
棱镜法面阵CCD垂直拼接的应用
2010-09-18 08:55:04张继超李延伟张洪文
长春理工大学学报(自然科学版) 2010年4期
张继超,李延伟,张洪文
(中国科学院 长春光学精密机械与物理研究所,长春 130033)
随着光学技术与电子技术的飞速发展,遥感器也在快速的发展。同时,对成像介质的要求也在不断的提高。近些年,成像介质在不断的发展,由原来的胶片发展为线阵CCD,又由线阵CCD向面阵CCD发展,面阵CCD也由小面阵逐渐的向大面阵发展[1,2]。但是由于现阶段技术的局限,大面阵CCD的生产还存在困难,即使生产出来价格也非常昂贵。因此,利用多片面阵 CCD进行拼接代替单片的大面阵 CCD成为了遥感器研究的关键技术之一[3-5]。本文从某型号航空遥感器的宽覆盖要求出发,利用两片成像靶面为5K×6K的面阵CCD,通过拼接得到6K×10K的成像靶面。
1 拼接方式的选择
目前比较常见的 CCD拼接方式主要有机械拼接与光学拼接两种。机械拼接是在普通显微镜下进行的,容易保证两个 CCD器件拼接后共面及两相邻像素之间的对准误差、平行度误差等,是线阵CCD拼接的常用方式,如图 1(a)所示。线阵CCD遥感器为扫描工作方式,拼接的间距不会对其成像产生影响。由于面阵 CCD器件为分幅成像器件,故拼接时像元要相接,才不至于丢失图象。5K×6K的面阵CCD机械壳体较大,机械拼接时,无法将像元拼接到一起。因此,面阵 CCD拼接选择光学拼接比较合理,拼接精度也比较高,拼接方式如图1(b)所示。

图1 机械拼接和光学拼接示意图Fig.1 Illustration of mechanical and optical assembly
2 光学拼接原理与技术要求
光学拼接是以分光的方法把光束均等地分成两路,形成两个等效的焦平面。在两处焦平面上分别安装 CCD,接收口径内不同部分的光。调整CCD的位置,使 CCD的有效像元搭接,拼接后像面的亮度均匀。
光学拼接中的分光棱镜为两块三角棱镜胶合而成的,在胶合面上镀半反半透膜层。光线经棱镜后分光,分别到达两块CCD上。分光后的光能变低,降低为原来的一半,可以通过调节快门的曝光时间和调整CCD的增益来弥补。
光学拼接存在这样一个问题,接收透射光成像的CCD所成像为相似像,接收反射光成像的CCD所成像为镜像像。拼接时需将镜像像再镜像一次,得到相似像,然后对两个相似像进行拼接,得到完整的图像,拼接示意图如图2所示。

图2 拼接示意图Fig.2 Illustration of the assembly
拼接过程中,调整两 CCD的位置是关键,须保证拼接精度要求,包括共面、搭接和平行要求。
(1)共面要求[6]
共面是要求两 CCD安装在分光后的等光程位置上,既等效像面上。允许有一定的误差,但不能超过遥感器总体分配给像面的误差。
(2)平行要求
平行是要求搭接后,两块CCD的拼接边平行,保证成像后整幅的景物为长方形。
(3)搭接要求
搭接是要求像元有一定的重叠数量,以免丢失景物,搭接也不能过多,浪费有效像元,减小收容宽度。
3 拼接方法
根据现有的技术水平和条件,选取5K×6K的面阵 CCD器件来拼接。拼接方式有两种选择,拼接成 5K×12K 与 6K×10K 两种方式。相比之下,6K×10K的边长更接近,需要的像面尺寸更小,拼接后 CCD的边缘更接近镜头的中心视场,故选取这种拼接方式。
棱镜法对 CCD进行拼接,要求拼接后共面误差不大于 0.02mm,相接边的平行度误差不大于0.01mm,要求搭接像元不大于10个。
3.1 确定等效像面
CCD的拼接需要在专门的设备上进行,首先确定两等效像面位置,工具如下:照明设备、十字丝靶面、平行光管。如图(3)所示。
照明设备、十字丝靶面和平行光管提供无穷远目标,通过镜头成像,经分光棱镜进行分光,得到两个等效像面。用显微镜观察像面,用千分表进行测量,读出像面到两个 CCD调整垫的距离,修整调整垫使像面重合。
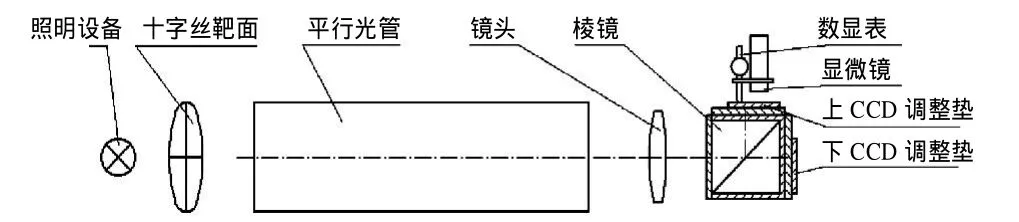
图3 确定等效像面Fig.3 Confirm of equivalent image surface
3.2 拼接
CCD拼接需要在长后工作距离的工具显微镜下进行。
将上CCD安装在棱镜组件上,CCD外框调整到与棱镜边缘平行,成像面位于棱镜中心,固定作为基准。将整体放置在工具显微镜的工作台上,用工具显微镜观察 CCD的像元,移动滑板,使工具显微镜的十字丝与CCD宽度方向第8个像元重合。
将下CCD安装在棱镜组件上,将上CCD用黑纸挡上。用工具显微镜观察下 CCD的像元,利用微调机构调整下CCD位置,使下CCD宽度方向第8个像元与十字丝重合,实现宽度方向搭接8个像元。
移动工具显微镜,到下CCD边缘,使下CCD边缘与工具显微镜的十字丝重合。将下 CCD用黑纸挡上,上 CCD的黑纸取下,利用微调机构调整上 CCD,使上 CCD边缘与十字丝重合,实现两CCD边缘平齐。拼接完成。
4 精度分析
4.1 共面误差
在两块 CCD拼接前,用显微镜分别观察两等效像面,取四个角和中心作为观测点,然后修整CCD安装面,调整安装面的厚度与角度,使两像面重合。共面误差为显微镜的焦深,即为0.02mm。本遥感器焦深0.07mm,误差为焦深的三分之一,满足总体误差分布原则。
使调焦镜前后运动,找到像面位置,两块CCD能够同时获得清晰图象,满足使用要求。
4.2 平行误差
由拼接原理可知,平行误差为像元的误差,即小于0.009mm。折算成角误差为0.6'。
4.3 搭接误差
本拼接中,像元在5K方向上搭接为8个像元,在6K方向上对齐,两个方向上的拼接误差均小于一个像元。
5 试验
某遥感器应用此方法进行了拼接,对外景进行成像,并进行拼接。对外景的成像结果如图4(a)所示。成像后将CCD2图像镜像,然后与CCD1图像拼接,拼接结果如图4(b)所示。

图4 对外景成像Fig.4 Picture of outer scene
6 结论
不同类型的遥感器,其焦深不同,焦平面的大小和结构也各不相同。应根据遥感器的成像原理与成像特点设计与之相适应的焦平面结构。本文结合可见光面阵 CCD遥感器的焦平面特点和器件的结构尺寸与成像特性,设计了一种棱镜法对 CCD进行垂直拼接。与传统的机械拼接方式相比,拼接效果好,精度高。经试验,该方法的共面误差小于0.02mm,搭接误差小于一个像元,平行误差小于0.009mm,满足遥感器的使用要求。可供其它遥感器的研究与实践借鉴。
[1]肖江,胡柯良,林佳本,等.用大面阵CCD实现全日面像自动导行[J].光学精密工程,2008(16):1589-1594.
[2]史磊,金光,安源,等.一种遥感遥感器的CCD交错拼接方法研究[J].红外,2009,30(1):12-35.
[3]李朝辉,王肇勋,武克用.空间遥感器CCD焦平面的光学拼接[J].光学精密工程,2000(3):213-216.
[4]李英才,刘亚南,相宝林,等.提高线阵CCD拼接精度的研究[J].测试技术学报,2002(16):430-434.
[5]Paul R Jorden,David G Morris,Peter J Poo1.Technology of large focal planes of CCDs[C].Proc.SPIE,2004,5167:72-82.
[6]任建岳,孙斌,张星祥,等.TDICCD交错拼接的精度检测[J].光学精密工程,2008(16):1852-1857.
猜你喜欢
天水行政学院学报(2022年4期)2022-11-18 09:02:36
文史春秋(2022年4期)2022-06-16 07:12:52
数学大王·趣味逻辑(2021年3期)2021-03-10 11:21:26
少儿美术(快乐历史地理)(2020年4期)2020-02-24 13:06:28
学苑创造·A版(2019年4期)2019-05-10 00:19:52
汽车观察(2018年12期)2018-12-26 01:05:24
电子测试(2018年15期)2018-09-26 06:01:20
科学与财富(2018年20期)2018-08-22 19:35:16
数学大世界(2018年1期)2018-04-12 05:39:05
测绘科学与工程(2017年1期)2017-05-04 03:40:45
