
高速铁路轨检仪绝对测量方法应用研究
2010-09-04 08:25杨友涛孔延花孔书祥
铁道建筑 2010年12期
杨友涛,孔延花,孔书祥
(西南交通大学 峨眉校区,四川 峨眉山市 614202)
无砟轨道施工控制测量技术,特别是其中的无砟轨道精调及检验,已成为无砟轨道建设的关键技术之一。传统的轨道检测工具已不能满足无砟轨道测量精度要求,使用轨检仪测量轨道几何形位势在必行,这也是铁路检测工具现代化的重要标志之一。
1 轨检仪测量的基本原理
轨检仪是一种在无列车轮载作用时可检测静态轨道各项平顺性参数的便捷工具,且能够直接在轨道上手推行驶,因此,也被称为“轨检小车”。它采用电测传感器、专用便携式计算机等先进检测和数据处理设备,可检测轨距、水平、超高、正矢、轨向、高低、扭曲等轨道平顺性参数。按其测量方式主要分为相对轨检仪和绝对轨检仪。相对轨检仪是指在没有外部参考基准的情况下,轨检仪根据观测数据分析检测点间设计参数的相对变化,并进行轨道调整的一种轨道检测设备。绝对轨检仪是指在有外部参考基准的情况下,除了能够检测轨距、水平、超高、正矢、轨向、高低、扭曲外,还能够确定线路里程及轨道中心点绝对位置的一种轨道检测设备。
无砟轨道精调或检测要依靠CPⅢ控制网进行,使用轨检仪和高精度全站仪联合工作,根据CPⅢ控制网进行定位,高精度、高密度的CPⅢ控制点可以可靠、精确地确定轨道坐标和方向。要实现轨道绝对位置的精确测量,前提条件是全站仪的高精度自由设站。根据线路两侧的CPⅢ控制点,使用自由设站三维边角后方交会法,进行全站仪的高精度自由设站。为了减小瞄准误差,选用具有自动照准和自动目标识别功能的Leica TCA系列或者Trimble S系列全站仪。同时,全站仪架设在轨道中心线上,利用小角度测量,使得横向误差最小。
全站仪自由设站完成后,即可进行轨道线形的绝对坐标测量和相对位置测量。测量时,让全站仪锁定轨检仪上的棱镜,使其随轨检仪的移动而实时进行观测,以获得棱镜的三维坐标,再结合轨道的设计参数以及倾角和轨距传感器的测量数据,利用线路中心坐标计算模型、轨道点对应线路中线点里程计算模型、平顺性参数计算模型与轨检仪坐标转换模型,就可测量或者计算当前轨道实测与理论的各项平顺性参数。
2 自由设站数据采集程序设计
2.1 GeoCOM基本原理
GeoCOM(地理数据通讯接口)技术,是一种应用开发接口,是瑞士徕卡公司为徕卡用户对TPS系列全站仪进行二次开发所提供的另一种形式的支持,它是基于RPC(美国SUN微软公司的远程调用协议)而建立的点对点通信协议。GeoCOM有两种接口方式:一种为高级函数接口方式,就是在C++或VB中直接使用普通的函数调用,这种方式只需简单地调用函数,所有的请求、应答和解码都封装在GeoCOM的函数中,但其缺点是一旦其函数被调用,将会独占计算机的CPU时间,在实际工程应用中显得有些慢;另一种为低级的ASCⅡ接口方式,由请求和应答构成,即计算机应用程序通过串行线发送一个请求到测量机器人,等候应答并对应答解码。远程的测量机器人中有可以调用的过程,且每个过程都对应着一个唯一的标示码,每一标示码又与一个特定的请求(包括隐含的参数)相联系,这样可以通过发送ASCⅡ请求,并得到ASCⅡ应答的方式来控制测量机器人,此方式在实际应用中运行起来要比高级函数接口方式快的多。
2.2 自动观测程序设计
基于智能型全站仪的自由设站自动观测程序,是为高速铁路轨检仪绝对位置的数据采集而设计的外业观测自动化软件。自动观测程序可通过轨检仪上的工控机发送和接受指令来控制智能型全站仪,按设定参数自动完成半测回或多测回CPⅢ控制点的数据采集。

图1 轨检仪自由设站测量原理示意
设站时,每个测量区间选择8个CPⅢ控制点,完成全站仪的自由设站,其自由设站测量原理如图1所示。首先,人工照准8个CPⅢ控制点中的任意两个,进行学习测量;其次,由学习的两个CPⅢ控制点的观测数据,按三维后方交会的方法计算测站点的近似坐标;再次,数据采集软件根据选择的8个CPⅢ控制点的已知三维坐标,控制全站仪对CPⅢ控制点进行半测回的边角自动测量;最后,根据测量的CPⅢ控制点观测数据水平方向、天顶距和斜距,进行自由设站三维严密平差计算和精度评定,从而确定自由设站点的三维平差坐标及其精度。自由设站的精度,可以通过平差后的点位中误差进行判断。同时根据观测量改正数,剔除观测质量不佳的观测值,重新计算,以使自由设站点位中误差达到要求。自动观测程序的流程图如图2所示。
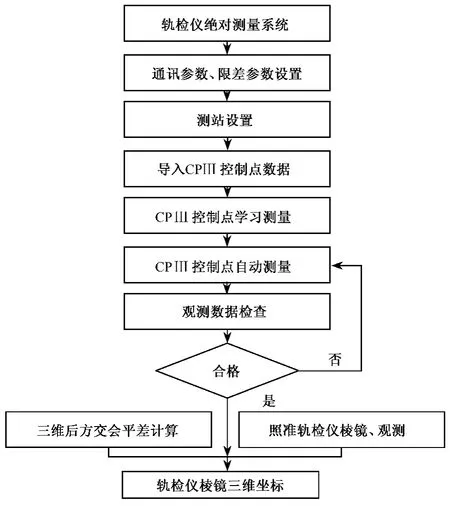
图2 轨检仪三维坐标采集程序流程
3 自由设站三维严密平差
3.1 观测值误差方程
3.1.1 斜距误差方程
斜距观测值S及其改正数vS与其测站点坐标XS,YS,ZS及照准点 CPⅢ坐标 Xi,Yi,Zi,可直接建立以下的关系式

式中,测站坐标未知数 XS,YS,ZS,可用其坐标近似值,,及改正数dx,dy,dz代入,自由设站中照准点CPⅢ坐标为已知量。因dx,dy,dz为微小量,按泰勒公式展开并略去dx,dy,dz的二次及以上的各项,得斜距误差方程式

3.1.2 水平方向误差方程
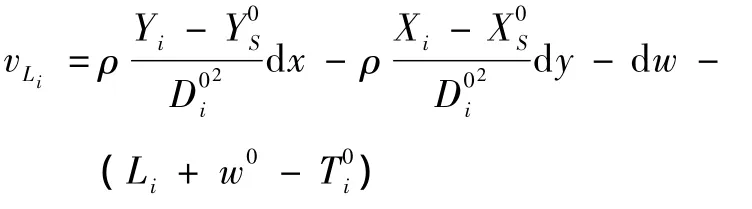
水平方向观测值L及其改正数vL与未知点坐标,通过坐标方位角T建立如下关系

式中,w=w0+dw是自由设站上整组方向平差值所共有的定向角,定向角近似值w0可按下式进行计算

水平方向观测方程同样按泰勒公式展开,得水平方向误差方程
1.推行法律服务工作机制,实现社区与职工群众和谐共处。如今企业职工的思想观念呈现多元化趋势。为解决职工思想观念和日常工作生活中的主要问题,企业必须要依法履行管理服务职责,要站在规范理顺职工维权行为的角度,完善职工普法工作规划及企业法律服务工作相关规定、法律服务工作考核细则,抓好法制宣传教育阵地建设,做到法律服务和日常管理服务工作同部署、同运行、同考核。同时,企业可通过聘请资深法律专家召开专题法律讲座、开设法律服务专栏、定期组织开展“阳光咨询”活动和区域法律座谈咨询会等形式,面对面解疑释惑,多渠道宣传法律知识,增强职工依法办事、依法维权的意识和法律服务的针对性和实效性。
式中,ρ=205 265″。
3.1.3 天顶距误差方程
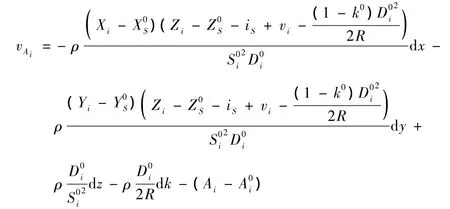
天顶距观测值A及其改正数vA,与其测站点坐标XS,YS,ZS及照准点 CPⅢ坐标 Xi,Yi,Zi,满足以下关系式

上式按泰勒公式展开,得天顶距误差方程
3.2 自由设站三维坐标平差计算
根据以上推导的观测量的误差方程,可计算出观测量误差方程的系数矩阵和系数矩阵,则误差方程的矩阵形式为

式中,n为观测的目标点个数;dX =[dx dy dz dw dk]T为未知参数向量。
按最小二乘原理,误差方程的解为

那么,可求得自由设站点的三维坐标为

其坐标中误差为

式中,Q=(BTPB)-1为坐标协因数阵;σ0为验后单位权方差。
3.3 轨检仪三维坐标计算
自由设站完成以后,转动全站仪照准轨检仪棱镜并锁定,进行实时测量。由以上平差计算得到的自由设站三维平差坐标、定向角和大气折光系数平差值,以及照准轨检仪棱镜的观测值,按下式即可计算轨检仪棱镜三维坐标
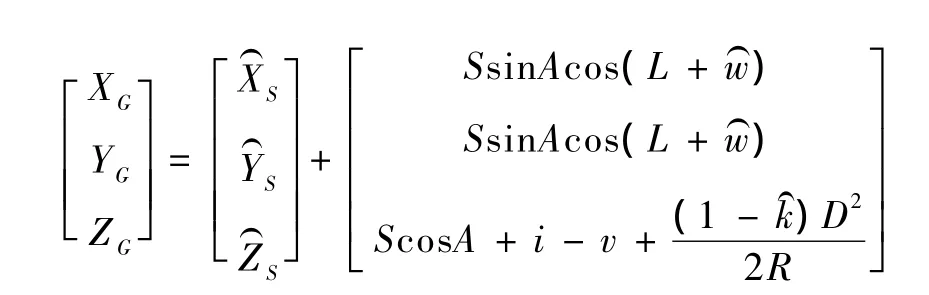
式中,XG,YG,ZG为轨检仪棱镜坐标;,,为测站平差坐标;S,A,L分别为仪器照准轨检仪时的观测量斜距、天顶距、水平方向;,分别为定向角和大气折光系数平差值。
4 结论与建议
1)高速铁路轨检仪通过程序实现了对CPⅢ控制点自动测量,测量过程中减少了人为观测误差,提高了观测精度,同时也提高了测量的效率。
2)本文对轨检仪绝对坐标计算中,加入大气折光改正,其大气折光系数是通过自由设站三维平差计算所得,计算方法更严密。在轨检仪测量过程中,轨检仪不宜超出CPⅢ控制点所包围的线路范围,以免轨检仪高程位置误差较大。
3)本文研究的轨检仪绝对测量方法已经在中铁咨询与西南交通大学共同开发的轨检仪上应用,是轨检仪获得三维绝对坐标的关键技术。
[1]於宗俦,鲁林成.测量平差基础(增订本)[M].北京.测绘出版社,1978.
[2]万剑华,高希余.工程三维网中关于确定或消除折光影响方法的探讨[J].测绘通报,1994(4):11-14.
[3]张忠良,杨友涛,刘成龙.轨道精调中后方交会点三维严密平差方法研究[J].铁道工程学报,2008(5):33-36.
猜你喜欢
矿产勘查(2020年1期)2020-12-28
空间科学学报(2020年6期)2020-07-21
水电站设计(2020年4期)2020-07-16
空间科学学报(2020年6期)2020-01-08
环球时报(2019-12-05)2019-12-05
工程与建设(2019年3期)2019-10-10
北京航空航天大学学报(2017年4期)2017-11-23
中国工程咨询(2017年12期)2017-01-31
电测与仪表(2016年9期)2016-04-12
安徽地质(2016年4期)2016-02-27
