
水声信道有效声速估计方法及空间特征分析
2010-09-03 11:57:18梁国龙林旺生
哈尔滨工程大学学报 2010年12期
梁国龙,林旺生,王 燕
(哈尔滨工程大学 水声技术实验室,黑龙江 哈尔滨 150001)
在水介质中关于声速的研究是最早的水声学定量研究.1827年,Colladon和 Sturm在日内瓦湖测定了声波在水中的传播速度,所得的结果接近现代的测量值[1].在水声测距和回声测深技术的推动下,随后一段时间有人较为精确地测定了海洋中的声速值[2-4].研究表明海洋中声速具有垂直分层性质,实际工程应用中往往给出声速随深度的变化,或者声速与深度的函数关系.然而更为广泛的应用在于海洋信道中任意两点间的声速获取,因为在将海洋中声传播时间转换为传播距离时都是需要精确的声速值[5-9].在短时间内通过试验测量任意两点间的声速是不方便和难以完成的,而且海洋环境的时变性使得测量值在测量完成后准确性大大降低.
国内外学者就水声信道的声速获取展开了研究.Vincent等在研究深海水声定位时,首次将海洋空间中任意两点间的声速定义为有效声速(effectivesound velocity,ESV)[10],并提出了有效声速的估计方法,但是此方法仅适用于直达波所在区域的有效声速的求解.孙万卿[11]提出了一种基于有穷状态自动机的有效声速估计方法,此方法虽然考虑了海面海底反射,但对海面反射考虑得不够充分,以小步长搜索时计算量甚大.某些特殊水文条件下,反射声较直达声先到时,两种算法均不能准确的给出有效声速.一般来说,要准确获取波达时延须对空间各个点计算声场,本文提出的获取办法避免了声场的计算,且确保了波达时延的准确获取.
1 有效声速
声信号自声源发出后沿不同路径到达空间某点,按照射线声学的观点,该点接收的信号是所有本征声线之和,每条声线都存在一个等效声速,所有等效声速构成一个等效声速集合 S,假设有 m条本征声线,则

式中第 j条本征声线的等效声速,即收发两者直线距离与第 j条声线传播时间的比值.
对于给定声速度分布函数 c(z),若点声源位于Ps(rs,zs)处,声速度为 cs,第 j条声线以初始掠射角θs出射,声线上的任意点 P(r,z)的声线传播轨迹和传播时间计算表达式为
这样到达接收点(r,z)的第 j条声线的等效声速即可求得

定义有效声速 ESV为声源与水听器之间的直线距离和声波从声源出发到水听器的传播时间的比值,即最早到达声线对应的等效声速,则

因此,要准确给出信道中某两点间的有效声速,需要搜索所有到达接收点的本征声线.需要指出的是:Vincent定义的有效声速[10]仅考虑了直达声抵达的路径;孙万卿定义的有效声速[11],虽然提到了其他途径的声线抵达,却是仅以海底一次反射为基本模型.
2 空间有效声速的估计
海洋和其边界包含着各种不均匀性,而这些不均匀性相对于声源或接收器以无规则的方式不断地运动着,因此要实时解析求得两点间的有效声速几乎是不可能的[12].这里假定海洋信道是缓变的,海洋中声速近似垂直分层[5-7,12],可以近似将其划分成多层恒定梯度介质的连接,每个分层为折线的声速分布来替代连续变化的声速分布.忽略海洋中其他随机影响,在分层介质和海洋边界影响下,有效声速的求取只能是一种近似的估计.
搜索出从声源出发到空间所有接收点的所有本征声线其计算量是相当大的[9-11].从声源出发的声线是以不同初始掠射角向外行进的,对各条声线进行跟踪,当声线抵达接收点所在深度时,对该条声线进行分类并求取等效声速,再获取到达该接收点的最大等效声速,这样一次初始掠射角空间遍历就可以得到同一深度不同距离处的有效声速.本文提出的求解方法不着眼于本征声线的搜索,而是对不同初始掠射角声线空间遍历时进行有用信息提取.需要指出的是,在初始掠射角均匀变化时,声线抵达同一深度时,其水平距离是不均匀变化的,相当于对接收水听器所在空间的等效声速一个不等间隔的空间采样.而初始掠射角空间遍历完毕之后,获得各类抵达声线的等效声速空间采样率是不一致的,统一空间采样率可最终获得空间不同点有效声速.
空间有效声速的估计包括初始化基本参数、声线跟踪、同类声线等效声速求取和有效声速求取 4个过程,图1给出了求解算法的流程图.
初始化基本参数过程主要包括海洋环境参数的初始化、声速分布的分层量化和水听器空间采样范围及间隔的设定.
声线跟踪过程主要包括声线分类[10]和声线跟踪算法[9].用 sign(θ0)、RFS、RFB、RAS、RUS来描述初始掠射角符号、海面反射次数、海底反射次数、上反转次数和下反转次数,通过特征标志矢量[sign(θ0),RFS,RFB,RAS,RUS]对抵达声线进行分类.
声线跟踪算法主要实现对抵达声线等效声速的不等间隔空间采样.对每个初始掠射角为 θsj的声线跟踪时,当声线抵达设定的接收深度时,依特征标志矢量对抵达声线分类,而后依据式(4)计算等效声速,直至不满足海面海底筛选准则或抵达距离边界.具体来说,将海洋介质划分为 N层,初始掠射角为θsj,对应声速为 csj,声线行进到第 i层时,掠射角为θi,对应声速梯度为 gi,则
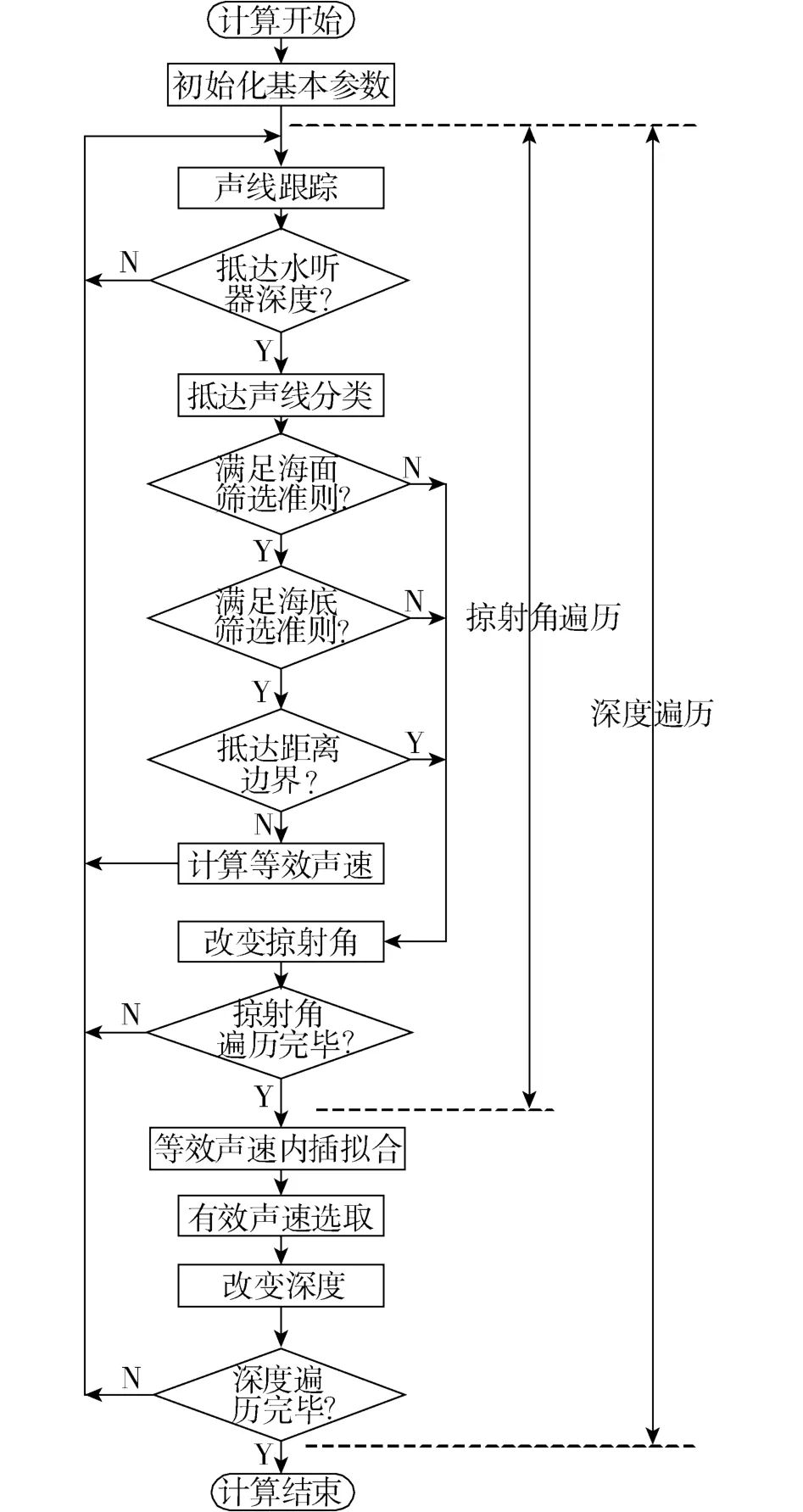
图1 空间有效声速求解的流程图Fig.1 The flowchartof special ESV
同类声线等效声速求取是在获得抵达声线等效声速的不等间隔空间采样后通过内插拟合对等效声速等间隔空间采样.最后根据式(5),通过比较各个空间采样点处各类抵达声线的等效声速获得有效声速.下文将给出在某海域实测水文条件下求解空间有效声速的实例.
3 空变特征分析
海洋及其边界的非均匀性导致有效声速的空变性,理论上推导得出的公式十分复杂,不便于分析.本文对 2种浅海环境进行仿真分析,探讨有效声速空间变化的一些基本规律.
第1种浅海海洋环境仿真条件如下:海深45m、海底底质密度 1.421 kg/m3、海底声速1 520m/s、海底基本平坦,水文为某海域实测水文,如图2所示,该水文为典型的跃变层水文.声源深 5 m,在接收水听器深度 Zr分别位于 20、30、40 m,声源距接收水听器的水平距离从 50~4 000m以步长 20m变化时,有效声速的空间变化规律如图3所示.
第 2种浅海环境仿真条件如下:海深 98 m、海底底质密度 1.421 kg/m3、海底声速 1 520m/s、海底基本平坦,水文为某海域实测水文,如图4所示,该水文为典型的带等温层的负梯度水文.声源深 5 m,接收水听器分别位于 20、30、40m深,声源距接收水听器的水平距离从 50~4 500 m以步长 20 m变化时,有效声速的空间变化规律如图5所示.

图2 声速分布 1Fig.2 Sound speed profile 1
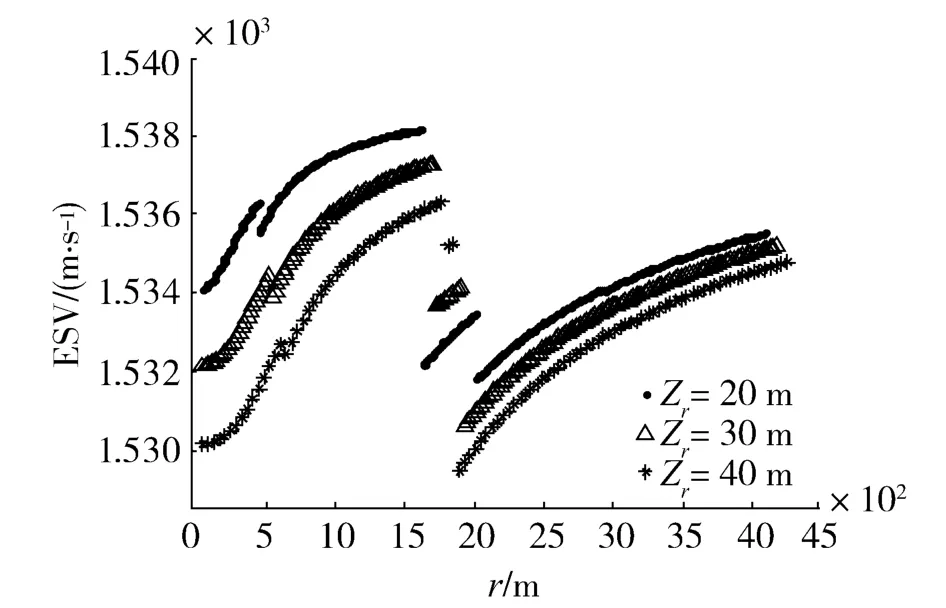
图3 第 1种浅海信道有效声速空间变化Fig.3 ESV for various space in shallowsound channel 1
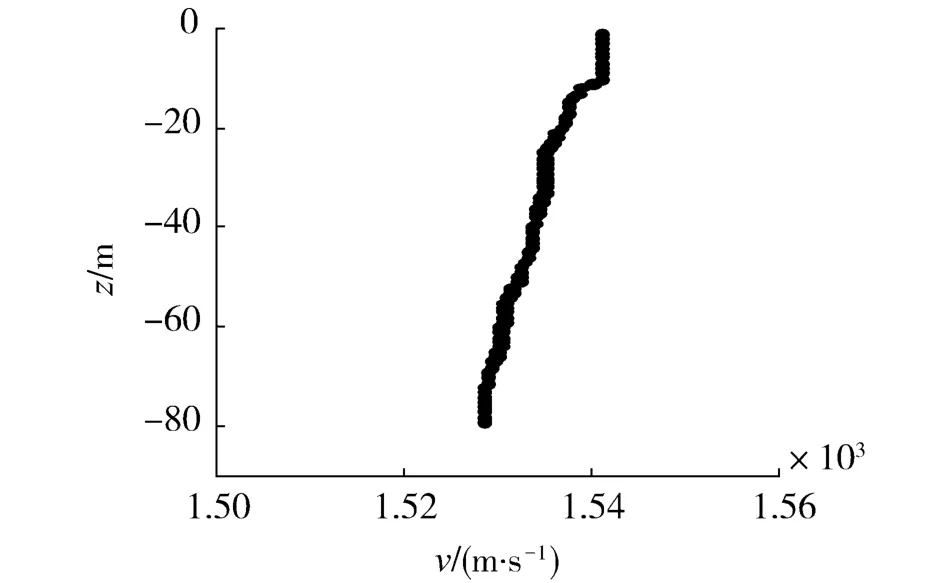
图4 声速分布 2Fig.4 Sound speed profile 2

图5 第 2种浅海信道有效声速空间变化Fig.5 ESV for various space in shallowsound channel 2
从上述仿真结果可以看到,接收水听器深度不变时,在同一类型声线抵达区域随水平距离增加声线相对弯曲程度减小,在高声速层行进的声程增大,有效声速在局部区域随距离的增加呈上升趋势.在不同水平距离处改变接收水听器深度,有效声速变化复杂,如仿真一接收水听器位于水平距离 1 700m处时,有效声速随深度增加而增加,水平距离2 500 m处时,反而随深度增加而减小.此外,随着水听器水平距离变化时,有效声速会产生跃变,跃变点出现的距离与水听器深度有关.
4 海试结果分析
2009年 4月在南海某水域进行了有效声速空间变化特性的相关试验.试验时换能器通过试验船海底门伸入水下,发射周期单频脉冲信号,试验船实时记录换能器精确的水平位置,布放的 3个智能浮标检测声信号并将检测时延值及自身位置信息实时通过无线电传至监控船.试验船发射换能器正上方安装了高精度差分 GPS,且试验船升降机构上安装的高精度罗经和方位姿态仪,可测量试验船的摆动引起换能器位置的偏离,保证其水平定位精度标准差在 0.3 m以内.
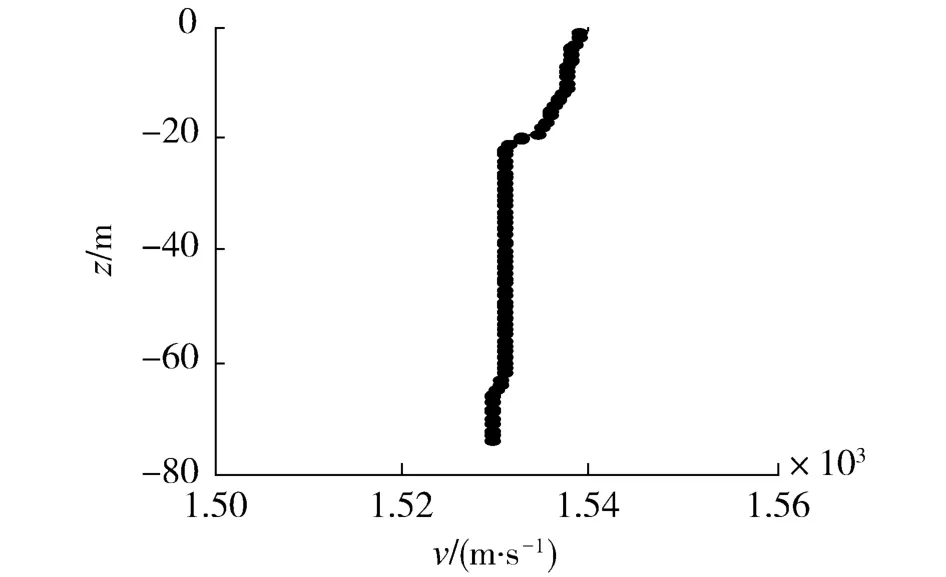
图6 声速分布 3Fig.6 Sound speed profile 3
试验条件:试验海区水深 90m,海况 2级,海底较平坦,试验船航速 6 kn,换能器声头深度7.32m,系统同步周期 1.6 s,布放 12#,13#,23#号浮标,浮标水听器位于水下 30m,试验测量水文示于图6.试验的工作态势图示于图7,各个浮标的时延测量结果图示于图8.
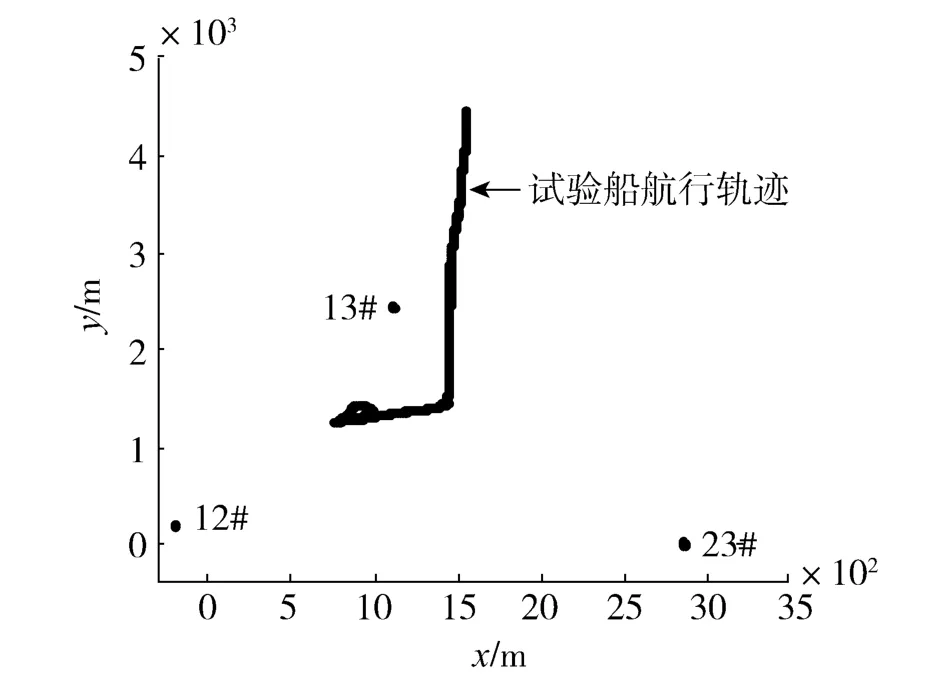
图7 试验工作态势Fig.7 Work situation of trial

图8 测量时延值Fig.8 Themeasurement results of time delay
在上述条件下对不同水平距离的有效声速进行了估计.图9给出了各类抵达声线等效声速图.表1列出了各条抵达声线对应的标志矢量.图10给出了有效声速随距离变化图.观察图9、10可以看到,由于声源与水听器位于水域上层,有效声速在整个水平区域内明显的分成了 3个区域:1)区域 1,水平距离从 0~1 500 m,此段区域中最早抵达声线是直达声或海面一次反射声;2)区域 2,水平距离从 1 500~3 500 m,此段区域中最早抵达声线至少经过一次海面和一次海底反射了,在 3 000~3 500m区域,最早抵达的声线经过两次海面反射和一次海底反射;3)区域 3,水平距离从 3 500~4 800 m,此段区域中最早抵达的声线经过 1次海面反射和2次海底反射.
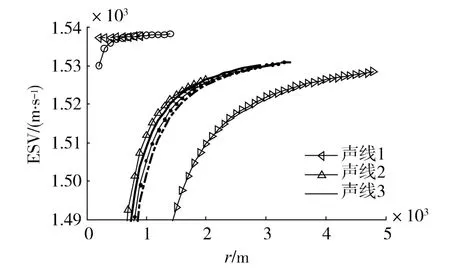
图9 各类抵达声线的等效声速Fig.9 The equivalent sound velocity of arrival ray

表1 抵达声线标志矢量Table 1 The symbolic vector of arrival ray
根据实际测量数据计算出的有效声速结果示于图11.声源距 13#浮标距离介于 500~2 000 m之间,与 12#、23#浮标距离重合的区域有效声速基本一致;12#、23#浮标距声源 3 700m以内时有效声速一致,而在超过 3 700m时二者产生了明显的差异,主要是由 2个浮标与声源在中远距离处地形不一致产生的.

图10 有效声速随距离变化仿真结果Fig.10 The simulation results of ESV for various distance
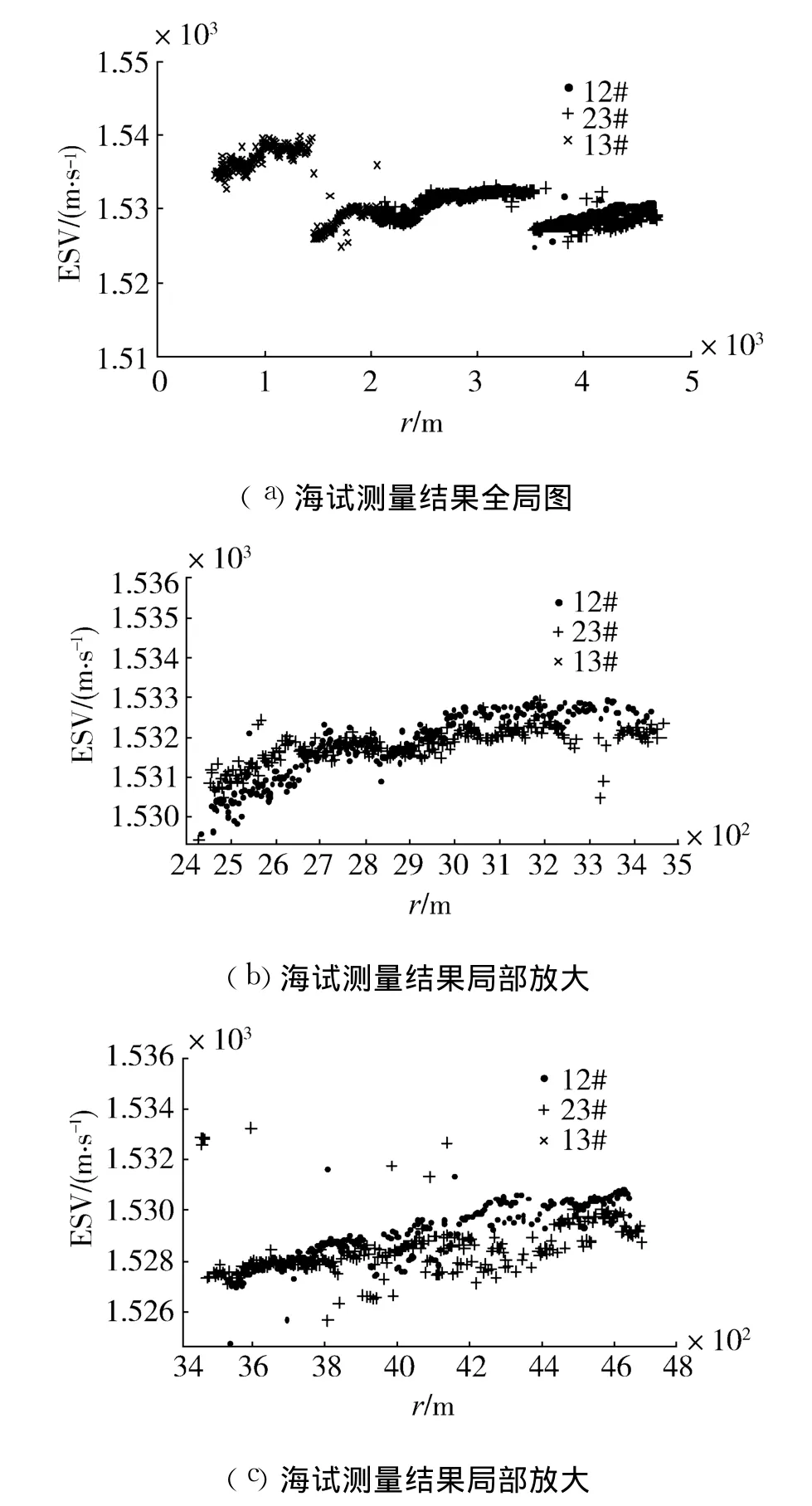
图11 有效声速随距离变化海试测量结果Fig.11 The experimental resu lts of ESV for various distance
比较仿真结果与实测结果可以看出:在第 1区域和第 2区域二者十分吻合,而在第 3区域,声线经过了 2次海底反射才抵达接收点,海底地形的不确定性导致了二者在数值上的微小差异.一次的海底反射,地形小的变化影响不是很大;在经过 2次海底反射后,地形的变化产生的影响较明显.
5 结论
通过本文对效声速的研究可知:
1)浅海信道有效声速直接受声线抵达结构影响,在声线抵达结构突变区,有效声速会产生跃变;在同一类型声线抵达区域相对变化缓慢,负梯度水文下,区域内有效声速会随水平距离增加而增加.浅海信道波导垂直小尺度影响下,有效声速随深度变化较为复杂,值得进一步研究.
2)对于近程直达声所在区域,有效声速估计不受边界影响,中远程受海底影响较大,海面次之.小的波浪对有效声速的估计影响不大.对浅海信道中远距离有效声速的准确估计更重要的是与海底的地形匹配.
关于有效声速空间变化的基本变化规律及其估计方法,对水声测距、水声定位和长基线系统阵元位置规划具有重要的意义.
[1]WOOD A B.A textbook of sound[M].NewYork:Macmillan Co,1941:413.
[2]GARRISON G R,KIRKLAND pC.Long range measurements of sound speed in sea water[J].J Acoust Soc Am,1961,33(2):360.
[3]URICK R J.Sound propagation in the sea[M].NewYork:Peninsula Publishing,1982:50-53.
[4]SPIESBERGER J L,METZGER K.A newalgorithmfor sound speed in sea water[J].J Acoust Soc Am,1991,89(6):2677-2688.
[5]邢志刚,封金星,刘伯胜.水声测距数学模型研究[J].哈尔滨工程大学学报,2000,21(3):24-28.XING Zhigang,FENG Jinxing,LIU Bosheng.Study of range mathematical model by underwater acoustics[J].Journalof Harbin Engineering University,2000,21(3):24-28.
[6]齐娜,田坦.多波束条带测深中的声线跟踪技术[J].哈尔滨工程大学学报,2003,24(3):245-248.QINa,TIAN Tan.Ray tracing in multi-beamSwath bathymetry[J].Journal of Harbin Engineering University,2003,24(3):245-248.
[7]王燕,梁国龙.一种适用于长基线水声定位系统的声线修正方法[J].哈尔滨工程大学学报,2002,23(5):32-34.WANG Yan,LIANG Guolong.Correction of sound velocity in long baseline acoustic positioning system[J].Journal of Harbin Engineering University,2002,23(5):32-34.
[8]LEROY CC,ROBINSON S P,Goldsmith mJ.A newequation for the accurate calculation of sound speed in all oceans[J].JAcoust Soc Am,2008,124(5):2774-2882.
[9]林旺生.水声信道仿真与声线修正技术研究[D].哈尔滨:哈尔滨工程大学,2009:28-31.LIN Wangsheng.Research on underwater sound channel simulation and sound ray revision[D].Harbin:Harbin Engineering University,2009:28-31.
[10]VINCENT H T.Models,algorithms and measurement for underwater acoustic positioning[D].Rhode Island:University of Rhode Island,2001:1-5.
[11]孙万卿.浅海水声定位技术及应用研究[D].青岛:中国海洋大学,2007:69-101.SUNWanqing.Studies on underwater acoustic localization technique in shallowwater and its application[D].Qing Dao:China Ocean University,2007:69-101.
[12]范敏毅.水下声信道的仿真与应用研究[D].哈尔滨:哈尔滨工程大学,2000:15-38.FAN Minyi.A study on simulation&application of underwater sound channel[D].Harbin:Harbin Engineering University,2000:15-38.
猜你喜欢
中国水利水电科学研究院学报(2023年1期)2023-03-14 04:57:18
电声技术(2022年3期)2022-04-28 00:22:50
高技术通讯(2022年12期)2022-03-23 07:33:24
声学技术(2020年6期)2021-01-08 08:31:54
探测与控制学报(2020年4期)2020-09-02 07:52:44
应用科技(2020年1期)2020-06-18 02:02:36
测井技术(2018年5期)2018-12-26 12:03:28
优雅(2017年3期)2017-03-09 17:02:52
沈阳工业大学学报(2016年2期)2016-09-15 02:00:54
声学技术(2014年1期)2014-06-21 06:56:34
- 哈尔滨工程大学学报的其它文章
- 中国保险业进入IT产业风险投资领域研究