
基于Pro/E及ADAMS液态施肥机扎穴机构的设计与仿真
2010-09-20 00:24:04刘亚华王金武王金峰鞠金艳
东北农业大学学报 2010年2期
刘亚华,王金武,王金峰,鞠金艳
(东北农业大学工程学院,哈尔滨 150030)
传统施肥机械都是对农作物进行开沟固体施肥,若遇地面干燥土质较干,则使作物对肥力吸出较慢,不利于作物生长,若遇土质太湿,不利于开沟施肥,从而对作物生长期的需肥状况造成不利影响,若采用人工施肥则提高了劳动强度并且效率低下。液态施肥机克服传统施肥机的缺点,可将化肥直接施在作物根系侧旁,作物吸收快、利用率高,节约肥料,能有效减轻环境污染。因此,液态施肥机极具应用价值。扎穴机构是将喷肥针扎入土壤并喷施液态肥的机构,是液态施肥机关键工作部件,其工作性能决定了施肥机施肥质量、工作可靠性和作业速度[1-7]。本文运用Pro/E软件绘制出机构各零部件的三维实体图和机构装配图,而后转到专业的运动学仿真软件下,添加约束和运动副,最终形成系统的虚拟样机。它把建立物理样机原型的需求降到了最小,提高了创造性,并有助于在更短的时间内提供更好的产品。应用Pro/E与ADAMS软件联合仿真得出扎穴机构针尖运动轨迹,对轨迹进行分析,提出改进的方法。
1 结构及工作原理
椭圆齿轮扎穴机构是一种旋转式扎穴机构,行星架旋转1周,扎穴1次。其机构设计见图1。
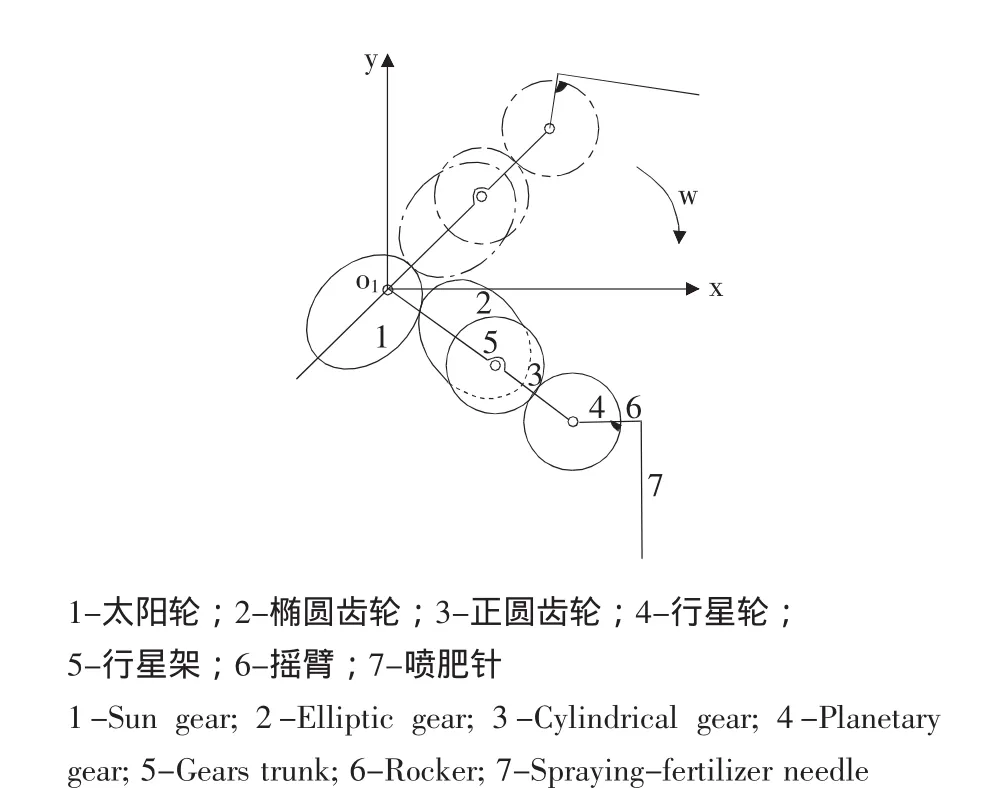
图1 扎穴机构结构Fig.1 Pricking hole mechanism
由两个全等椭圆齿轮1、2和两个全等正圆齿轮3、4以及行星架5、摇臂6、喷肥针7组成,两个椭圆齿轮的回转中心均在椭圆齿轮的焦点上,在行星架处于初始相位角(即初始安装位置)时,两椭圆齿轮长轴共线。齿轮2和齿轮3固结为一体,中心椭圆齿轮1(亦称太阳轮)固定不动。工作时,齿轮箱(即行星架)在驱动轴的带动下,相当于一个原动件绕太阳轮的回转中心转动。通过键和行星轮轴与行星正圆齿轮固结的一对摇臂,其牵连运动是随着齿轮箱做圆周运动,相对运动是随着行星圆齿轮作不等速逆向运动。按照设计优化后的参数,针尖可以按要求的姿态(角位移和轨迹)运动[8-9]。
2 建立扎穴机构虚拟样机
2.1 沿曲线阵列法的椭圆齿轮建模
椭圆齿轮建模采用沿曲线阵列法,仅适用Pro/E 3.0及以后更高级的版本。建模的主要参数有:模数m、齿数z、分度圆压力角angle_α、齿顶高系数ha*、顶隙系数c、齿宽B、椭圆长半轴α、椭圆短轴与长轴之比k等。椭圆齿轮参数见表1。
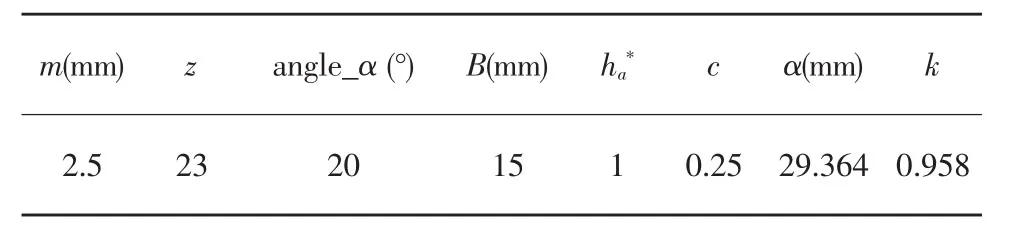
表1 椭圆齿轮主要参数Table1 Main parameter of elliptic gear
椭圆齿轮的建模过程:根据参数草绘出分度椭圆曲线—在椭圆长轴对称一侧利用基准曲线工具,建立笛卡尔坐标下的渐开线曲线—应用拉伸命令拉伸出齿廓—利用分度圆曲线阵列所有齿廓,见图2[10]。
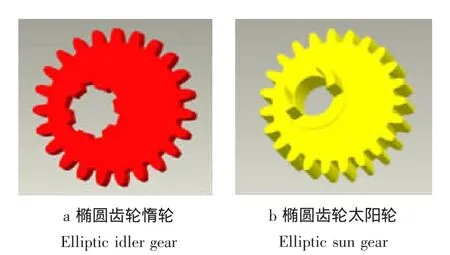
图2 椭圆齿轮模型Fig.2 Elliptic gear model
2.2 正齿行星轮扎穴机构各部件装配
根据需要,设计了齿轮箱、轴、行星架等部件,与上述设计的椭圆齿轮进行总体装配。装配后模型如图3所示。
3 运动学仿真
3.1 Pro/E运动学仿真
机构总体装配之后,即可运用软件自带的机构/运动分析功能进行运动学仿真。设置齿轮之间的传动比,以及机构前进速度,得到喷肥针尖的绝对运动轨迹,如图4所示。
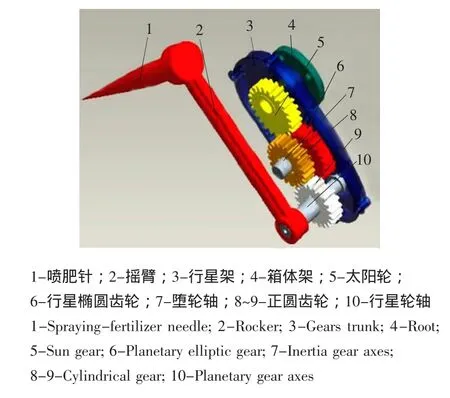
图3 扎穴机构装配模型Fig.3 Assembly model of pricking hole mechanism
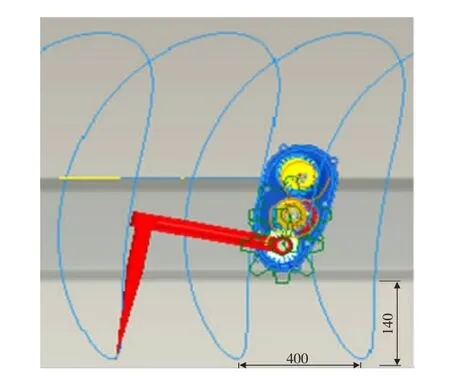
图4 喷肥针绝对运动轨迹Fig.4 Absolute motion trajectory of spraying-fertilizer needle
在扎穴过程中,喷肥针基本能实现垂直入土和垂直出土的作业要求,避免喷肥针划出长长的沟痕,减少了土壤对喷肥针的损伤;喷肥针扎穴机构入土深度为140 mm,在苗带两侧交错扎穴,即可以满足穴距200 mm的要求。
3.2 应用ADAMS进行仿真分析
3.2.1 模型导入ADAMS与约束设置
相对于Pro/E而言,ADAMS的仿真能力能更强,所以作者在Pro/E建立好模型后导入到ADAMS中进行分析。齿轮、齿轮轴均定义为刚体,材料为Steel,忽略相互之间的弹性变形。在各部件间施加约束:两根齿轮轴分别添加旋转副,行星系箱体架4与大地固接。轴与齿轮间均用固定副固定在一起以便于分析。两对齿轮间的啮合均采用碰撞副,碰撞副参数设置如下:碰撞类型为实体对实体,计算碰撞力的方法选择冲击函数法,添加S接触刚度为 1.0×105N·mm-1,指数为1.5,阻尼为50 N·s·mm-1,切入深度为 0.1 mm;摩擦力计算方法选库仑法,添加静态系数为0.3,动态系数为0.1,静滑移速度为100 mm·s-1,动滑移速度为1 000 mm·s-1;在行星架3上添加电机驱动[11-12]。
3.2.2 仿真结果与分析
利用ADAMS软件进行运动学仿真可知,两对齿轮啮合正常,没有出现干涉现象。得出喷肥针单次和两次运动轨迹,如图5所示。
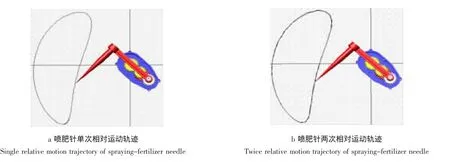
图5 喷肥针相对运动轨迹Fig.5 Relative motion trajectory of spraying-fertilizer needle
仿真结果符合预期的设计要求,得到生产要求的相对运动轨迹为泪滴型轨迹,从而验证了模型建构和仿真分析的正确性。但喷肥针尖运动的轨迹并不是光滑的,呈现锯齿状,如图5a所示;进一步加长仿真运动时间,观察喷肥针尖运动的轨迹,发现循环两次运动的轨迹并不重合,如图5b所示。分析原因如下:①由椭圆齿轮的基础知识可知,齿轮相互间啮合时,压力角与重合度是瞬时变化的,这也显示了椭圆齿轮传动的相对不平稳性;②在ADAMS仿真前,已经设置各部件的材料、质量、转动惯量等属性,由于齿轮间碰撞惯性力的存在,使齿轮啮合瞬间轮齿摆动;③椭圆齿轮在建模过程中,齿廓是通过阵列的方式得到,与实际椭圆齿轮的加工不完全一致;④齿轮在啮合过程中存在齿间间隙。
以上原因都可能导致了椭圆齿轮扎穴机构仿真运动轨迹的锯齿形状。由于液态施肥机本身工作环境较为恶劣,精度要求较低,且仿真过程中各参数的长度单位均设置为毫米(mm),因此此轨迹已符合实际工作要求。实际工作过程中,齿轮采用线切割加工,提高各零部件加工精度,减小齿轮模数,都可使轨迹更为平滑。
4 结论
利用Pro/E、ADAMS虚拟样机技术进行机构设计、运动仿真分析,大大减少了传统的物理样机制造和实验过程,具有重大的工程实用价值。根据设计参数,基于参数化造型技术软件Pro/E对扎穴机构进行造型,装配后利用Pro/E与ADAMS运动学联合仿真。仿真结果表明,根据设计参数建立的扎穴机构虚拟样机满足扎穴机构的运动要求,达到预期的设计目的。椭圆齿轮行星系作为液态施肥机的扎穴机构,是其在农业机械领域应用中的又一创新。
[1]谭伟明,胡赤兵,冼伟杰,等.非圆齿轮滚切最简数学模型及其图形仿真[J].机械工程学报,2001,37(5):71-82.
[2]裴艳兰,和丽,许纪倩.高速水稻插秧机中非圆齿轮齿廓的图形仿真[J].机电产品开发与创新,2007,20(5):96-97.
[3]冯金龙,王金武.探针注入式深层施肥机构的运动分析[J].农机化研究,2007(4):64-65.
[4]陈志刚,吴雪飞.基于Pro/E及ADAMS圆柱齿轮减速器的参数化建模及运动仿真[J].机械研究与应用,2005,18(2):105-106.
[5]王金峰,王金武,葛宜元.深施型液态施肥装置的设计与试验[J].农业机械学报,2009,40(4):58-62.
[6]王金武,纪文义,冯金龙,等.液态施肥机的设计与试验研究[J].农业工程学报,2008,24(6):157-159.
[7]王金峰,王金武.液态变量施肥机两种不同变量机构的研究[J].农机化研究,2007(1):123-125.
[8]赵匀,俞高红,武传宇,等.机构数值分析与综合[M].北京:机械工业出版社,2005.
[9]俞高红,赵凤芹,武传宇,等.正齿行星轮分插机构的运动特性分析[J].农业机械学报,2004,35(6):64-67.
[10]钟日铭.Pro/ENGINEER Wildfire 3.0中文版机械设计实例教程[M].北京:清华大学出版社,2007.
[11]郑建荣.ADAMS虚拟样机技术入门与提高[M].北京:机械工业出版社,2002.
[12]李增刚.ADAMS入门详解与实例[M].北京:国防工业出版社,2006.
猜你喜欢
纺织学报(2023年9期)2023-10-31 08:27:08
中国特种设备安全(2022年4期)2022-07-08 02:42:40
农业工程学报(2022年1期)2022-03-25 01:13:24
装备制造技术(2020年4期)2020-12-25 05:26:04
酒·饮料技术装备(2018年1期)2018-04-28 09:08:56
资源再生(2017年3期)2017-06-01 12:20:59
时代农机(2016年6期)2016-12-01 04:07:20
江苏农机化(2015年6期)2015-12-07 11:58:18
环境科技(2015年4期)2015-11-08 11:10:40
核科学与工程(2015年2期)2015-09-26 11:57:24
