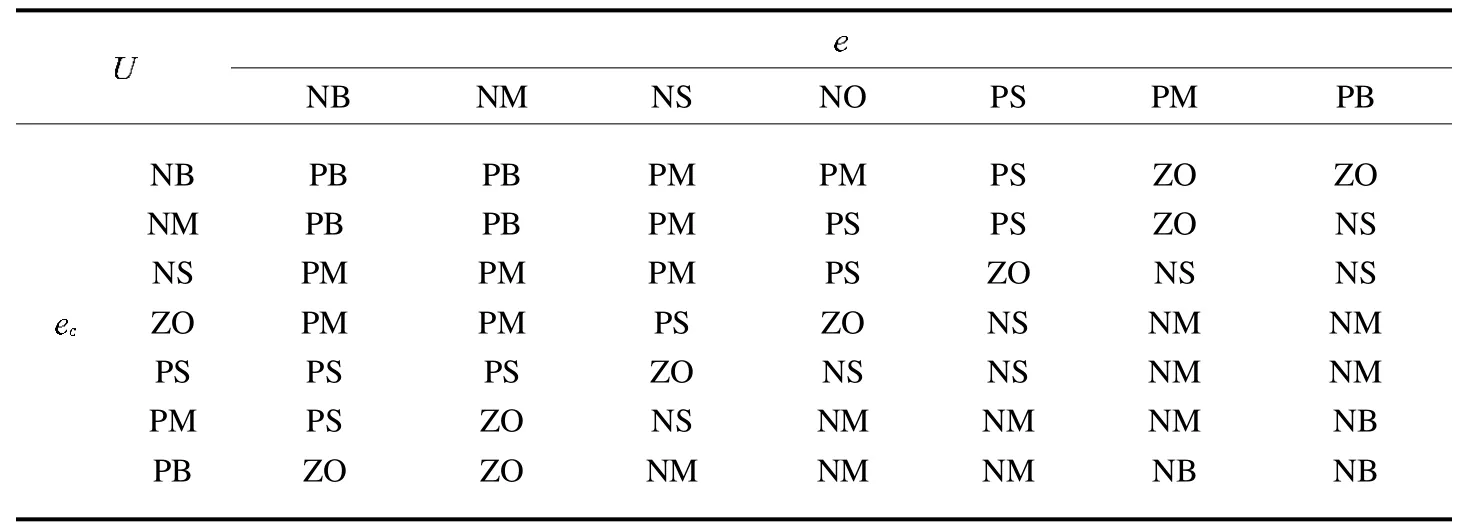
表1模糊控制规则表Tab.1 The rules diagram of fuzzy control
模糊规则确定后,即可进行模糊推理.对三角分布隶属度函数,同时考虑运算的简便和快速性,在本系统中采用mamdani推理法.首先根据以上总结出的模糊控制规则,确定并计算模糊关系,共49条.然后根据所求得的模糊关系,将输入的偏差和偏差变化率的模糊值矢量由合成推理的方法求解输出量的模糊值矢量.即可得出对应模糊控制器的输出控制量的模糊值矢量.
2.3 Fuzzy-Smith控制器
针对Smith预估控制和模糊控制的特点,应用Fuzzy-Smith预估控制器,实现对烧结制粒大时滞系统的较好控制,Fuzzy-Smith控制系统控制框图如图5.
模糊Smith控制器控制的基本原则是:当误差大或较大时,选择控制量以尽快消除误差为主;而当误差较小时选择控制量要注意防止超调,以系统的稳定性为主[5].
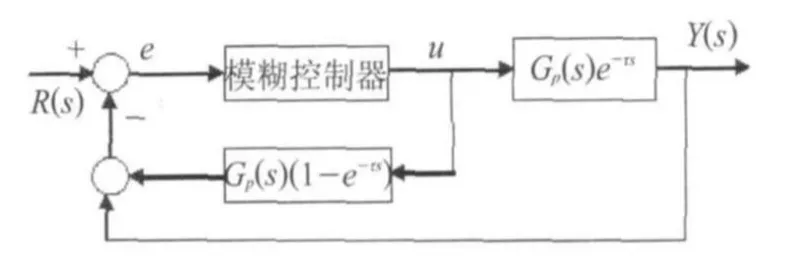
图5 Fuzzy-Smith控制系统控制框图Fig.5 Thestructureof thefuzzy-smith control system
3 Fuzzy-Smith控制系统仿真研究
根据烧结制粒湿度控制系统参数建立被控对象数学模型,传递函数为.从严格意义上讲,很难对此系统给出精确数学模型,常用的方法是用一阶惯性加纯滞后模型来拟合过程对象,因为一阶时滞模型对对象有很强的逼近能力,此传递函数是对烧结制粒湿度系统的近似拟合[6].
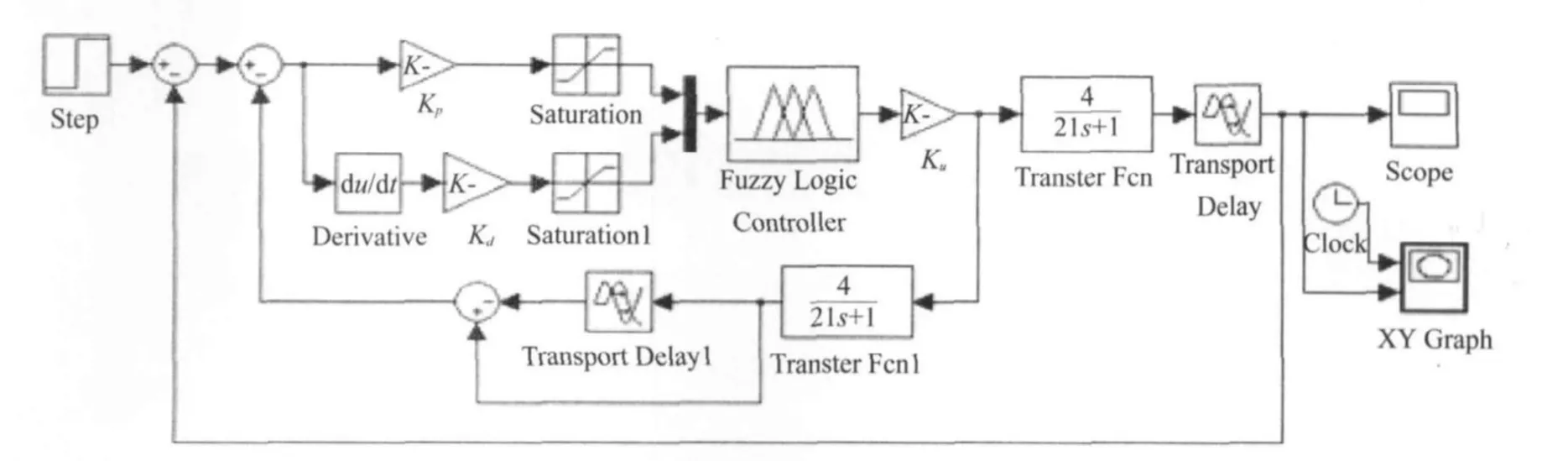
图6 Fuzzy-Smith控制器仿真模型Fig.6 Thesimulation model of the Fuzzy-Smith controller
使用Matlab下的Simulink仿真工具对本文采用Fuzzy-Smith控制方案进行仿真研究,仿真模型如图6.
对上述控制对象分别采用PID-Smith控制、Fuzzy-Smith控制进行仿真,得到的仿真曲线如图7~图8.
由图7~图8可知,Fuzzy-Smith控制器的仿真曲线同没有延迟PID仿真曲线延迟了一个时间 ,而控制品质没有下降.比较图7和图8仿真曲线可以发现,传统的PID-Smith控制存在超调,而Fuzzy-Smith控制减小了调节时间,并极大地降低了系统的超调量,系统稳态精度高,对烧结制粒湿度大时滞系统有良好的控制品质.
图8所示,由Fuzzy-Smith进行补偿控制后,使被延迟了的被调量提前反馈到调节器,并使之动作,以此来减小超调量使之成为单调上升的过程,可见Fuzzy-Smith的控制作用十分突出与明显.
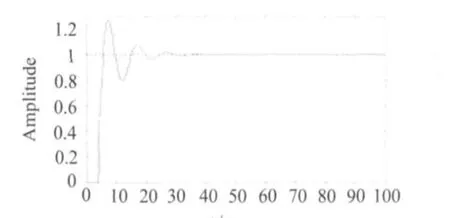
图7 PID-Smith控制曲线Fig.7 Thecontrol curveof PID-Smith
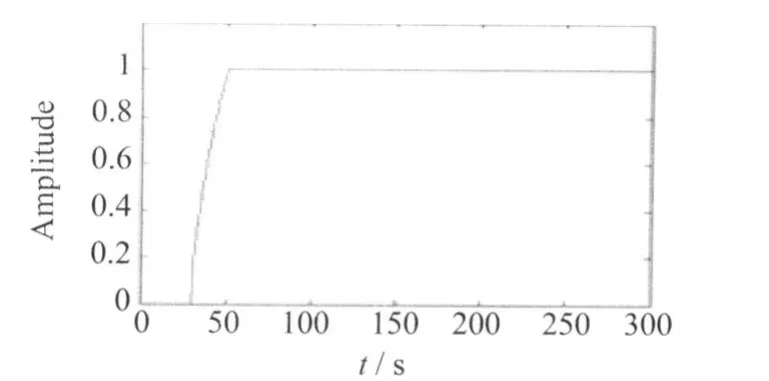
图8 Fuzzy-Smith控制曲线Fig.8 The Control curveof Fuzzy-Smith
4 结论
通过仿真研究,验证本文所应用的Fuzzy-Smith控制系统综合了模糊控制和Smith预估器的优点,不仅能够抑制时滞带来的不良影响,而且提高了系统的控制精度,简化了控制器的设计,增强了系统的鲁棒性.并对该控制策略和PID-Smith控制策略对大时滞系统的控制品质进行了仿真比较,最后得出Fuzzy-Smith控制策略对于时滞系统的控制可以收到良好的控制效果,基于Smith算法的模糊控制器在消除了纯滞后现象的影响的同时保持了系统的稳定性.对于克服烧结混合料水分控制系统的时滞具有明显的作用,可以明显改善烧结制粒湿度纯滞后系统的控制质量.
[1]马殿同.模糊控制在烧结混合加水上的应用 [J].冶金自动化,2008(S2):4-7.
[2]Tan W.Tuning of a modified Smith predictor for processes with time delay[J].Control Theory and Applications,2003,20(2):297-301.
[3]范锴光.基于MATLAB6.5的模糊Smith预估系统的仿真研究 [M].北京:中国水运出版社,2006.
[4]黄忠霖,周向明.控制系统Matlab计算机及仿真实训 [M].北京:国防出版社,2001.
[5]刘芬,申群太.制粒湿度模糊自整定PID串级控制 [J].电气传动,2006,36(10):37-39.
[6]张文杰,孙涛.Smith预估器的复合模糊控制的仿真研究 [J].山东轻工业学院学报,2009,23(1):84-86.
猜你喜欢
中南大学学报(自然科学版)(2022年8期)2022-09-21
数学物理学报(2020年5期)2020-11-26
环球时报(2020-08-11)2020-08-11
自动化学报(2019年6期)2019-07-23
中国饲料(2018年22期)2018-12-13
机电工程技术(2018年10期)2018-12-06
中成药(2018年4期)2018-04-26
科学与财富(2017年2期)2017-03-15
应用数学与计算数学学报(2014年3期)2014-09-26
东北石油大学学报(2012年4期)2012-03-20