
长基线高精度时间频率传递技术的综合应用*
2010-09-26 04:38
电讯技术 2010年8期
(中国西南电子技术研究所,成都 610036)
1 引 言
当今各种大型军、民用无线电通信网、卫星导航/陆基导航系统网络、电子侦察与雷达网、航天测控与深空探测网等电子网络系统,绝大部分都属于同步系统,即整个网络正常运行是建立在网络内各节点的时间频率基准具备同步关系的基础上。标准时间基准一般由表征时间起始点的秒脉冲(1 PPS)和对应的钟面时(时间计数值)组成,而标准频率基准一般依靠10 MHz(或5 MHz)的晶振或更高稳定度的原子钟(铷钟、铯钟、氢钟、原子钟组等)产生。
本文讨论的高精度时间频率传递主要指时间同步精度优于20 ns、频率准确度指标优于10-11量级的情况。在这种精度条件下,要想通过远距离动态时钟调整或者动态调整频率基准相位来实现物理上的完全时间频率同步有一定的困难。因此,高精度时间传递的方法是节点之间时钟初始同步到一定程度后,残余时差用节点之间的时差测量值来表示;高精度频率传递方法是把节点间频差调整接近到一定程度后,残余量依靠节点间的相对频率差值来表示。
当各网络节点空间分布广、距离间隔远远超过视距范围的时候,必须建立起远距离时间与频率的传递与测试手段。目前被国际电信联盟组织(ITU)认可的技术手段主要有双向卫星时间频率传递法[1]和GPS卫星共视法(Common View,CV)[2]。
2 国外发展情况
双向卫星时间频率传递法和GPS卫星共视法的研究最早由世界各国天文台与授时中心开展并普及,以替代传统的搬运钟方式,简化了工作繁杂程度,提高了数据收集的精度和实时性。目前,国际原子时(TAI)和协调世界时(UTC)由全球65个天文台的250台氢钟和铯原子钟为基础[3],分布如此之广的高精度和高稳定度时间频率基准主要靠这两种技术,以不同的组合来完成各节点的数据收集。
双向卫星时间频率比对法试验最早于1962年在美英之间开展[4],并从频分体制(FDMA)逐渐发展为扩频体制,因为精度最高,一般作为全球时间频率传递和比对的最高标准。这种方法还可以采用地面微波、光纤等介质,最新的扩展应用包括动态目标(飞机、卫星)与地面固定站之间的时间频率比对,以及两个动态目标之间的时间频率比对。
卫星共视法试验开始于1980年,最早由美国国家标准技术局(NIST)的前身与美国海军实验室(NRL)开展[5]。近年来,在GPS共视法的基础上又发展了利用GPS载波相位实现时间频率传递的GPS载波相位法(CP),平滑时间比GPS共视法短,测量精度与最终的处理结果精度更高,可以与双向卫星时间频率比对法等价。但由于需要借助IGS精密星历与模型、事后处理解算载波整周模糊度等,数据处理最复杂,天线相位中心、设备硬件时延的标定与稳定性要求也更高,限于实时性要求不高的高精度应用。
目前,两种技术已广泛应用于全球大型通信网络、高精度无线电测量网络、远程时钟驯服、远程分布组合钟等领域。美国的GPS、广域增强系统(WAAS),欧洲的Galileo、EGNOS卫星导航系统中普遍采用了这两种技术以实现大系统时钟的合成,对卫星钟的连续观测,以及实现站间或者星地之间的时间频率同步。深空探测全球分布的测量站之间的接力观测也依赖这两种技术来实现站间时间与频率基准的相干。
3 工作原理
3.1 GPS共视法原理
GPS共视法[6]是参与比对的双方采用专用的多通道共视接收机在同一时刻分别测量本地与同一组导航卫星之间的伪距(星地时间不同步条件下的距离测量值,含有真实距离、星地钟差及其它空间大气延迟),对连续测量的这两组伪距进行互差及修正处理,就可以解算出节点之间的时间差与频率差。GPS共视法原理见图1。
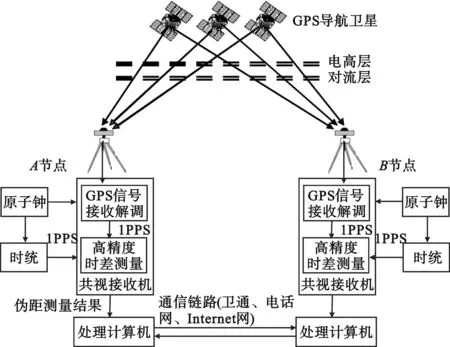
图1 GPS共视法工作原理
设ρSA、ρSB分别是同一时刻地面A、B两个节点的共视接收机以本地钟面时为准测量的接收机天线与导航卫星之间的伪距测量值,一般尽量采用高仰角观测卫星,理想环境条件下伪码测距精度可以优于0.5 ns,表示为
ρSA=RSA+TA-TS+(dhardS+dhardA)+
dtropSA+dionSA+MpA+n
(1)
ρSB=RSB+TB-TS+(dhardS+dhardB)+
dtropSB+dionSB+MpB+n
(2)
这对伪距测量值互差计算,就可以推导得到地面A、B两个节点之间的时差为
dTAB=TA-TB=(ρSA-RSA)-
(ρSB-RSB)-(dhardA-dhardB)-
(dionSA-dionSB)-(dtropSA-dtropSB)-
(MpA-MpB)+n
(3)
式中,TA为A节点钟面时刻,TB为B节点钟面时刻。其它参数如下:
(1)RSA、RSB是当前时刻的地面接收机与卫星之间的真实距离,需要利用天线精确坐标和导航卫星精密星历计算得到。地面天线坐标测量精度可以达到0.1 m,GPS自身星历误差对测距精度的影响在0.8 m左右[7],也可以采用国际大地测量协会国际GPS服务网(IGS)发布的GPS高精度星历,精度更高,但时间滞后较多,适用于实时性要求不高的应用;
(2)dion是当前时刻的地面接收机与卫星之间L频段导航信号传播路径上的电离层延迟,是较大的误差项。当节点之间距离远小于200 km时,两个传播路径上的电离层延迟近似,可在互差计算中对消。当比对双方空间跨度特别大的时候,虽然是同一个导航信号,但两个传播路径分别穿过电离层的传刺点和穿越路径长度差异太大,互差计算不能对消,对比对精度的影响较大,单频用户可以采用GPS电文广播的Klobuchar电离层模型来降低电离层延迟的影响,也可以把采集数据的时间选在午夜之后至太阳升起之前电离层活动较平静的时段,但对于高精度要求的用户,最好采用双频接收机实时观测计算电离层延迟,可以达到约0.3 m精度;
(3)dtrop是当前时刻地面接收机与卫星之间L频段导航信号传播路径上的对流层延迟。当节点之间距离很近的情况下两个传播路径上的对流层延迟近似相等,可在互差计算中对消。当参与比对双方空间跨度特别大的时候,对流层穿越路径差异太大,互差计算不能对消,可以利用各节点实时测量的温度、湿度、气压值结合专用经验模型如Hopfield或Saastamoinen模型来计算消除,高仰角条件下可以达到约0.2 m精度;
(4)dhardS是卫星发射通道硬件时延,互差计算可以消除;
(5)dhardA、dhardB是两个节点分别配置的共视接收机的通道硬件时延,互差计算不能消除,需要定期通过硬件时延零值校准来扣除,在工作过程中还需要保持工作环境的恒温,以保持硬件零值的稳定;
(6)Mp是当前时刻接收机接收卫星信号时的多路径效应,随卫星仰角的变化缓慢变化,不同站址环境不同,差异较大,也不能对消。一般通过合理选择天线架设高度、位置,接收机配置抗多路径扼流环天线、抗多径算法、后处理算法等来降低多路径的影响;
(7)n是系统及测量噪声。
由于GPS接收机测量精度易受环境干扰和多路径影响,另外GPS是中轨卫星,过境时间有限,导致连续比对过程中需要间段性的换星工作。因此,为了最终时差结果的稳定与精度,一般采用多星共视法,对连续测量的多星多组数据进行平滑处理:

(ρsB(k,i)-RsB(k,i)]
(4)
式中,i是参与平滑计算的观测数据计数,N是移动平滑窗的次数,k是参与共视计算的卫星计数,M是参与计算的卫星数量。
由于需要精密卫星星历,因此共视法一般只能采用导航卫星,而不能选择一般的通信卫星,可利用的资源包括GPS、GLONASS、“北斗”导航卫星、Galileo以及WAAS、EGNOS等卫星导航增强系统。
为了获得最高精度的比对结果,要求地面配置设备具备以下条件:
(1)配置专用GPS多通道共视接收机,区别于一般的商业或者导航定位用户机,两者之间的主要区别:
1)共视接收机采用被测节点的时间基准、频率基准,接收机的时间基准(1 PPS)稳定,一旦完成初始同步,测量过程中不再动态调整跟踪GPS时间,以保持原始测量数据的连续性、稳定性;而普通导航定位接收机的时间基准漂移速度受内部晶振准确度和稳定度的影响,快速漂移后需要不断动态调整跟踪GPS时间,而时钟调整过程中会导致时差测量结果的突跳;
2)共视接收机硬件时延的温度稳定性要求高,需要特殊设计和工作环境条件保障;
3)为了提高比对精度,采用民用双频接收机以测量电离层延迟,GPS军用导航频率L2信号的接收采用无码接收技术,设备相对复杂,造价更高;
(2)为了把两处的测量数据收集到一起进行处理,两个节点之间需要建立数据通信链路,例如卫星通信(简称卫通)、电话线、Internet网等;
(3)需要配置气象采集设备,获取温、湿度、气压数据用于对流层延迟的消除; IGS发布的精密星历可以通过互联网获取。
GPS共视法的优点是大量用户可以同时比对互不影响,地面站只接收导航信号而不用发射信号,设备配置简单,造价相对较低。同时从以上分析中我们也可以看到,共视法实际应用中影响精度的因素比较多:卫星导航信号到达地面的功率很弱,而共视接收机需要同时接收大空域分布的多颗导航卫星的信号,采用宽波束低增益天线,因此信号稳定接收与测量精度都极易受外界干扰和多径环境的影响;最终实现的精度受站址坐标、星历精度影响大,空间传输过程中的各种误差项随网络节点间的距离、空间分布不同差别也较大;数据处理复杂程度相对较高,必须依靠长时间段的数据平滑或者后处理来提高精度,处理的时间较长,实时性有限。理想情况下,GPS共视法能够实现5~10 ns的时间同步精度,频率同步精度为1×10-14量级[6]。
3.2 双向卫星时间频率传递原理
双向卫星时间频率传递法[8]的比对双方配置同样的专用卫通终端,利用同步通信卫星的透明转发器作为时间频率信息的远程传递媒介。同步通信卫星具备对地球大范围的覆盖能力,透明转发器工作方式简单稳定,不会因为任务队列或调度引入多余的时延。ITU标准建议采用扩频信号体制[1],扩频体制的优势在于:
(1)同一条链路可以同时实现比对双方时间频率信息与数据信息的互传;
(2)扩频体制能够提供更高的时差测量精度和抗干扰能力;
(3)采用码分多址体制(CDMA),同一通信频点可以支持比对双方同频工作,保持双方信号通过卫星透明转发器的硬件时延相同;而且CDMA体制还可以支持更多用户在本频率上同时进行比对工作。
正式工作中,比对双方的卫通终端在本地钟面时刻向对方发送扩频后的数据信号,扩频码前沿对应本地时间1 PPS的起始延;同时卫通终端也接收并精确测量对方发射信号经过整个空间传输过程的伪距(站间时间不同步条件下信号空间传输路径的距离测量值,含有真实传输路径距离,站间钟差,上下行链路所有的大气延迟,以及卫星、地面设备收发硬件时延)。测量结果作为通信数据双方彼此互发,这一对伪距测量结果互差计算并修正,可以解算得到节点间的时差和频差。双向卫星时间频率传递法的工作原理见图2。
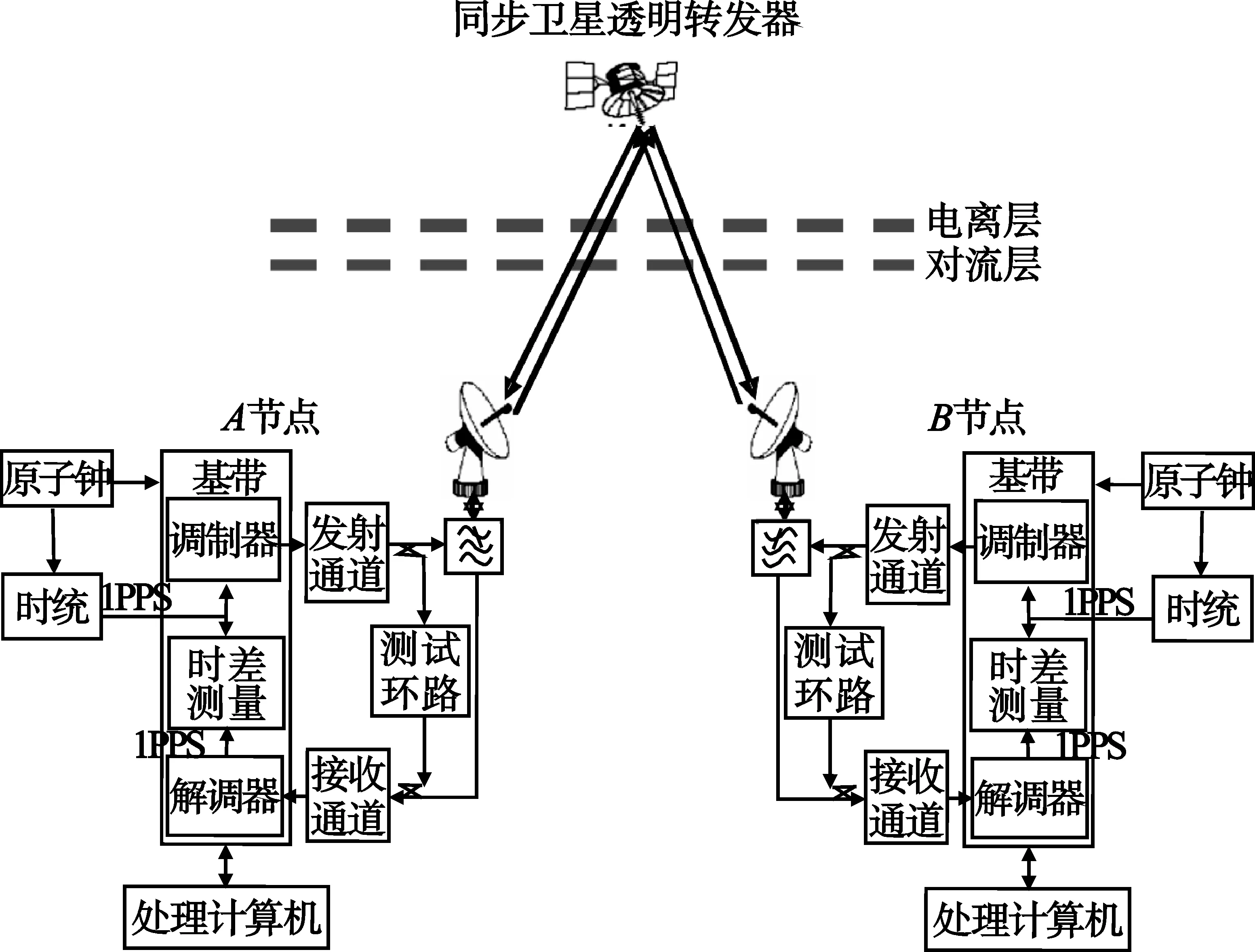
图2 双向卫星时间频率传递原理
设ρASB、ρBSA分别是同一时刻地面A、B两个网络节点比对终端测量的高精度扩频伪距测量值,由于工作信号强、C/No高,伪距测量精度可以优于0.5 ns,表示为
ρASB=RASB+(TA-TB)+
(dThardA+dShardAB+dRhardB)+
dtropASB+dionASB+SagnecASB+n
(5)
ρBSA=RBSA+(TB-TA)+
(dThardB+dShardBA+dRhardA)+
dtropBSA+dionBSA+SagnecBSA+n
(6)
这对伪距测量值互差计算,就可以推导得到地面A、B两个节点之间的时差为
dTAB(t)=TA-TB=
(7)
式中,TA为A节点钟面时刻,TB为B节点钟面时刻。其它参数如下:
(1)RASB、RBSA分别是A节点经过卫星到B节点的路径传输时延,以及B节点经过卫星到A节点的路径传输时延;由于同步卫星位置稳定,理论上可以认为两者完全相等,互减计算可以对消;
(2)SagnecAB是信号在空间传输这段时间内地球自转引入的路径误差,称为Sagnec效应,误差范围取决于卫星和节点A、B的空间位置,最大可以达到约100 ns[4],但对卫星、站址坐标的精度并不敏感,可以利用粗略坐标计算予以消除;
(3)dtropASB、dtropASB分别是A节点到卫星到B节点整个路径上的对流层延迟,以及B节点到卫星到A节点整个路径上的对流层延迟,两个方向上的传输路径相同,且对流层是非色散介质,对不同频率电磁波的延迟相同,互差计算可以对消;
(4)dionASB、dionBSA分别是A节点到卫星再到B节点传输链路上两次穿越电离层的延迟,以及B节点到卫星再到A节点传输链路上两次穿越电离层的延迟。电离层具有色散性,延迟量近似与工作频率的平方成反比。本双向传输方案中上行下行工作频点不同,电离层延迟实际上存在差异,但由于卫通工作频段一般选择Ku频段(或C、X、Ka频段)等高频段工作,电离层延迟极小,互差计算后的影响远小于纳秒量级,可以忽略不计;
(5)dRhardA、dThardA、dRhardB、dThardB分别是节点A、B接收/发送设备引入的通道硬件延迟零值,不能通过计算简单对消。需要通过校准设备搬运等专用误差传递方法,对两个站比对设备的硬件时延定期校准来消除,比对过程中还需要保持工作环境的恒温,以保持硬件延迟零值的稳定;
(6)dShardAB、dShardBA是比对双方信号通过卫星透明转发器引入的硬件时延,转发器以宽带变频方式工作,硬件时延小,稳定性好。由于采用扩频CDMA体制,比对双方工作频率相同,两个方向的信号传输经过同一个转发器通道,硬件时延基本相同,因此互差计算时此项可以对消。需要注意的是,当卫星转发器饱和工作,或者存在码间干扰的情况下,可能会导致这一指标异常不能对消。另外,部分跨洲际通信的卫星透明转发器,由于收发覆盖的区域不同,配置的收发天线、信道不同,也会导致这一项不能完全对消;
(7)n是系统及测量噪声。卫通天线波束窄,增益高,一般对星工作仰角高,工作信噪比高,因此外界干扰、多径影响小,同时经过一段时间对测量值的平滑处理后,本项影响较小。
因此网络节点A、B的钟差传递处理结果为

SagnecAB+n
(8)
双向卫星时间频率传递设备与一般VSAT站设备规模相当,但需要注意的是与常用VSAT设备相比,双向卫星时间频率传递设备更强调收发信道的线性工作与硬件时延的温度稳定性,信道带宽要求更宽,本振相噪指标要求高,以满足高精度伪距测量的需求,设备相对复杂,造价相对较高。
双向卫星时间频率传递法的优点是系统工作中时间频率传递与数据通信同时完成,不需要另外再建数据传输链路;传输路径延迟和大部分误差项可以直接对消,对卫星和站点坐标精度依赖性小,数据处理简单快捷;采用抛物面天线,波束窄,工作信号强,受多路径效应、外界干扰等外界环境的影响较小;实时性好,短时间的比对和处理就可以获得很高的时间频率比对精度,在要求的载噪比条件下,时间同步精度最高可以优于1 ns,频率同步精度为3×10-15~5×10-15量级[4]。不足之处是终端设备需要同时收发信号,设备功耗大,链路设备复杂,造价较高,长期运行需要租用卫星转发器的费用,一般采取间隔工作,每周固定时段工作的方式。传递的距离受限于同一颗同步通信卫星透明转发器的覆盖能力,同时比对的用户数也受限制。由于工作时需要发射信号,军用保密性弱,易受阻塞式干扰。
4 两种技术手段的比较
从以上分析中可以看出:双向卫星时间频率比对方式实时性强,不易受外界环境影响,实现精度最高;而GPS共视法设备只接收信号,设备简单成本较低,但实现精度比双向卫星时间频率比对法精度低。从技术角度对两种技术作一个简单比较,如表1所示。
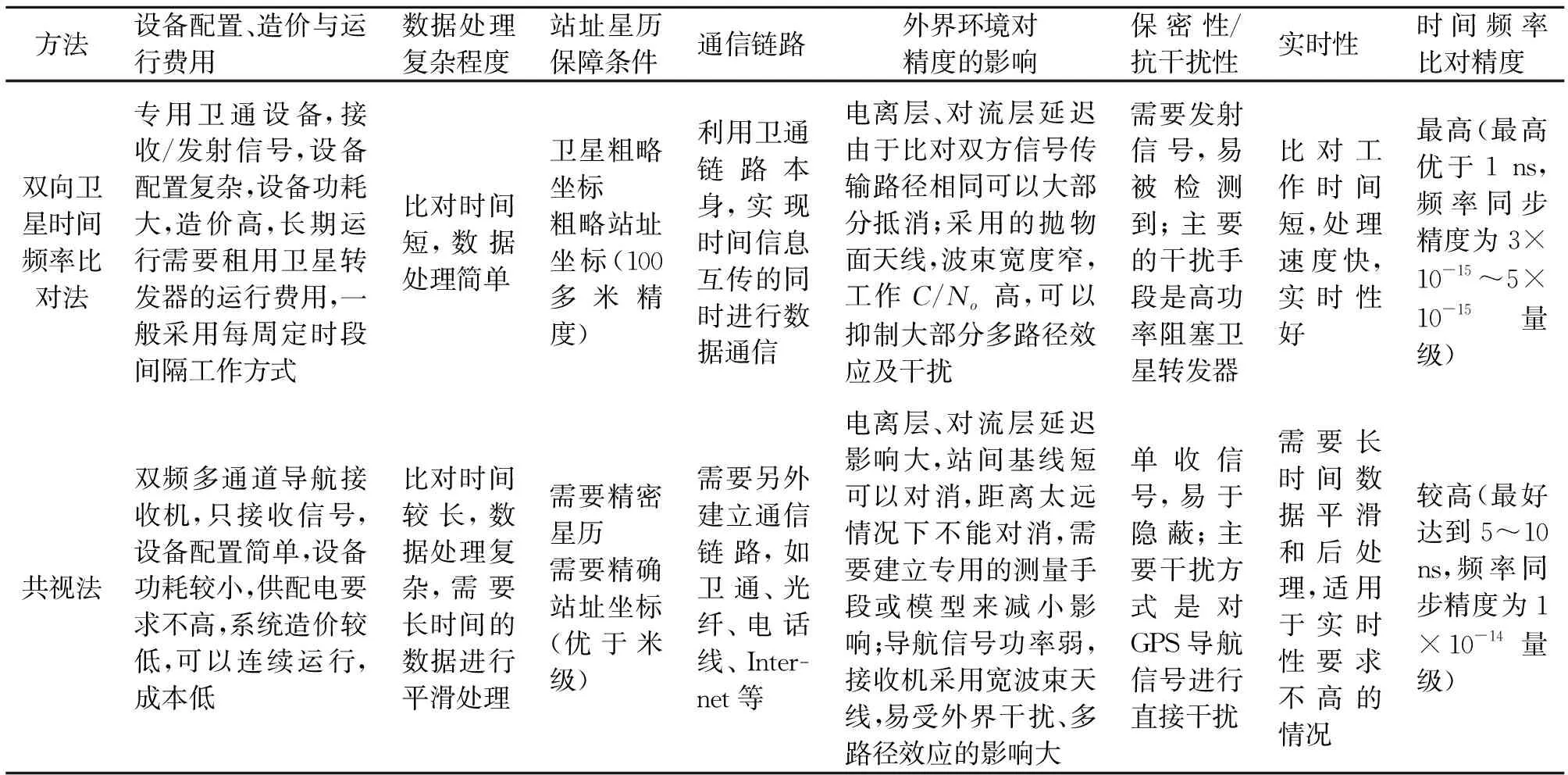
表1 双向卫星时间频率比对法与共视法比较
特别强调的是,从工程应用的角度,片面强调这两种技术二选一的竞争性是不恰当的。如果我们把这两种手段与实验室标准仪器测试进行比较,就会发现实验室环境条件稳定,仪器测量直接,测量精度最高,过程直观,没有复杂的传输链路介入,便于测量异常的识别。而双向卫星时间频率比对法与GPS共视法虽然方案不同,如果单独使用却都存在共同的缺陷:
(1)两种方法都是远距离无线链路传递,引入大量中间设备和传递环节,不可避免受外界环境、传递设备可靠性、稳定性等因素的影响,测量结果存在一定的不确定性;
(2)当出现系统性异常或误差,既使有备份设备,仅依靠这两种技术自身难于快速检测和分辨异常来源。GPS共视法可能的系统异常与误差包括导航卫星异常、空间信号干扰、电离层闪射影响等。卫星双向时间频率比对法可能的系统性误差包括星间信号干扰、地面站间信号干扰、转发器信道饱和、多用户码间干扰等;
(3)这两种技术设备一旦远距离安装,必须通过第三方仪器传递的方式校准;独立长期连续运行后,没有其它第三种更可靠的独立技术手段来对它们的工作状态和精度进行实时远程测试与监管。
5 结 论
从以上分析可以看到,GPS共视法和双向卫星时间频率传递法各具优势和特点。网络应用系统对时间频率同步的依赖性越大,精度要求越高,如果单独采用以上任意一种方案,由于缺乏必要的监测与备份手段,长期连续运行后出现系统性误差或传递设备异常,都难以快速检测并加以分离。因此,对这两种技术的应用绝不是二选一的竞争关系,而应该是一种互补关系。
建议重大工程、大型时频中心的建设中为了确保网络时统的长期可靠性与稳定性,应该综合应用以上两种时间频率传递技术,形成远距离站间高精度时间频率基准传递的标准与操作规范。两种手段的工作原理、技术手段、技术途径完全不同,同时工作又彼此独立,可以实现对测量结果和精度的实时监测与交叉互验,实现快速异常检测与分离,也可以作为互为备份的技术手段。
参考文献:
[1] RECOMMENDATION ITU-R TF.1153-2,the operational use of two-way satellite time and frequency transfer employing PN codes[S].
[2] RECOMMENDATION ITU-R TF.767-2,Use of global navigation satellite systems for high-accuracy time transfer[S].
[3] Pratap Misra,Per Enge.全球定位系统-信号、测量与性能[M].2版.北京:电子工业出版社,2008.
Pratap Misra,Per Enge.Global Positioning System Signals,Measurements,and Performance[M].2nd ed.Beijing:Publishing House of Electronics Industry,2008.(in Chinese)
[4] Dieter Kirchner.Two-way time transfer via communication satellites [J].Proceedings of IEEE,1991,79(7):983-990.
[5] Jay Oaks,James A. Satellite Time Transfer Past and Present [C]//Proceedings of the 34th Annual Precise Time and Time Interval (PTTI) Meeting.Virginia,USA:IEEE,2002:7-18.
[6] David W Allan,Marc A Weiss.Accurate time and frequency transfer during common-view of a GPS satellite[C]//Proceedings of the 34th Annual Frequency Control Symposium. Monmouth, WJ:IEEE,1980:334-356.
[7] Elliott D Kaplan, Christopher J Hegarty.GPS原理与应用[M].2版.北京:电子工业出版社,2007.
Elliott D Kaplan, Christopher J Hegarty.Understanding GPS Principles and Applications[M].2nd ed.Beijing:Publishing House of Electronics Industry,2007.(in Chinese)
[8] Hanson D W.Fundamentals of Two-Way Time Transfer by Satellite[C]//Proceedings of the 43rd Annual Symposium on Frequency Control.Denver,CO,USA:IEEE,1989:174-178.
猜你喜欢
中学生数理化·八年级物理人教版(2019年12期)2019-05-21
电子制作(2019年23期)2019-02-23
测控技术(2018年6期)2018-11-25
测控技术(2018年6期)2018-11-25
电子制作(2018年19期)2018-11-14
电子制作(2018年11期)2018-08-04
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24
系统工程与电子技术(2016年7期)2016-08-21
测绘科学与工程(2016年5期)2016-04-17
