
基于控制分配的多操纵面战斗机重构控制研究及应用
2010-08-24 06:11朱心中刘春生
东南大学学报(自然科学版) 2010年1期
朱心中 刘春生
(南京航空航天大学自动化学院,南京 210016)
现代飞机大多采用多操纵面布局,增加了飞行控制系统的控制冗余,提高了飞机的控制能力.控制分配技术是在考虑操纵面偏转位置约束前提下,将控制指令以最优的目标分配到各个操纵面上,以确保飞行器的稳定性和机动性.控制分配应用于飞行控制系统中,可以将控制器的设计分成2个相对独立的部分;在飞机出现作动器故障或操纵面损伤的情形下,可以通过控制重分配实现重构,而无需调整控制率,因此基于控制分配的重构控制对提高飞机的安全性、生存力有着重要意义[1-2].
控制分配算法可以分为两大类:基于优化的分配法和非优化的分配法.基于优化的方法主要包括广义逆法和基于线性规划的直接几何方法,以及数学规划法;非优化控制方法主要包括直接几何法和串接链控制分配法.广义逆法主要包括伪逆法、加权伪逆法以及所谓最优的广义逆分配方法,它的基本思想是在控制无约束的情况下,对期望运动的广义逆求解并对解进行优化;数学规划法中,传统的二次规划法是在工程应用中比较成熟的一种方法,该方法可以灵活利用代价函数和约束条件,实现控制分配任务,虽然该方法能够很好地解决正常系统的控制分配问题,但是不能够很好地完成故障系统控制分配任务.传统的重构算法主要是在FDD机构发现并确定出故障后,在线进行系统控制律的重构:胡寿松教授针对一类非线性系统提出了一种自组织模糊小脑模型神经网络的自适应重构控制方法,用于鲁棒故障自修复控制;有人通过设计故障检测滤波器进行了故障检测,并采用故障的有效因子和激励重构技术进行了控制律的重构设计,保证故障前后系统具有相同的特征值;还有的是采用基于强跟踪滤波器的自适应一般模型控制技术研究了非线性系统的主动重构设计方法;还有的利用干扰解耦理论研究了执行器失效后系统的控制问题,提出了一种控制结构重构的方法.本文基于控制分配在解决故障系统问题的优点和二次规划法的控制分配算法缺陷,提出了一种基于加权最小二乘法的控制分配算法的重构控制方法,该方法充分考虑了系统控制冗余特性,在系统出现严重故障问题时,能够很好地完成控制分配任务,保证系统的良好性能.
1 重构控制分配问题描述
考虑多输入多输出(MIMO)线性时不变系统:
式中,Bu∈Rn×m(m>n);x∈Rn为系统的状态变量;u∈Rm为控制输入.假设:1)系统可控;2)状态变量x均可测量得到;3)rank(Bu)=k<m.
控制输入矩阵可以被分解为Bu=BvB,则式(1)转化为˙x=Ax+Bvv.其中,虚拟指令v通常代表俯仰、滚转和偏航3个方向力矩(l=3,m>l),m是作动器的数量;控制输入u为各作动器的位置指令;由于系统的动态特性通常要比作动器的动态特性慢很多,所以可忽略作动器的动态特性[3],也就是作动器的位置指令等于各操纵面的偏转,即v=Bu,umin≤u≤umax.其中,B为控制分配矩阵,umin为作动器的位置下限,umax为作动器的位置上限.求作动器偏转u.如果多解,则取最优的解;若无解则取使得v最接近的作动器偏转.
控制重构的目标是利用飞行控制系统的反馈信号估计飞机的故障,然后完成重构控制任务,以便能够维持飞机期望的稳定性能.重构控制系统一般包括4个部分(见图1):重构控制器(包括飞行控制率模块和控制分配模块)、故障对象、FDI模块和重构控制机制模块.故障通常主要包括作动器、传感器的故障等.
目前多操纵面战斗机飞行控制系统重构控制的研究主要是对飞行控制率直接进行重构,而没有充分考虑多操纵面的控制冗余特性,本文提出了一种新的基于加权最小二乘(WLS)控制分配算法的重构控制方法.
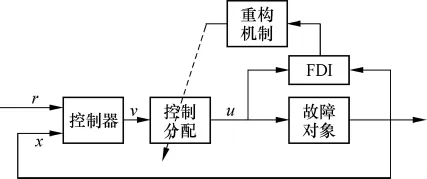
图1 重构控制系统结构图
2 基于LQR理论的基本控制器设计
本节利用最优LQR理论[4]设计基本控制器,其输出即虚拟指令,将它作为控制分配模块的输入.针对系统(1)选择性能指标:

式中,x(t)∈Rn;v(t)∈R3,且无约束;矩阵A,B,Q和R为维数适当的常阵,且Q和R分别为非负定和正定对称矩阵.
假定阵对{A,Bv}完全可控,阵对{A,D}完全可观,DDT=Q,D任意.求解Riccati方程:ATP+PA+Q-,则最优状态反馈增益:.为了保证系统输出跟踪参考输入指令,引入前馈增益,由此可得基本控制率为

式中,v(t)为伪控制指令,为控制分配器提供输入指令;r为参考输入指令.系统方程变为˙x=(A+BvKx)x+BvKFr;当假定条件成立时,系统显然是大范围渐进稳定的.
3 基于加权最小二乘法的控制分配算法
选择二次范数来评价解的优劣或解的接近程度.加权最小二乘法将l2最优控制分配问题的求解转化为:.其中,umin≤u≤umax,期望操纵面偏转ud取为零,以期取得最小阻力;权重矩阵Wv,Wu均为正定对角矩阵.
利用加权最小二乘法可以将控制分为2个部分:自由集和作用集.使用自由集的伪逆解来更新这些集计算,参数μ由起作用集反映.由于基于加权最小二乘法的控制分配算法是基于起作用集算法的,所以同样具有起作用集方法所具有的优点:能高效求解小到中规模的二次规划问题.
基于加权最小二乘法控制分配算法[5]如下:
①设置W为先前采样时刻的起作用指标集,并合理初始值u0.
②优化目标函数可写为:


可以利用该算法求解前面的式子,从而得到控制指令u.
4 重构控制策略
考虑线性系统(1),当作动器出现故障时,故障战斗机的线性模型可以表示为

式中,BF为新的控制输入矩阵,BF=BuK,控制效率阵[6]K=diag(k1,k2,…,km).
在各操纵面均完好时,ki表示第i个正常作动器.ki=0表示第i个作动器完全失去作用;ki=1表示第i个作动器工作正常;0<ki<1表示第i个作动器部分损坏.只要K阵已知或在线被估计出来,就可利用控制分配技术,比如调节基于二次规划法的最优控制分配算法中的权重矩阵[7],解决多操纵面战斗机故障问题.
假设故障信息ki已通过机载FDI系统获得.设系统性能指标J:

式中,Wu=diag(W11,W22,…,Wmm)为可调正定对角矩阵,Wv为固定对角矩阵;μ较小,且T远远大于1;若ki减小,则对应 ui会显著减小是第 i个作动器工作正常时对应权重矩阵值.
5 仿真验证及结果分析
将提出的加权最小二乘(WLS)控制分配算法的重构控制方法应用于多操纵面战斗机ADMIRE进行仿真验证.ADMIRE多操纵面战斗机在3 000 m高度,以0.22 Ma速度平飞条件下的线性状态空间模型[8]可表示为
式中,系统矩阵A、输入矩阵Bu和输出矩阵C见文献[8].
Bu=BvB,Bv=v(t)=Kxr+KFx(t).r为参考输入指令,r=[αd,βd,pd]T,其中,αd为迎角指令;βd为侧滑角指令;pd为滚转角速度指令.
设置权重矩阵分别为:Wv=diag([1 10 100]);Wu=diag([1 1 10 10 10 10 10]).
考虑以下故障情形:右外升降副翼损坏90%和左内升降副翼损坏90%.
图2是右外升降副翼损坏90%和左内升降副翼损坏90%时,正常和重构2种情形下系统输出响应的比较,以及2种情形下系统输出响应对参考输入的跟踪效果比较.仿真结果表明:应用基于控制分配的控制律设计能够较好地解决多操纵面综合分配与协调操纵问题,系统输出可以快速跟踪期望信号,提高了飞机的可靠性和安全性.

图2 正常和重构后的系统输出响应曲线
图3是右外升降副翼损坏90%和左内升降副翼损坏90%时,正常飞行和飞机发生故障后重构后的飞机各个操纵面的偏转对比.仿真结果表明:右外升降副翼和左内升降副翼几乎不被使用,减少了已严重损伤的操纵面使用,加大了对左外升降副翼和右内升降副翼使用,以抵消右外升降副翼和左内升降副翼损坏所带来的不利影响,从而保证飞机能够良好的跟踪参考输入指令.
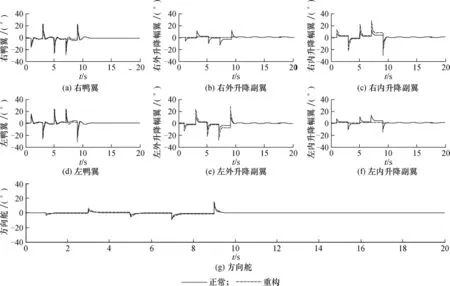
图3 正常和重构后各操纵面偏转结果
6 结语
本文提出了一种新的基于加权最小二乘控制分配算法的重构控制方法.该方法充分考虑了多操纵面战斗机的控制冗余特性,可以在战斗机操纵面出现严重损伤等故障时,迅速降低对已损坏操纵面的使用,加大对剩余正常操纵面的使用.仿真表明,该重构方法应用到飞机控制系统设计中能够解决战斗机在线故障问题,并且重构后各操纵面的组合协调、合理,显著提升了战斗机安全可靠性,具有较好的工程应用价值.
References)
[1]杨恩泉,高金源.先进战斗机控制分配方法研究进展[J].飞行力学,2005,23(3):1-4.Yang Enquan,Gao Jinyuan.Research and development on advanced fighter control allocation methods[J].Flight Dynamics,2005,23(3):1-4.(in Chinese)
[2]马建军,李文强,李鹏,等.飞行器控制分配技术研究现状与展望[J].飞行力学,2009,27(3):572-576.Ma Jianjun,Li Wenqiang,Li Peng,et al.Status and future of control allocation for aerospace vehicle[J].Flight Dynamics,2009,27(3):572-576.(in Chinese)
[3]陈怀民,徐奎,马松辉,等.控制分配技术在无尾飞机纵向控制系统中的应用研究[J].西北工业大学学报,2007,25(2):199-203.Chen Huanimin,Xu Kui,Ma Songhui,et al.Control allocation in longitudinal control system of tailless UAV [J].Journal of Northwestern Polytechnical University,2007,25(2):199-203.(in Chinese)
[4]胡寿松,王执铨,胡维礼.最优控制理论与系统[M].北京:科学出版社,2005.
[5] Harkegard Ola.Efficient active set algorithms for solving constrained least square problems in aircraft control allocation[C]//Proceedings of the 41st IEEE Conference on Decision and Control.Las Vegas,NV,USA,2002:1295-1300.
[6] Zhang Youmin,Suresh V Sivasubramaniam,Jiang Bin,et al.Reconfigurable control allocation against aircraft control effectors failures[C]//Proceedings of the 16th IEEE International Conference on Control Application.Singapore,2007:1197-1202.
[7] Hodel A S,Callahan R.Autonomous reconfigurable control allocation(ARCA)for reusable launch vehicles[C]//Proc of AIAA Guidance,Navigation,and Control Conf.Monterey,CA,USA,2002:AIAA-2002-4777.
[8] Swedish Defense Research Agency(FOI).Aerodata model in research environment(ADMIRE),version 3.4h[R].Sweden:Swedish Defense Research Agency(FOI),2003.
猜你喜欢
智能制造(2021年4期)2021-11-04
民用飞机设计与研究(2020年1期)2020-05-21
测控技术(2018年5期)2018-12-09
测控技术(2018年11期)2018-12-07
北京航空航天大学学报(2017年3期)2017-11-23
西安航空学院学报(2017年3期)2017-07-05
北京航空航天大学学报(2016年2期)2016-12-01
电信科学(2016年10期)2016-11-23
中国科技信息(2016年14期)2016-07-31
科技传播(2015年20期)2015-03-25
