负载对超精密平台性能影响的研究*
2010-08-07 02:29林海波杨国哲
制造技术与机床 2010年3期
林海波 杨国哲
(①台州职业技术学院机电工程学院,浙江台州318000;②沈阳工业大学机械工程学院,辽宁沈阳110023)
高精度和高分辨率的精密微位移系统,在近代尖端工业生产和科学研究领域占有极其重要的地位,它是直接影响精密、超精密切削加工水平、精密测量水平及超大规模集成电路生产水平的关键环节。同时,它的各项技术指标是各国高技术发展水平的重要标志[1]。微型机械、微型机器人领域是未来技术发展的一个非常重要的方向,在航空航天、国防、医疗以及广泛的民用工业领域都有着广阔的应用前景。微细电火花加工是利用工件和工具电极之间的脉冲性火花放电,产生瞬间高温使工件材料局部熔化和气化,从而达到蚀除加工的目的。
电火花加工放电脉冲的能量密度高,可以加工复杂形状的工件,加工中电极与工件材料不接触,一般没有宏观的切削力作用,因此在微小尺度工件的加工中有着不可替代的优越性。
平台包括加工单元子系统、运动子系统、运动测量反馈子系统、控制子系统、监视子系统、加工区状态监测子系统、减震子系统、工件台及供液子系统、环境保障子系统。
1 整体设计
整个系统如图1所示。基座全部由花岗岩组成,花岗岩基座下加隔振元件。由于花岗岩具有绝缘性好、无离散电容和电感产生的优点而适用于微细电火花加工。平台横梁采用一个整体石材加工所成,保证了横梁本身的高加工精度,尤其是横梁底面、右侧面、正面不仅保证了很高的形状精度,而且保证了很高的定位精度。这对于后期运动平台的装调起到了不可替代的作用。平台均以两组交叉滚子轨道支撑,XYZ精密平台中,X轴直线平台在水平面内垂直叠放于Y轴上,Z轴平台固定于龙门型立柱上,并设计了Z轴配重结构。X/Y向平台有150 mm的行程,Z向平台有100mm的行程。各单轴均采用以色列Nanomotion公司的低速电动机作为驱动元件,因为该电动机有20 nm的分辨率和理论上无限的行程。位置反馈元件为Rainshaw敞开式增量光栅,分辨率可达10 nm,精度为0.1 μm,可以直接实现大行程的精密运动。

为保证超精密工作台的机械精度、测量精度和系统稳定,整个平台工作在高等级的洁净间内,且采用主动式隔振台作为减低外界对平台运动影响的手段,进一步降低环境震动的影响,并且取得良好的效果。
2 负载对平台性能影响实验
电动机是依靠振动、摩擦来驱动的,包含很多非线性因素,很难确定一个清晰的理论模型,所以转速-驱动频率之间也没有确定的理论公式,尚无成熟的通用数学模型建立。数字PID控制器在优化电动机速度控制和平台定位控制之后,通过平台的单轴运动和多轴控制协调运动的系统测试,对平台的整体运动性能进行评价和深入研究。
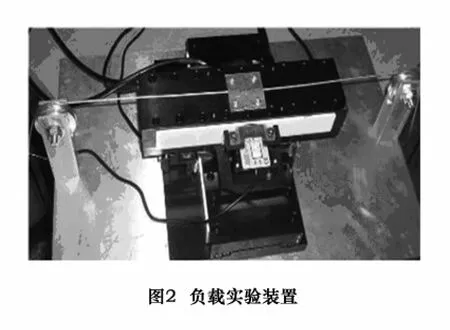
通过实验来检测平台的步进特性,实验装置见图2。为了测试平台的最小步进能力,通过测试程序令各轴电动机按设定值步进。从5μm开始,逐步减少步进量,直至找到能够平稳运行的最低速度。图3是放大的阶跃曲线,其最小步进阶跃为100 nm的实验,实验条件为空载情况下,台阶为100 nm。从图中可以看出,实现100 nm的阶跃还是比较平稳的。在最小步进实验中,系统各种控制器参数比较稳定,说明使用双向补偿结合PID的控制算法,改善了定位控制输出特性,对定位系统的控制鲁棒性较好。

选用的精密陶瓷电动机的负载能力有限,在微细电火花加工系统中,选用的平台基座和电火花加工头比较小,并且轻。图4、图5、图6是平台在空载和具有负载时的不同平台运动特性比较。
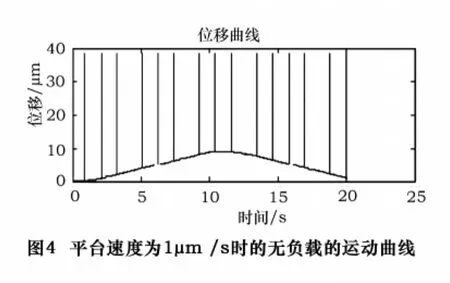
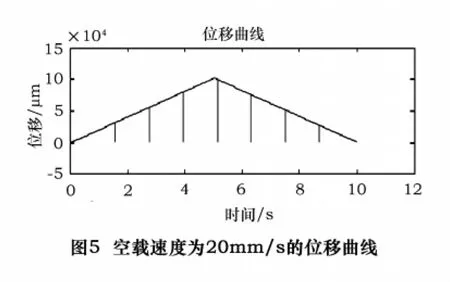
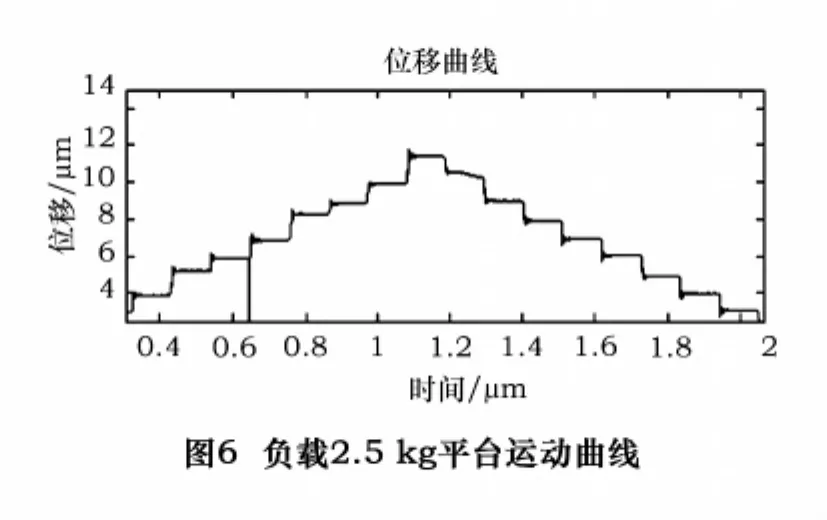
图6为轴加载2.5 kg时,速度为20 mm/s时的曲线。从图中可以看出,负载对平台的稳定有比较大的影响,在负载变化的时候最好能够调整PID参数,这样能够减小负载对平台平稳性的影响。
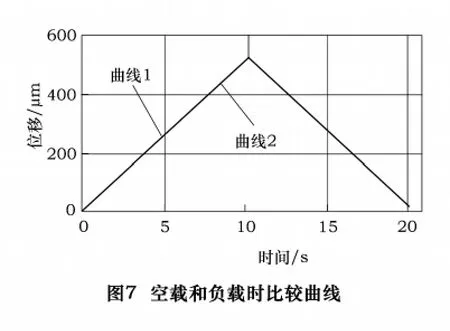
实验表明(曲线1为空载,曲线2为负载),平台具有极好的平稳运动特性,没有出现爬行现象,且具有超精密、超低速、高速和一定的负载能力。图7、图8可以看出平台在空载和负载时,在前进、后退、转向时都有一定的影响。在前行以及后退时两曲线呈平行状态。由于负载惯性及摩擦等因素的原因,前行时空载响应时间比负载时短。转向、负载时花费的时间要比空载时长。在后退时,负载状态下比空载状态下更早回到原始位置,因为在空载状态下前行时位移更大。

在小位移控制中,由于执行机构的非线性难于分析,死区宽度不被预知,所以必须采用合理的控制算法补偿死区。在实验中发现,静摩擦力是死区范围大小的主要因素。平台载荷变化和接触面磨损引起摩擦系数变化等均会影响电动机的死区范围。从电动机的驱动特性曲线中可知,在死区和饱和区中间范围,电动机输入与输出有良好的线性关系。为了进一步提高平台的定位精度,采用双向的静差补偿方法。通过判断电动机的运动方向,设定不同的静差补偿值,使电动机在启动和换向时,直接越过死区,保证电动机工作时处于线性区域。加入静差补偿后,提高了平台闭环系统的运动精度,充分体现了超声波电动机驱动的响应时间快、平稳、超低速和超高分辨率的优点。
3 结语
设计了一种可用于多种微加工方法、低速、多自由度及具有纳米精度的三维运动平台设计方案。其行程在三个方向上都在百毫米以上,三个方向上均采用精密陶瓷电动机,承担载荷大,结构简单。实验表明,平台在空载和负载情况下,在前进、后退、转向时对平台性能均有一定的影响。在负载变化的时候应调整PID参数,减小负载对平台平稳性的影响。通过实验显示,平台具有平稳运动特性。运动平台可以进行100 nm的步进运动,并且运动平稳,可满足极微细电火花加工中扫描运动中的步进要求。在水平面内一个方向上可实现步进,另一个方向可以运动。同时在平台以0.5 μm/s的速度运动时,平台没有出现爬行现象,运动平稳,可以满足加工过程中对超低速运动扫描的要求。此外在运动平台以20 mm/s的高速度运动时,平台也有很好的运动平稳性和速度均匀性。并且提出采用双向的静差补偿方法和提高定位精度的方法。实验证明,平台具有超精密、超低速、高速和一定的负载能力特性,具有精密的定位精度,满足微细电火花加工平台的基本要求,能够实现高精度的极微细电火花加工。
1 贾宝贤,赵万生,王振龙等.微细电火花机床及其关键技术研究[J].哈尔滨工业大学学报,2006(3)
2 Sun Lining,Sun Shaoyun,Qu Dongsheng,et al.Study on the Large Travel Range and High Precision Macro/Micro Dual drive Manipulator.High Technology Communication,2004(4)
3 王振龙,孟庆鑫,赵万生等.分层去除微细电火花铣削技术的实验研究.电加工与模具,2002(4)
4 杨国哲,韩博,林海波.超声波电机在三维微细电火花加工中的应用.机械设计与制造,2009(8)
5 Liu Xiangyang,Yu Dingwen,Cai xuejing,et al.Study on high Precision and Super-slow Speed Feeding Table for Micro-EDM Machining.Proceeding of the First International Conference on Precision Engineering and Micro/Nano Technology in Asia,Shenzhen 2005.
6 Li Y,Guo M,Zhou Z Y,et al.Micro Electro Discharge Machine with an Inchworm Type of Micro Feed Mechanism[J].Journal of the International Societies for Precision Engineeringand Nanotechnology,2002(26)
7 Naotake M,Hiromichi M,Nagao S.Development of an Electrical Discharge Drilling Device by Using a New Method for Direct Drive of Electrode[J].Journal of the Japan Society of Precision Engineering,1992,58(12)
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
防爆电机(2021年4期)2021-07-28
上海大中型电机(2021年2期)2021-07-21
铁道通信信号(2020年3期)2020-09-21
湖北农机化(2020年4期)2020-07-24
铁道通信信号(2018年8期)2018-11-10
制造技术与机床(2018年9期)2018-09-19
制造技术与机床(2017年10期)2017-11-28
制造技术与机床(2017年4期)2017-06-22
智能建筑电气技术(2015年5期)2015-12-10