
火箭助推无人机起飞发射段建模与仿真
2010-08-24 06:11肖前贵胡寿松
东南大学学报(自然科学版) 2010年1期
李 浩 肖前贵 胡寿松
(1南京航空航天大学自动化学院,南京 210016)
(2南京航空航天大学无人机研究院,南京 210016)
随着无人机(UAV)在战场环境获取信息的优越性、高作战效费比以及自主式精确打击等方面表现日益突出,其成为当今各国武器装备的发展重点.不同型号的无人机大小、重量、任务要求不同,这决定了无人机的发射方式有很多种.最简单的是源于航模的“手抛发射”,这种方式很实用,但仅适用于重量相对较轻的飞行器,这类飞行器载重量低,动力适当.同样简便的是普通的轮式发射,但需要一块平整好的场地并要小心翼翼地控制飞行的航向[1].最通用也是最成功的发射方法之一是火箭助推发射,无人机安装在零长发射装置上,在助推火箭推力的作用下飞离发射装置,助推火箭在很短的时间内向无人机提供大量的机械能,使其在火箭脱落前达到保证无人机安全飞行的高度和速度,之后由机上发动机完成飞行任务.
火箭助推发射起飞方式占地面积小,前期投入低,受环境条件影响小,可以很好的满足快速、机动等战场要求[2-3],本文中的无人机正是采用这种发射方式.但是,在实地的操作中,火箭助推发射时需要考虑的因素较多,主要为气动参数、控制系统参数、火箭安装参数等方面[4].如果这些参数选择不当,很容易导致发射过程的失败.
针对上述问题,本文在理论上对无人机火箭助推发射过程中无人机的受力情况进行了详尽的分析与计算,然后结合Matlab/Simulink等工具箱完成了该型无人机发射段数字仿真系统的搭建.
1 参数定义
本文坐标轴系采用英美坐标系,其中机体坐标系定义[5]为:原点O取在无人机质心处,坐标系与无人机固连;X轴在无人机对称平面内并平行于无人机的设计轴线指向机头;Y轴垂直于无人机对称面指向机身右侧;Z轴在无人机对称平面内,与X轴垂直并指向机身下方.无人机相对于地球的姿态定义为欧拉角ψ,θ,φ.图1给出了无人机所受外力/力矩(Fx,Fy,Fz,L,M,N)及其相对于机体坐标系的线速度和角速度(u,v,w,p,q,r).助推火箭推力作用点在机体坐标轴系的坐标为(prx,pry,prz),发动机推力线到质心的距离为rp.σ,η分别为火箭轴线在机体坐标系OXBYB面内投影与OXB的夹角和在机体坐标系OXBZB面内投影与OZB的夹角.
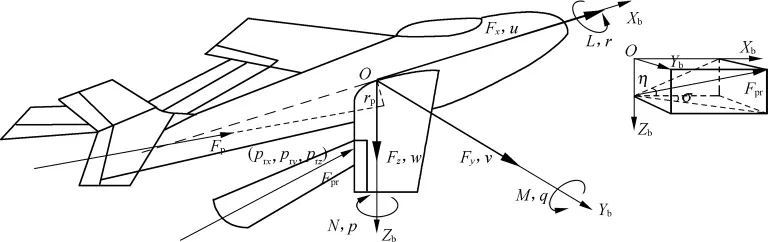
图1 机体坐标系下外力/力矩及参数定义
2 在轨滑行和火箭助推阶段受力分析
火箭助推阶段无人机的动力学模型总体上分为3个阶段:在轨滑行阶段、脱离发射架到助推结束阶段、助推火箭脱落阶段.
无人机火箭助推发射所需考虑的因素众多,如果在仿真中均加以考虑,将使仿真系统非常复杂,须有重点地进行研究.根据无人机系统实际的结构和运动的情况把无人机系统(发射车、机体、火箭等)简化为几个刚体组成的系统[6].本文重点研究火箭脱落过程,故将在轨滑行阶段和脱离发射架到助推结束无人机受力情况进行简化处理.
2.1 在轨滑行阶段

将各力沿机体坐标轴分解,则

式中,TW→B,TE→B为气流坐标系和地面坐标系到机体坐标系的转换矩阵[5].
对无人机质心求力矩并分解在机体坐标系上


式中,x=[V,α,β,p,q,r,ψ,θ,φ,xe,ye,H]T为无人机的状态变量;ua为升降舵、副翼舵、方向舵的偏转输入;p1为一个多项式向量函数,它产生无量纲的气动力和力矩系数;矩阵d1,d2将无量纲的系数转化为有量纲的力和力矩[7].

式中,动压qdyn=ρV2/2;S为机翼面积;b为翼展;c¯为平均气动力弦长.式(5)中计算的气动力力矩已沿机体轴分解,无需转换是沿气流坐标系给出的,需通过坐标转换矩阵TW→B将其换算至机体轴坐标系.
发动机的推力Fp是无人机飞行高度、速度的函数关系,其多项式系数可通过发动机台架试验获得.针对本文研究对象,取发动机的安装角为零,推力线到质心距离为rp.机体坐标系中发动机推力及推力矩为

由于2个助推火箭对称安装,故其在OXbYb面内的合力几乎为零,故本文中将2个火箭的推力合并为一个在OXbZb平面内的力.则矢径,助推火箭对无人机的力和力矩为

2.2 火箭助推阶段
无人机所受合力及力矩为

在本阶段,无人机受力情况与前一阶段相比少了滑轨的作用力和力矩,各力与力矩的计算方法同2.1节.
3 助推火箭脱落阶段受力分析
本文中的助推火箭与无人机采用锥体、锥窝对接接头连接方式,当拖尾段推力还未完全消失时,在重力和气动力作用下,助推火箭自动分离,分离时间非常短暂.实际试飞中,在助推火箭点火约3.3~3.5 s后,火箭完成脱落.
助推火箭脱落阶段,无人机所受合力及力矩为

助推火箭安装支座上的锥台安装位置为D点,火箭的质心为C点,火箭长度为l,质量为m,C点与D点的距离为h,火箭沿D点的转动惯量Jc=ml2/12.α为火箭脱落时绕支点D转动的角加速度,Fur是D点对火箭的作用力,δ为助推火箭脱落时火箭轴线与地垂线的夹角(见图2).火箭脱落时运动视为刚体平面运动,其运动可以分解为沿接触点的下移和转动.
由刚体的平面运动微分方程得

解得Fur=mgl2sinδ/(12h2+l2),即为助推火箭脱落时,锥台对火箭的作用力.
η′=δ+θ,其中η为助推火箭对锥台的作用力Fru与机体坐标系X轴的夹角.将Fru沿机体轴分解,
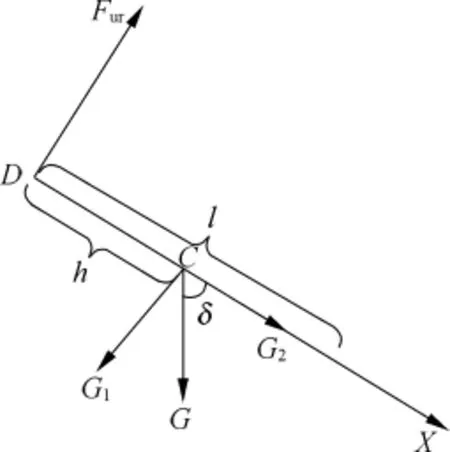
图2 助推火箭脱落时锥台受力分析图

助推火箭通过一个锥台与无人机相连,锥台的底面半径为r,圆锥纵向剖面三角形的顶角为μ,助推火箭推力 作用 点 D 在 机 体 坐 标系 中 的坐 标 为[Prx0 Prz],则 Fru作 用 点 的 坐 标 为

4 仿真结果
为验证模型的有效性,在Matlab/Simulink平台上进行了仿真,仿真给定初始值俯仰角为15°,质量为2 060 kg,仿真时间为5 s.仿真结果如图3所示.由图3可见:
1)火箭在离轨后俯仰角角度变化较大,这是由于在无人机离轨瞬间,导轨的作用力突然消失,由于惯性作用,无人机产生一定的抬头力矩;在2~3 s时间内,助推火箭力矩大于发动机推力力矩,无人机俯仰角减小;3.5 s后,在气动力矩与发动机推力力矩共同作用下,最终使无人机的俯仰角稳定在给定值.
2)火箭助推发射段纵向姿态与无人机实际试飞数据曲线相比,基本符合,表明该修正模型能够反映无人机在发射段的运动学和动力学特性,模型可信.
3)由速度、高度的变化来看,虽然发射段俯仰角变化较大,但由于在无人机离轨时飞行速度还很低,气动力/力矩作用可以忽略,舵面效率基本不存在,要确保无人机安全发射,必须在发射前调整好助推火箭的安装角.

图3 火箭助推发射段纵向状态变化曲线
5 结语
无人机火箭助推发射方式应用范围还会扩大.一个完整且有实用价值的无人机发射段仿真系统是一个非常复杂的系统.本文建立了一个相对比较简单的模型,考虑了无人机的几个关键技术,对今后的无人机发射控制方案研究有一定的参考价值.
References)
[1] Fahlstrom Paul G,Gleason Thomas J.Introduction to UAV systems[M].3rd ed.Columbia:UAV System Inc.,2009:220-235.
[2]Moffitt B A,Bradley T H,Parekh D E,et al.Design and performance validation of a fuel cell unmanned aerial vehicle[C]//44th AIAA Aerospace Sciences Meeting and Exhibit.Reno,Nevada,2006:AIAA2006-823.
[3]Geisler Robert L,Moore Thomas L,Rohrbaugh Eric M.Unlocking the mystery of the D-21B solid rocket boosted airlaunched mach-3 UAV [C]//43rd AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit.Cincinnati,OH,USA,2007:AIAA2007-5761.
[4]陈怦.无人机发射过程仿真与参数敏感性分析[J].飞行力学,2002,20(1):21-24.Chen Peng.Simulation of unmanned air vehicle launching process and its sensitivity analysis[J].Flight Dynamics,2002,20(1):21-24.(in Chinese)
[5]Cook M.Flight dynamics principles[M].Butterworth-Heinemann,2005:12-30.
[6] Zhao Huiwen,Bil Cees,Yoon Bok-Hyun.Ducted fan VTOL UAV simulation in preliminary design[C]//9th AIAA Aviation Technology,Integration,and Operations Conference.2009:AIAA2009-7097.
[7]高艳辉.基于嵌入式实时Linux的无人机半物理仿真平台研究[D].南京:南京航空航天大学,2007.
猜你喜欢
上海人大月刊(2022年5期)2022-05-19
北京航空航天大学学报(2020年3期)2021-01-14
中国公路(2017年14期)2017-09-26
中国公路(2017年11期)2017-07-31
北京航空航天大学学报(2017年11期)2017-04-23
山东青年(2016年12期)2017-03-02
光学精密工程(2016年6期)2016-11-07
航天制造技术(2016年6期)2016-05-09
探测与控制学报(2015年4期)2015-12-15
中国铁道科学(2014年1期)2014-06-21
