
4R1P型主动平衡器的设计研究
2010-09-14 07:17:34姚燕安查建中
中国机械工程 2010年10期
张 英 姚燕安 查建中
北京交通大学,北京,100044
4R1P型主动平衡器的设计研究
张 英 姚燕安 查建中
北京交通大学,北京,100044
4R1P型主动平衡器为独立式结构,由平面两自由度4R1P机构和控制电机组成,4R1P机构的一个输入轴兼作输出轴,与待平衡机构相连,另一个输入轴与控制电机相连,通过对4R1P机构结构参数和控制输入的恰当设计实现平衡作用。建立了基于输入扭矩、摆动力矩、摆动力和控制电机最大功率的优化设计模型,提出了相应的设计步骤,并给出了该型主动平衡器的设计算例,结果表明:在不同的平衡目标下,4R1P型主动平衡器的两种安装方案对机构各项动力指标都具有较好的平衡作用,通过调整其控制输入运动规律,可以有效地补偿因工况改变而造成的机构动力性能的变化。
主动平衡;摆动力矩;输入扭矩;摆动力;平面4R1P机构
Abstract:A 4R1P-active balancer was an independent device,consisting of a planar two-DOF 4R1P mechanism and a controllable motor.One input shaft of the 4R1P mechanism doubled as its output shaft,connected to the machine to be balanced.T he another input was driven by a control motor.One or more dynamic effects of the mechanism can be minimized by selecting speed trajectories and structural parameters of the 4R1P mechanism properly.An optimization model was developed based on the input torque,the shaking moment,the shaking force and the maximum power of the control motor.And the design procedure was put forward.T aking a force-balanced crank-rocker mechanism asthe reference mechanism,numerical examples were givento demonstrate the effectiveness of the proposed balancer.The results show that flexible dynamic balancing effect on the dynamic performance under different working conditions can be achieved by attaching the proposed balancer to both of the output shaft and the input shaft of the machine to be balanced.The deterioration of dynamic factors caused by alterative working conditions can be compensated effectively by redesigning the control parameters of the balancer.
Key words:active balancing;shaking moment;input torque;shaking force;planar 4R1P mechanism
0 引言
机构动力平衡是机械领域研究的重要课题之一,相关的研究方法和成果很多[1-2],在常用的配重法和附加机构或杆组法等平衡方法基础上,文献[3-6]提出了通过鲁棒设计、改变输入构件转速函数和引入冗余驱动器等方法来提高平衡方法的适应性。尽管如此,机构动力平衡方法在适应各种变化的柔性、结构的独立性和对原机构的影响等方面仍存在有待改善的余地,为此,文献[7-8]提出一种结构独立的主动平衡器的设计理念,旨在不影响原机构结构的情况下,通过引入控制系统实现机构的平衡,并在外部工况或内部参数发生变化时,主动地对机构动力性能进行补偿以实现机构的柔性平衡。
1 主动平衡器及其平衡原理
主动平衡器的核心为一个平面两自由度执行机构和一个控制电机,为了保证其安装不影响待平衡机构原有结构和运动特性,其执行机构的两个输入轴之一兼作输出轴,视需要与待平衡机构的输入轴、输出轴或其他运动构件相连,并以相同的规律运动,另一输入轴与控制电机相连,由控制电机为其提供对待平衡机构动力性能进行调节所需的运动。
综合考虑设计要求、结构和控制复杂度等因素,文献[8]提出以平面两自由度5R机构和4R1P机构为执行机构的两类主动平衡器构型。其中,4R1P型主动平衡器的执行机构可看作变结构四杆机构,如图1a中EFGH所示,构件7与8以转动副相连,滑块8由控制电机驱动;控制输入为零时,EFGH为常规四杆机构;控制输入不为零时,该机构就成了机架长度l9可随滑块8运动而变的两自由度机构。
以图1b所示曲柄摇杆机构ABCD为待平衡机构,分别在其输出构件3和输入构件1上加装4R1P型主动平衡器,如图1c和1d所示,并将这两种安装方式分别称为方案1和方案2。

图1 4R1P型主动平衡器及其安装方案简图
图1中,φi为构件i(i=1,2,…,9)的角位移; β为主动平衡器与待平衡机构的装配角;mi、Ji和li分别为构件i的质量、转动惯量和长度;⊕表示构件的质心,ri和αi为质心参数;构件1和8为运动输入构件,Min1为作用在构件1上的输入扭矩, ω1为构件1的角速度分别为滑块8的位移、速度和加速度,F8为作用在其上的驱动力;构件10为与构件3相固连的负载盘,Mr为作用在其上的工作载荷。如图1c、图1d中所示建立坐标系,各运动构件的角位移φi、角速度角加速度及质心位移、速度和加速度在x、y方向的分量xsi、可通过运动学分析求得[8]。
待平衡机构和主动平衡器组成机构系统的总摆动力Fs可表示为待平衡机构和主动平衡器执行机构的摆动力在x、y方向的分量与之矢量和:

待平衡机构和主动平衡器组成机构系统相对于A点的总摆动力矩Ms为待平衡机构和附加的主动平衡器相对于A点的摆动力矩之和:
若以xk、yk,Rkx、Rky分别表示节点k的坐标及k(k=A,B,C,D,E,F,G,H)处运动副反力在x、y方向的分量,机构输入扭矩Min1和作用在滑块上的驱动力F8可通过动态静力分析的方法确定[8],以方案1为例,有:

2 设计方法描述
主动平衡器的平衡作用通过对其执行机构结构参数和控制输入运动规律的合理设计来实现,该设计过程通过优化方法来实现。为便于其柔性平衡作用的实现,将优化过程分为执行机构结构参数的优化设计和控制输入运动规律的优化设计两步进行。
2.1 执行机构结构参数的优化设计
进行4R1P机构结构参数的优化设计时,假定控制电机为零输入,即在滑块8静止的条件下,得出一组满足设计目标的常规四杆机构的结构参数。
同时考虑机构摆动力、摆动力矩和输入扭矩的平衡,由与以上指标相关的分目标函数f1(x)、f2(x)、f3(x),运用加权系数法合成总目标函数F1(x):
式中,w1、w2和w3为各子目标函数的权重,不同取值可满足不同侧重要求的平衡目标;和 Min1,RMS、Ms,RMS、Fs,RMS分别为待平衡机构及其与主动平衡器组成机构系统的输入扭矩、摆动力矩和摆动力的均方根值[8]。
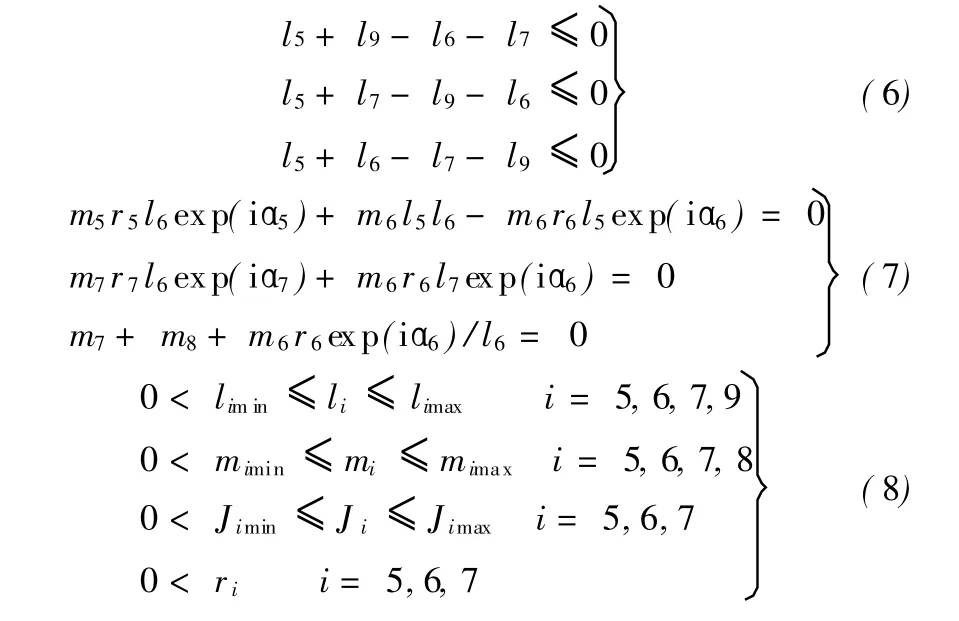
设计变量取4R1P机构各构件长度li(i=5, 6,7,9)、质量mi(i=5,6,7,8)、转动惯量Ji(i= 5,6,7)、质心位置参数ri(i=5,6,7)和αi(i=5, 6,7)及其与待平衡机构的装配角β:

约束条件为:①使构件5成为曲柄,各构件长度应满足杆长条件;②为保证主动平衡器自身摆动力平衡,其质量、质心参数和杆长应满足平衡条件;③各构件长度、质量、质心位置参数及转动惯量须满足相关边界条件。表述如下:
2.2 控制输入运动规律的优化设计
在结构参数设计的基础上,对控制输入构件滑块8的运动规律进行优化设计。为了减小控制电机的功率,将控制电机在一个周期内输出功率Pd的最大值Pdmax作为分目标函数f4(x),与前述分目标函数f1(x)、f2(x)、f3(x)运用加权系数法合成为总目标函数F2(x):

式中,w4为子目标函数f4(x)的权重;η为控制电机至滑块8的机械传动效率。
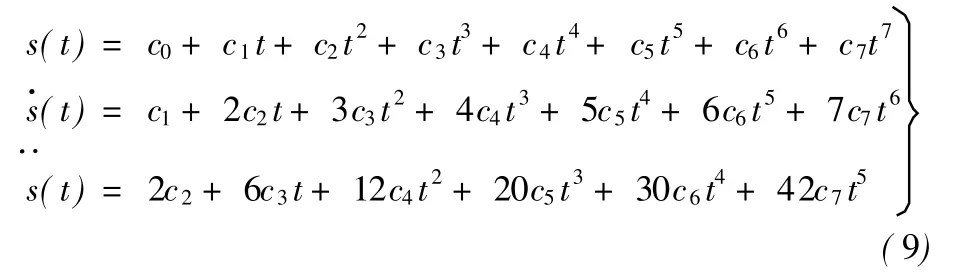
设计变量取为多项式运动规律中的系数c0、c1、c2、c3、c4、c5、c6、c7及滑块导路与x轴的夹角σ,即:

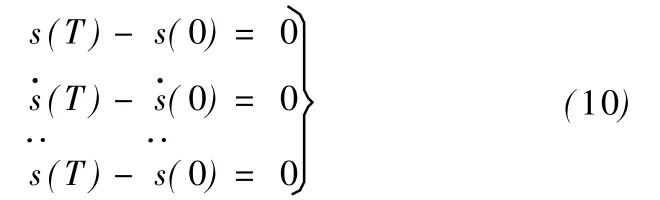
为使滑块8运动连续,在机构输入构件的一个运动周期T内,其运动函数应满足以下约束条件:
3 算例及讨论
本节以摆动力完全平衡的曲柄摇杆机构为待平衡机构(也称原始机构),分别采用前述方案1和方案2,在其上附加4R1P型主动平衡器,如图1c和图1d所示。假设曲柄1以60r/min的转速等速回转;与摇杆3相固连的惯性负载盘10质心位于摇杆转动中心D,两者转动惯量之和为J3,作用在其上的惯性负载待平衡机构分别在负载1(J3=0.010 kg·m2)和负载2(J3= 0.030 kg·m2)下工作,其结构参数及负载1、负载2下各动力指标的均方根值见表1。
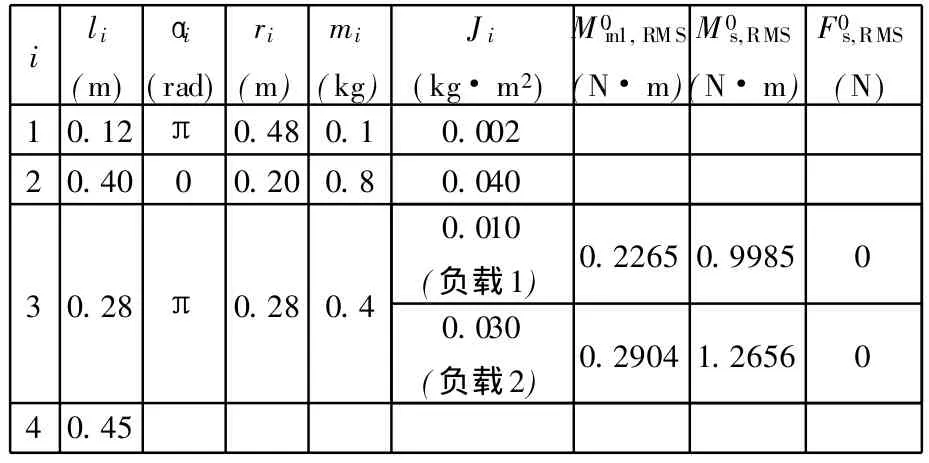
表1 待平衡机构的结构参数及附加主动平衡器前相关动力指标
在负载1和负载2下各设一组算例来说明和比较方案1和方案2的平衡效果及当负载发生变化时对机构动力性能的补偿作用。出于理论研究和实际应用的考虑,在主动平衡器结构参数优化设计中,设置两种设计变量取值范围L1(0.001≤li≤100,0.01≤mi≤10,0.0001≤Ji≤10)和L2(0.001≤li≤0.6,0.01≤mi≤1,0.0001≤Ji≤0.06),比较主动平衡器在尺度及质量等参数不受限和被限定在不大于待平衡机构相关参数两种情况下的平衡效果。
3.1 算例1
系统在负载1下工作。针对不同平衡目标,分别在L1和L2下采用序列二次规划法分两步对两种安装方案下4R1P型主动平衡器的结构参数(Step1)和控制输入运动规律(Step2)进行优化设计,得到不同平衡目标下机构动力指标的均方根值,如表2所示,原始机构及其附加主动平衡器后输入扭矩、摆动力矩和摆动力随曲柄转角φ1的变化曲线如图2~图5所示。
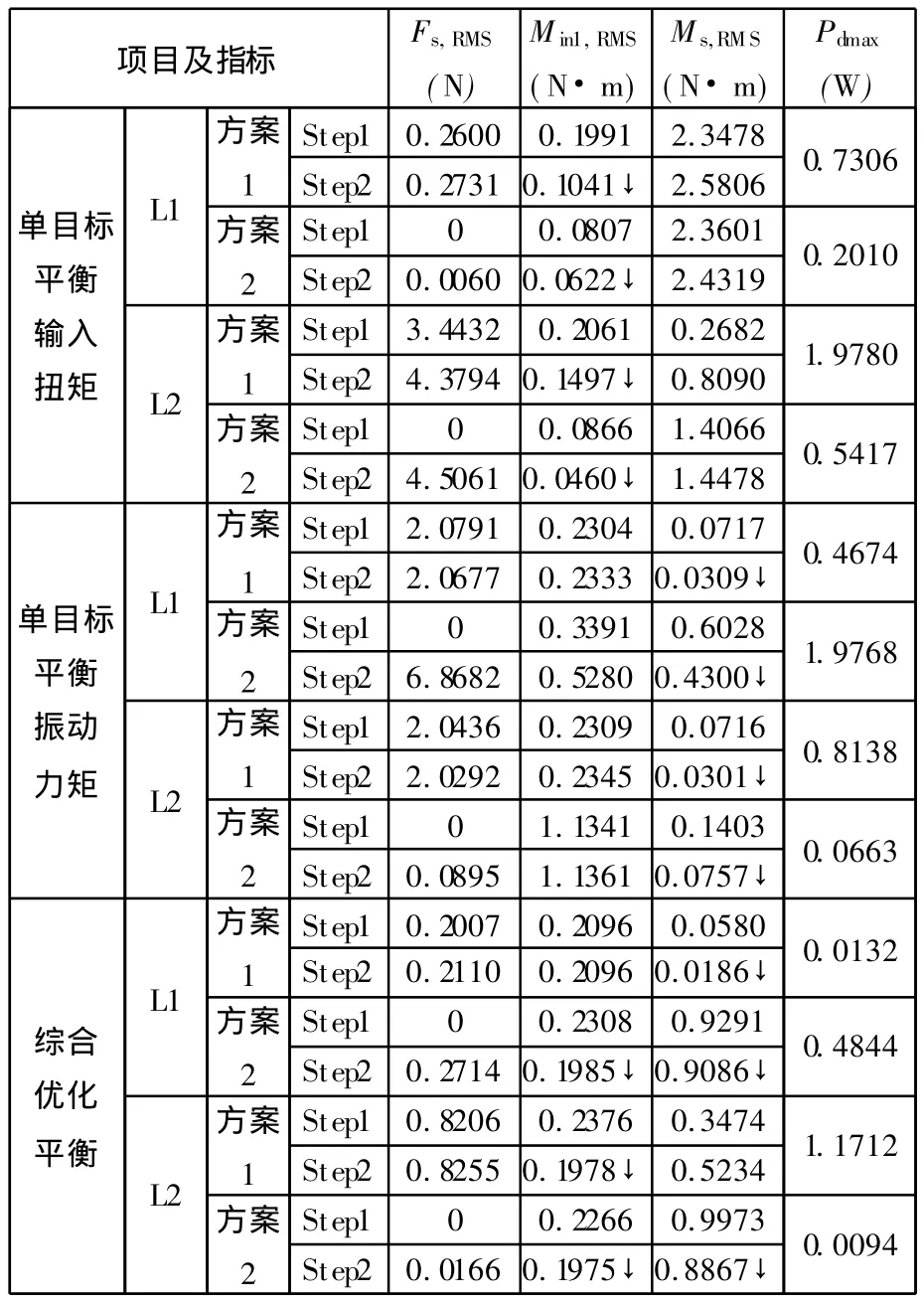
表2 附加4R1P型主动平衡器后机构动力性能比较
可以看出:①不论设计变量的取值范围是L1还是L2,4R1P型主动平衡器的平衡作用都是明显的,在L2下对某些指标的改善甚至更为显著。对于摆动力矩单目标平衡,方案1和方案2分别可使其均方根值Ms,RMS降低96.90%和58.42%(L1)及96.32%和92.42%(L2)。对于输入扭矩单目标平衡,方案1和方案2分别可使其均方根值Min1,RMS下降54.13%和72.54%(L1)及29.62%和79.69%(L2)。对于综合优化平衡,方案1和方案2在使Min1,RMS下降7.46%的同时,使Ms,RMS分别降低98.14%和9.76%(L1),在使Min1,RM S下降12.67%的同时,使Ms,RMS分别降低47.59%和11.20%(L2)。②从不同平衡目标下控制电机所需最大输出功率Pdmax来看,主动平衡器均能以较小的代价实现其柔性平衡作用。③尽管在L1下得出的设计结果中出现了个别结构参数比待平衡机构相应参数大很多的情况[8],但以上数据仍可说明主动平衡器在机构动力平衡方面的有效性。④不论单目标平衡,还是综合优化平衡,在完成主动平衡器结构参数设计后,通过对控制输入运动规律的优化设计可以进一步优化机构的各项动力指标,但进行某一指标的单目标平衡时会引起其他指标的恶化,这与以往的研究结果是一致的。
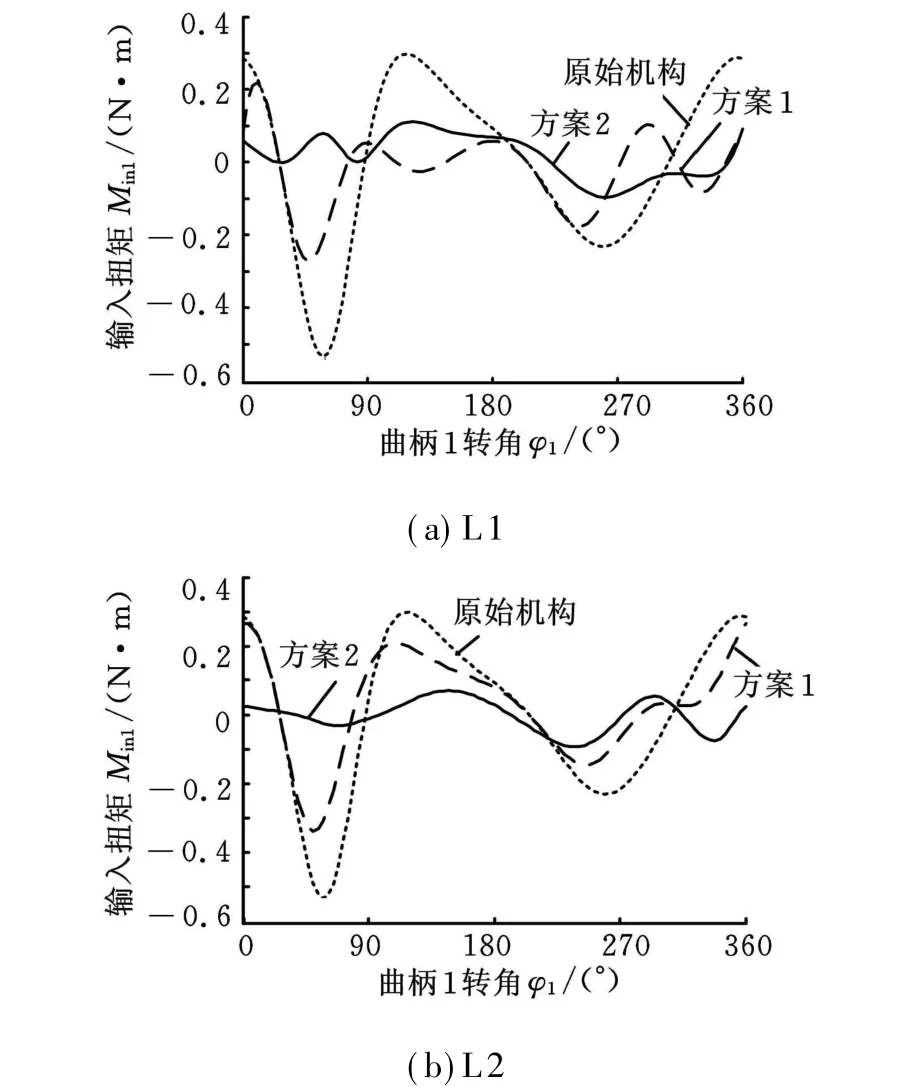
图2 附加4R1P型主动平衡器前后机构的输入扭矩比较(输入扭矩单目标平衡)
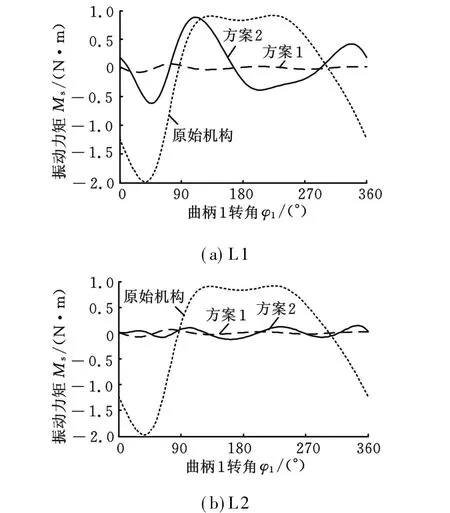
图3 附加4R1P型主动平衡器前后机构摆动力矩比较(摆动力矩单目标平衡)
3.2 算例2
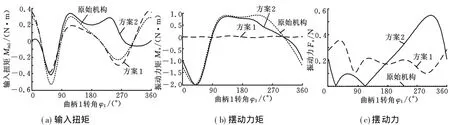
图4 附加4R1P型主动平衡器前后机构动力性能比较(综合优化平衡L1)
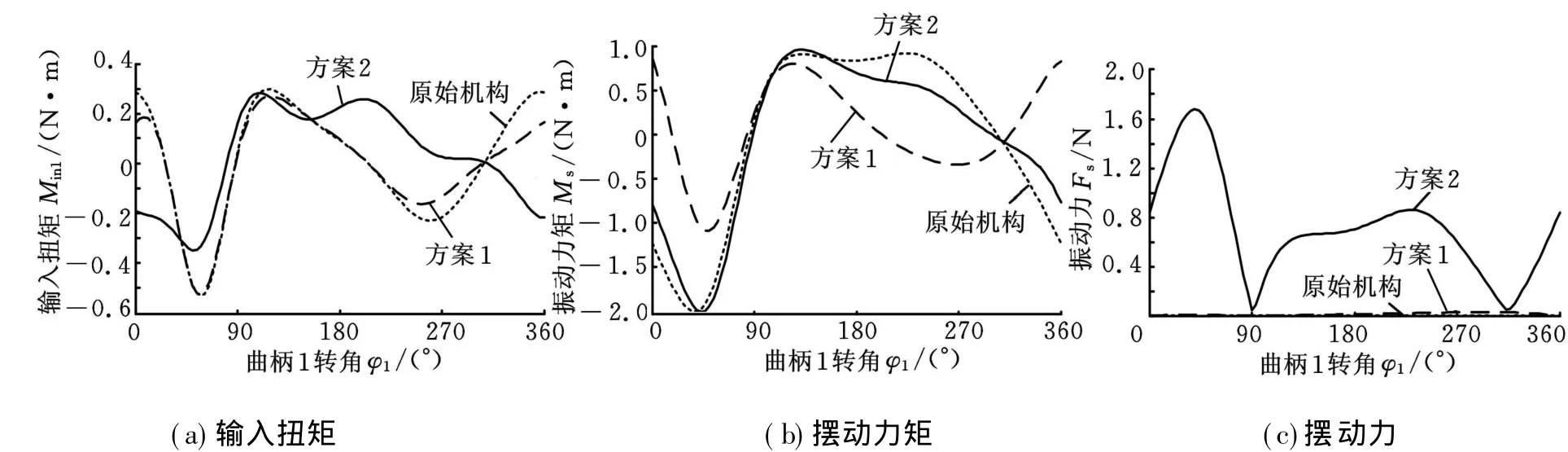
图5 附加4R1P型主动平衡器前后机构动力性能比较(综合优化平衡L2)
系统在负载2下工作,原始机构及附加主动平衡器机构系统各动力指标随负载变化情况见表1和表3。为了对机构动力性能进行补偿,分别在输入扭矩单目标平衡和摆动力矩单目标平衡两种情形下,重新设计主动平衡器控制输入运动规律,原始机构及补偿前后附加主动平衡器机构系统的输入扭矩和摆动力矩随曲柄1转角变化曲线如图6、图7所示,机构各动力指标的均方根值列于表3中。

表3 4R1P型主动平衡器对机构动力性能的补偿作用
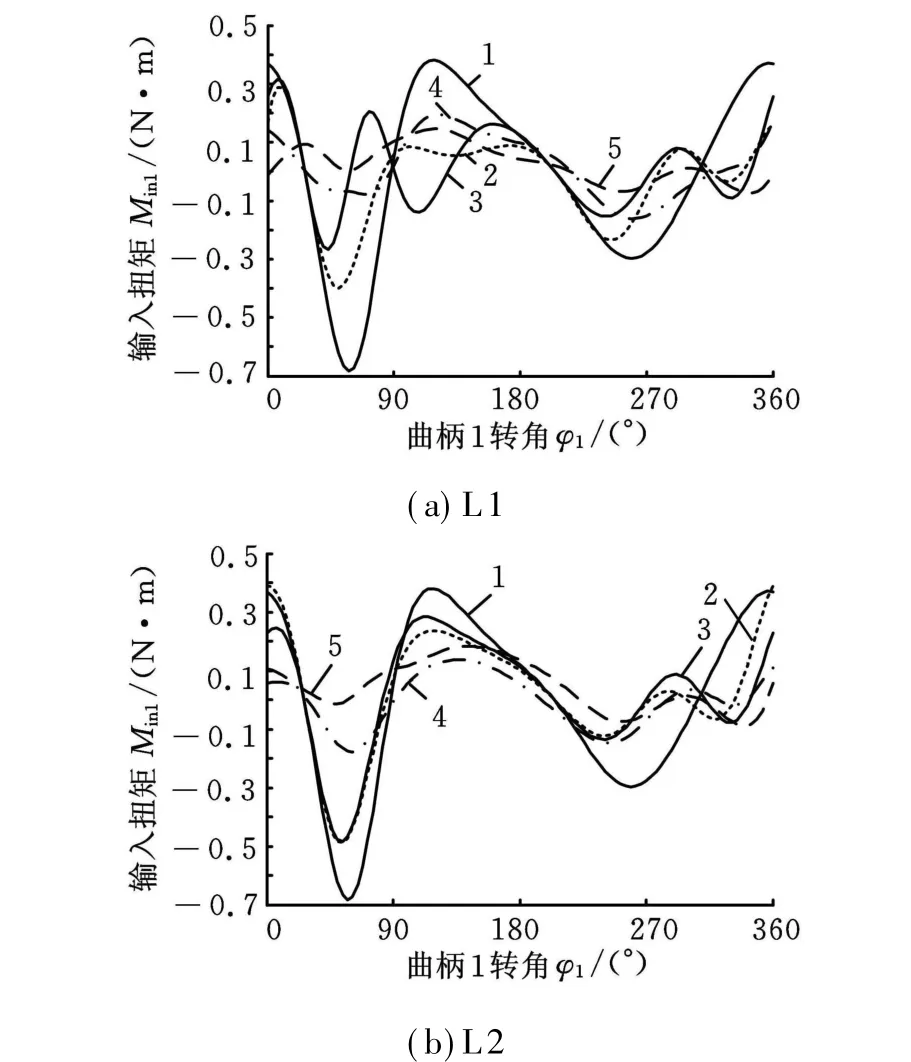
图6 主动平衡器对由负载改变引起的输入扭矩变化的补偿(单目标平衡输入扭矩)
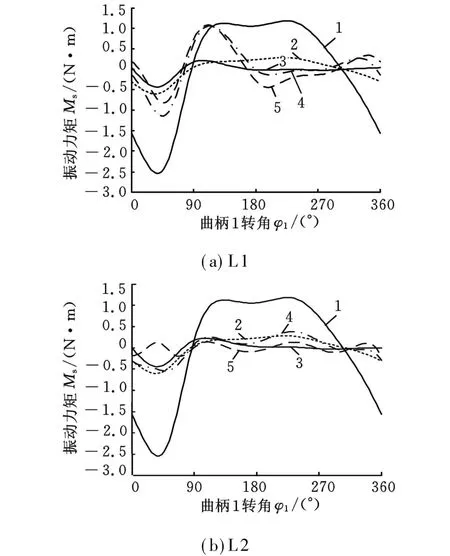
图7 主动平衡器对由负载改变引起的摆动力矩变化的补偿(单目标平衡摆动力矩)
可以看出,调整主动平衡器控制输入运动规律,可以在一定范围内补偿和改善因负载变化而引起的机构动力性能的变化:①对于摆动力矩单目标平衡,方案1和方案2分别可使Ms,RMS在补偿后降低44.40%和9.52%(L1)及41.12%和 64.51%(L2)。对于输入扭矩单目标平衡,方案1可使Min1,RM S在补偿后降低12.14%,采用方案2使Min1,RM S降低16.83%为所需Pdmax约为100W,降低33.94%时所需Pdmax增为211W(L1);采用方案1使Min1,RMS下降10%时所需Pdmax约为12W,下降18.91%时Pdmax增至390W,采用方案2补偿效果不佳(L2)。对于综合优化平衡,方案1可使Ms,RM S在补偿后降低14.40%(L1)和2.81%(L2),方案2可使Min1,RMS降低15.60% (L1)和12.72%(L2),其他两项指标变化则不大。②从不同平衡目标下对不同动力指标进行补偿时控制电机所需最大输出功率Pdmax来看,在上面列出的两种情况下,机构输入扭矩的进一步降低是以控制电机功率的剧增为代价的,在进行其他动力指标的补偿时,Pdmax虽然没有随着某项动力指标的下降而剧增,但也都有着不同程度的增加,因此,在平衡设计时,需要在两者之间寻求折中方案,达到以较小的代价获得最佳平衡效果的目的。
以上结果虽是以曲柄摇杆机构为待平衡机构获得的,对于其他不同类型的待平衡机构,主动平衡器相关参数的设计结果会因待平衡机构的不同而不同,但设计方法和平衡机理都是相同的。
4 结论
(1)4R1P型主动平衡器可以通过对其结构参数和控制参数的合理设计,来满足机构不同侧重要求的动力平衡,且当机构动力性能由于工况改变而发生变化时,可以通过调节其控制输入的运动规律来补偿和适应这种变化,因此具有一定的使用柔性和主动性。
(2)在4R1P型主动平衡器的两种安装方案中,将其加装在待平衡机构输出轴上的方案对于摆动力矩的平衡效果较好,而将其加在待平衡机构输入轴上的方案对于输入扭矩的平衡效果较好,可根据不同应用场合选用不同方案。
[1] Arakelian V H,Smith M R.Shaking Force and ShakingMomentBalancingofM echanisms:a Historical Review with New Examples[J].Trans. ASME,Journal of Mechanical Design,2005,127 (3):334-339.
[2] Demeulenaere B,Spaepen P,Schutter J D.Input Torque Balancing Using a Cam-based Centrifugal Pendulum:Design Procedure and Example[J]. Journal of Sound and Vibration,2005,283:1-20.
[3] Li Z.Sensitivity and Robustness of M echanism Balancing[J].Mechanism and Machine Theory, 1998,33(7):1045-1054.
[4] Yao Y A,Yan H S,Zou H J.Dynamic Design of VariableSpeedPlanarLinkages[J].Chinese Journal of Mechanical Engineering,2005,18(1): 51-54.
[5] Thuemmel T.Dynamic Balancing of Linkage by ActiveControlwithRedundantDrive[C]// Proceedings of the 9th IFToMM World Congress. Milan,1995:970-975.
[6] Yu Y Q,Lin J.Active Balancing of a Flexible Linkage with Redundant Drives[J].Trans.ASME,Journal of Mechanical Design,2003,125(3):119-123.
[7] Zhang Y,Yao Y A,Cha J Z.An Independent Active Balancer for Planar Mechanisms[J].Transactions of Canadian Society for Mechanical Engineering,2007,30 (2):167-190.
[8] 张英.平面机构的主动平衡研究[D].北京:北京交通大学,2007.
(编辑 袁兴玲)
Study on Design of a 4R1P-active Balancer
Zhang Ying Yao Yan,an Zha Jianzhong
Beijing Jiaotong Univercity,Beijing,100044
T H112
1004—132X(2010)10—1208—06
张 英,女,1967年生。北京交通大学机械与电子控制工程学院讲师、博士。主要研究方向为机构学、机械动力学和机电一体化。发表论文7篇。姚燕安,男,1972年生。北京交通大学机械与电子控制工程学院教授、博士研究生导师。查建中,男,1947年生。北京交通大学机械与电子控制工程学院教授、博士研究生导师。
2009—07—30
国家自然科学基金资助项目(50405004,50875018);国家自然科学基金资助重点项目(50335040)
猜你喜欢
客车技术与研究(2023年6期)2023-12-19 01:21:18
中国煤层气(2021年5期)2021-03-02 05:53:14
凿岩机械气动工具(2017年3期)2017-11-22 07:21:50
山东青年(2016年12期)2017-03-02 18:22:48
国际木业(2016年8期)2017-01-15 13:55:22
国际木业(2016年12期)2016-12-21 03:13:28
国际木业(2016年3期)2016-12-01 05:04:52
国际木业(2016年1期)2016-12-01 05:04:09
光学精密工程(2016年6期)2016-11-07 09:08:02
航天制造技术(2016年6期)2016-05-09 08:32:51
