多无人机搜寻有源目标模拟实验控制系统的研究
2010-08-23 08:33李恒宇谢少荣
制造业自动化 2010年3期
童 金,李恒宇,罗 均,谢少荣
TONG Jin, LI Heng-yu, LUO Jun, XIE Shao-rong
(上海大学 机电工程与自动化学院,上海 200072)
0 引言
无人机(UAV, unmanned air vehicles)具备能够在危险,复杂的未知区域环境执行相关任务,在军用及民用上广泛的应用前景[1,2]。同时,多无人机协同执行任务及相关研究逐渐成为无人机研究的一种趋势[3~5]。
无人机的空中优势,能够适用于快速对地面目标的搜寻定位。而测向交叉定位系统具有全方位、能够快速较远、在受到干扰的情况下仍能正常工作等优点。在目标测向交叉定位方面,目前国内外主要的研究集中在实现多个传感器的合理布局以提高定位精度问题[1,4]。多无人机协同控制方面,目前国内外研究主要集中在编队控制,多机协同任务和路径规划[2,6]。在上述研究基础上,我们提出采用基于提高定位精度的导航算法来实现无人机的搜寻算法的研究,具体研究集中在导航算法采用地上无人机器人上实现。为了验证所提出搜寻方法的合理性,基于两个自主行进机器人,设计开发了一套模拟搜寻控制系统,并进行了相关实验。
1 多机搜寻有源目标的原理
多无人机搜寻主要基于无人飞行机器人自主飞行基础上,通过导航控制飞行机器人,寻找目标并予以定位[3,5]。为了能够模拟空中飞行搜寻目实验,本文将无人机搜寻系统简化。假设无人机执行搜寻任务时飞行高度可以忽略,将三维的搜寻定位系统转化为二维平面搜寻定位系统。假设测量角度误差是零均值的高斯白噪声,具体如图1所示,无人机A与无人机B在不同位置对目标T进行定位。

图1 多无人机搜寻目标示意简图
其中目标定位误差区域为[8]:

本文所提出的搜寻定位过程,主要分为全局搜索、逼近目标和定位目标三个阶段:
全局目标搜寻阶段,首先无人机在通讯范围的允许下,与搜寻边界及友机之间拉开最大距离,最大化搜寻区域;其次,无人机尽可能直线飞行来减小转向所带来的能量额外损耗,增加执行任务时间;同时,无人机尽可能小的搜寻整个系统已经搜寻过的区域。各个无人机在搜寻同时不断计算下一个搜寻点,对飞机进行导航。一旦有目标信号出现,立刻进入第二阶段。
逼近目标阶段,当接收到目标产生的信号,测向设备向机器人系统反馈测向信号。同时机器人等待接收友机发出的测向数据,结合收集到的数据采用交叉定位原理对目标进行定位[3];基于目标定位误差区域最小化来导航机器人,同时以最小的转向半径飞向最后目标估计位置。
无人机逼近的导航代价函数如下:

其中d1为飞机到最近的友机的距离,d2为飞机到估算目标位置,Φ为飞机的转弯半径,P为飞机的转弯需要的离散点数量。
定位目标:当无人机收到友机发出目标测向相关数据之后,这时候定位系统进入协调定位阶段。通过前面提到的交叉定位及卡尔曼滤波理论来对多路测向数据进行融合,对目标信号位置进行最优估计,并计算定位精度[2,7]。同时,通过机器人的无线通讯设备将目标定位相关数据发送回地面控制系统。

图2 搜寻系统的模拟实验平台
2 实验平台设计
2.1 试验系统的硬件组成部分
地面实验平台如图2所示,主要由具备自主行进能力的机器人(两辆),信号发生器,测向设备,通讯设备,地面控制系统组成。
该实验系统的硬件结构如图3所示。

图3 试验系统硬件结构图
2.1.1 MCU
机器人系统,要求其易扩展其他硬件设备,同时具备较强的处理能力来实现复杂的算法。因此采用基于工业PC架构的开放式机器人,该机器人处理器是AMD3000+,集成Windows XP操作系统和VC开发环境,最大化的使用硬件软件资源,同时易于获取广泛的驱动支持。
2.1.2 运动控制模块
系统的运动控制器是完全基于PC架构的开放式控制器。用户可以通过运动控制卡(基于TMS320 F2812 DSP的控制卡)实时控制机器人运动和实时获取编码器的数据。利用实时获取的编码器数据可以进行精确的PID运动控制算法对运动进行反馈控制。由于采用了USB接口,用户可以方便的扩展出多轴运动控制。通过MCU给DSP运动板卡发出指令,能精确的控制机器人行走。
2.1.3 避障模块
由于机器人搜寻区域环境的未知不确定性,同时为了机器人系统相互能够更好的执行任务,我们给机器人加装了避障模块,在本文实验是通过加装声纳模块与PSD(Position Sensitive Detector)模块。声纳测距模块,来测定机器人周围障碍物距离(前,左,右),声纳的探测距离是41cm到7m,测量精度是+/-5%,测量频率是20Hz。配备的PSD模块来实现80cm内障碍测量,PSD测量范围是10-80cm,测量精度是+/-8%,测量频率是100HZ。
2.1.4 通讯模块
多无人机之间相互协调工作的前提就是通过建立一个通讯组网,能够实现机器人之间,机器人与基地之间,实时,大数据量的数据交互。通过给系统机器人及基地各加装XStream-PKG系列的无线数据传输模块,900MHz,具备最远32km的传输距离,通过配置可以给多机器人组建立一个通讯组网数据链,实现多机器人之间的相互通讯。
2.1.5 导航模块
搜寻系统通过算法修改机器人航向,机器人实时状态数据消息则通过GPS及电子罗盘,编码器获取。GPS模块,采用GARMIN的12通道GPS,差分模式下具备小于5m的定位精度。通过串口向机器人系统发出GPS数据。电子罗盘,使用的是Honeywell的HMR3000,通过RS232串口通信,向机器人输出航向,航向精度0.5°,分辨率为0.1°。机器人系统运动状态可以通过运动控制模块从编码器获得,多路状态数据,在本实验中,采用卡尔曼滤波方法对机器人运动数据进行融合。
2.1.6 测向模块
在具备自主导航行进能力机器人上,为了能够使机器人系统进行搜寻定位目标,我们给机器人加装了测向装置。机器人能够对有源目标发出的信号进行方向测量,来用于机器人对目标进行逐步定位,从而也不断给予机器人搜寻导航。测向装置的测向误差是+/-1°,由于实验区域范围我们假定在范围之内进行,因此低精度的测向设备完全满足我们实验定位精度要求。
2.1.7 地面控制模块
地面控制模块(基地系统)通过安装无线数据链,与机器建立通讯组网,实时监控并接收机器人发回来的数据,供系统进行决策。同时系统通过通讯组网向机器人发出任务执行及其它命令,供机器人执行。
2.2 实验系统的软件系统
由于机器人系统是基于PC机平台来实现运动控制及与外设的数据处理,我们通过VC++来实现相关控制算法代码的编写。系统软件流程图如图4所示。

图4 搜寻系统的软件图
通过上面的流程图,我们采用VC6.0进行相关控制软件编写。通过串口读取测向设备目标方向数据及测向误差。在搜寻系统初始化后,机器人等待基地系统发出指令,开始搜寻目标。在搜寻目标同时,机器人等待基地系统发出结束任务指令,实现机器人回收任务。在搜寻到目标之后,通过与友机器人进行通讯得到友机的测向数据,通过UKF最优估计理论进行数据融合计算出目标[3],然后通过无线传输数据链传输模块将数据发送给基地系统。
3 实验结果及其分析
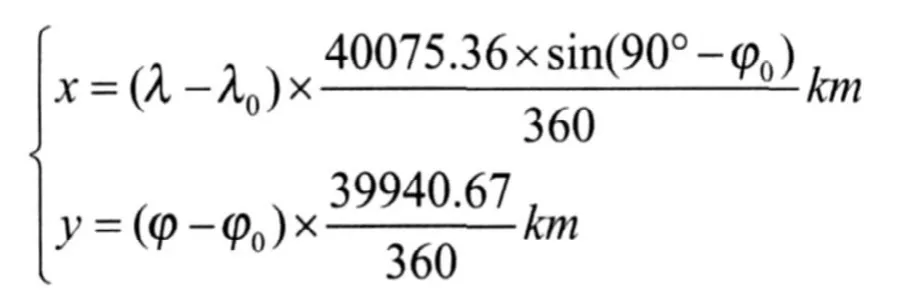
考虑到无人机器人的实验过程的航程较短(一般小于50m),为了简便,此时可以把小范围的地球看作平面,故本项目选择当地水平坐标系XOY(也称东北天坐标系)作为导航坐标系,并取其原点为无人机器人起始点,X轴为正东方向,Y轴为正北方向,Z轴向天,坐标轴的单位均为米。已知地球赤道圈长为40075.36千米和地球子午线长为39940.67千米,设起始点在WGS-84坐标系中的值为(λ0,ϕ0),则WGS-84坐标系到XOY坐标系的转换公式为:
在实验中为了保持实验稳定性,把自主行进机器人速度控制在0.1m/s,通过在坐标系的建立运动函数,数据处理周期间隔是0.01秒,通过采集数据,不断记录自主行进机器人行进的轨迹。
首先将基地系统位置经坐标系转化为坐标起始位置。同时初始化给定目标(运动或静止)起始位置,自主行进机器人处于待命令阶段,打开目标信号源发送目标信号;同时,将两机器人放出,在我们定义的系统坐标系里面,UV1在(0,35)位置,航向135,速度0.5m/s,UV2起始(30,0)航向315,速度0.5m/s,打开信号源静止目标在位置(25,25)发出信号。
当机器人搜寻到目标信号后,通过无线数据链传传输到地面控制系统。根据采集得到数据,我们利用Matlab 来描绘搜寻轨迹,得到机器人搜寻轨迹图如图5所示。
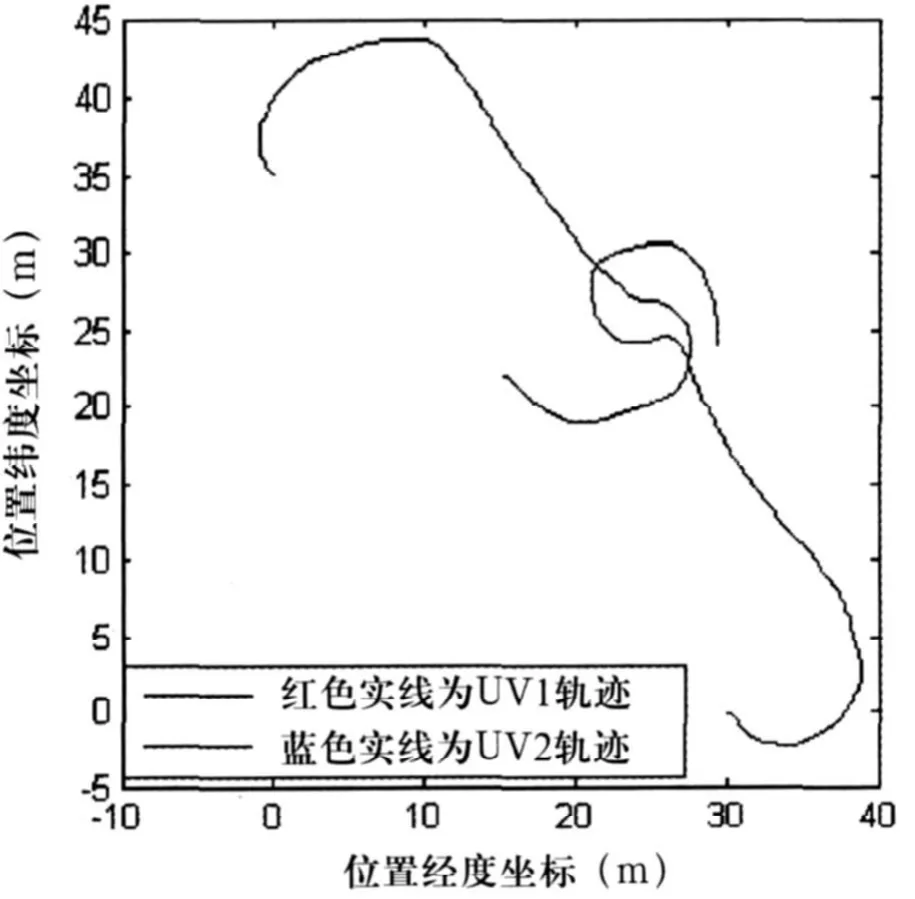
图5 机器人搜寻轨迹图
在地面模拟试验中,当机器人接收到目标信号后,通过与友机进行相互通讯,对目标位置进行定位,同时依据产生最小误差,机器人开始逐渐改变自己航向,不断逼近目标。这一过程都完成的比较好,从图5可以看出,在不同位置,一旦接收到目标信号,机器人便开始更正航向,按照我们设定的搜寻算法对目标的定位与逼近,同时不断的对目标进行了定位。实验结果表明该控制系统的可适用性以及实验平台和控制算法的有效性。
4 结论
随着无人机研究的日趋深入,多无人机协调控制是目前研究的一个热点问题。本文提出基于提高定位精度的导航算法来实现无人机对有源目标的搜寻,并基于两个自主行进机器人的实验平台,设计开发了一套模拟搜寻控制系统,并进行实验验证以及误差分析。实验结果表明该控制系统的可适用性以及实验平台和控制算法的有效性。
[1]修建娟,何友,王国宏,等.测向交叉定位系统中交汇角研究[J].宇航学报,2005,26(3):282-286.
[2]廖沫,陈宗基,周锐.基于MAS的多UAV协同任务分配设计与仿真[J].系统仿真学报,2008.529(增).
[3]王中华,覃征,韩毅.基于UKF的双平台无源融合跟踪方法[J].系统仿真学报,2007,10,19(19):4477-4486.
[4]K.Pine,M.E.Evans,K.Sammut and F.He , Radio Direction Finding for Maritime Search and Rescue[J],5th Asian Control Conference,2004,723-730.
[5]Randal W.Beard,Timothy W.McLain,Multiple UAV Cooperative Search under Collision Avoidance and Limited Range Communication Constraints [J],Proceedings of the 42nd IEEE Conference on Decision and Control.Maui,Hawaii USA,December,2003,25-30.
[6]Gregory J.Toussaint,Pedro De Lima, and Daniel J.Pack,Localizing RF Targets with Cooperative Unmanned Aerial Vehicles [J],Proceedings of the 2007 American Control Conference Marriott Marquis Hotel at Times Square New York City,USA, July 11-13,2007,5928-5933.
[7]胡来招.无源定位[M].北京:国防工业出版社,2004.
[8]王红星,曹建平.通信侦查与干扰技术[M].北京:国防工业出版社,2005.
猜你喜欢
中学生数理化·七年级数学人教版(2022年6期)2022-06-05
导航定位学报(2022年2期)2022-04-11
导航定位与授时(2020年5期)2020-09-23
铁道通信信号(2020年9期)2020-02-06
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
知识经济·中国直销(2018年3期)2018-04-12
数学大世界(2018年1期)2018-04-12
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07