
多机协同空战火力控制研究
2010-08-05 08:53付昭旺寇英信黄文卿兰俊龙
电光与控制 2010年9期
付昭旺, 寇英信, 黄文卿, 兰俊龙
(空军工程大学工程学院,西安 710038)
0 引言
现代空战作战空间广阔,情况瞬息万变,对抗激烈,电子环境复杂,有利作战时机稍纵即逝。只有先敌发现并连续掌握信息,果断、快速、准确实施机动,适时、正确地使用机载火力对敌进行瞄准射击才是取得空战胜利的关键。大量的空战实例和飞行员训练经验都表明,对目标的“先视先射”能力对空战结果具有重大的影响。空战中经常是谁先发现谁先射击,谁获胜的概率将会大大增加。而要达到“先视先射”要求的关键在于多机之间的协同攻击。
现代空战通常是由预警控制机、歼击机、电子战飞机、空中加油机等多机种进行的群体作战以及与地面防空部队协同作战。空战体系子系统之间“无形”的粘合是以通信为介质的,再加以有效的组织和体制才能实现体系效能的倍增和战术上的灵活多变。而灵活有效的组织和体制则需要靠“协同”来实现。
本文不全面研究多机协同空战问题,而是从多机协同空战火力控制的角度出发来研究多机之间的协同作战方式和相应的火力控制原理。采用分析和综合的思维来研究多机协同空战的火控过程以及实现方式。
1 多机协同空战的基本概念
多机协同空战指两架或两架以上战斗机相互配合、相互协作,执行战斗任务的空战方式,下面针对本文研究的多机协同空战给出一个基本定义。
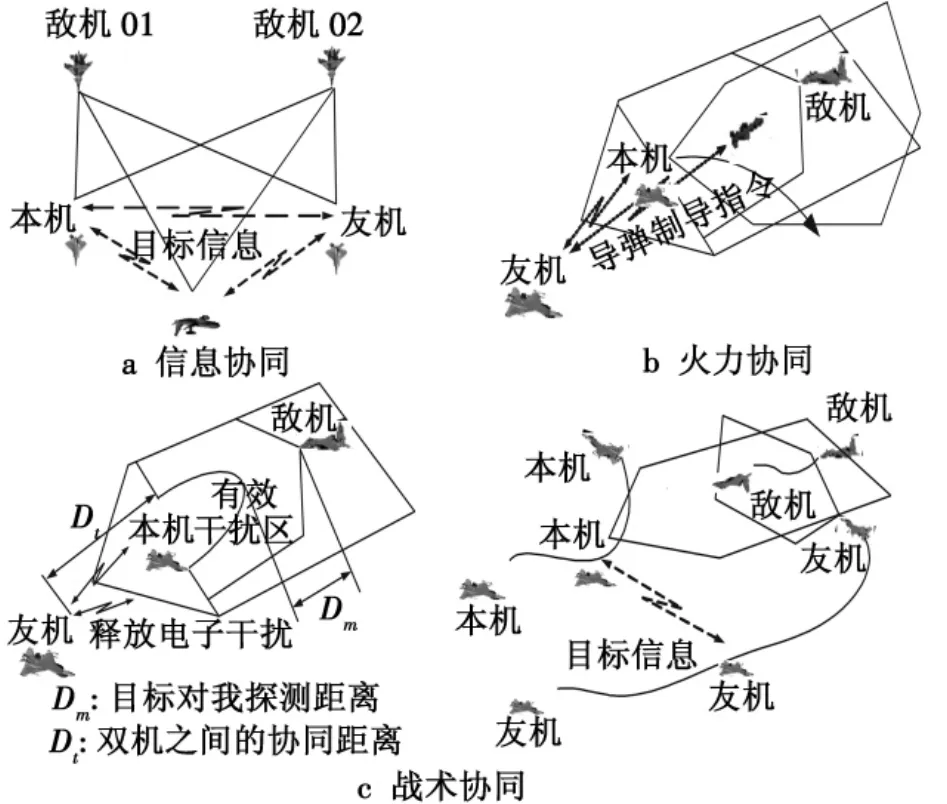
图1 多机协同空战的协同方式Fig.1 Cooperative approach of multi-fighter cooperated air combat
定义1 多机协同空战是指由多种战斗机组成的编队体系在探测、指挥控制、信息处理传输与武器打击之间进行的深层次互相配合的联合作战方式,目的是为了实施精准、快速、有效的攻击。它通盘考虑了整个作战的过程,是战术、技术和装备体系有机结合下实施的作战行动。
多机协同作战主要是通过多机之间的信息、战术、火力的相互支援和协调,提高我方载机的探测、跟踪和攻击能力。所以按照协同内容和协同的方式,可以将协同空战分为信息协同、火力协同和战术协同几种协同方式。图1以双机协同攻击为例分别绘出了3种协同方式的示意图。
在协同空战中,信息协同是前提,战术协同是手段,火力协同是目的。信息协同是指信息共享和信息融合,战术协同是研究各种新型的作战战术和协同攻击方式,火力协同以信息协同为基础和前提,主要包括协同武器发射与制导。
2 多机协同空战火控过程分析
为了分析多机协同空战的火控过程,本文以双机协同为例画出了协同空战火控过程框图,见图2。
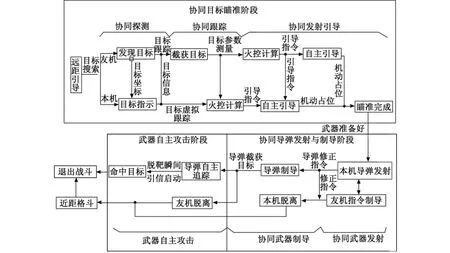
图2 双机协同空战火控过程流程图Fig.2 Fire control process of double-fighter cooperated air combat
经远距引导到达指定空域后,双机首先进行协同探测,当友机(或本机)发现目标后报告目标方位,本机可以关闭无线电雷达以保持无线电静默进行隐身。友机对目标进行跟踪测量,并将获得的目标信息传送给本机,本机可以将友机传递过来的目标信息进行火控计算,而友机也可以将所得的目标信息进行火控解算,本机和友机都可以根据自身计算得到的载机引导指令对目标进行瞄准,一旦本机(或友机)实现目标瞄准,载机即可发射导弹攻击目标,导弹发射后本机(或友机)脱离,武器制导过程可以由友机(或本机)完成,导弹制导完成后制导载机脱离,两架载机即协同完成了一次空战。
一次完整的空战的火控过程包括目标探测、目标跟踪、目标瞄准,武器发射、武器制导以及载机脱离。多机协同下的超视距空战也包括这些火控过程,但是协同空战的火控过程与传统上单机空战的火控过程又有不同:单机空战的火控过程是线性递进式模式的,对于载机来说,只有经历了前一步火控状态,才能进行后一步的火控状态;双机协同空战的火控过程是相互交织连接的,攻击的载机并不需要经历每一步火控状态,即空战过程完整的火控过程可以由多架飞机协同完成。比如,通过将友机跟踪测量获得的目标信息通过战术信息共享系统分发给指定攻击机。攻击机可以不需要探测和跟踪目标就能通过指挥机传递的目标信息进行火控解算,等同于自身对目标进行跟踪,这种协同过程称为“协同虚拟跟踪”。
3 协同空战阶段定义与任务分析
为了便于阐述,本文在此先对协同空战中载机的协同阶段进行定义。
定义2 协同目标瞄准是一种广义上的目标瞄准,是指两架或两架以上不同或相同类型飞机之间为实施对目标快速精确的瞄准、射击而展开的所有联合行动。协同目标瞄准包含协同目标探测、协同目标跟踪、协同目标分配和协同瞄准引导等多个协同过程。
定义3 协同武器发射与制导是指两架或两架以上作战飞机之间通过战场信息网络进行相互合作,完成武器发射与制导,对超远距和中远距空中目标和地面目标等进行打击的新型空战方式。协同武器发射与制导是对传统意义上武器发射与制导的一种扩展。协同武器发射与制导包括武器协同发射决策,武器协同制导决策,制导交接班等多个过程。
4 多机协同目标瞄准
为了通过多机协同实现对目标的“先视先射”,首先需要研究多机协同下的目标瞄准。从前面对协同目标瞄准的定义和分析可以看出,协同目标瞄准是从协同目标探测开始,经过目标截获、目标跟踪、机动占位、目标瞄准直至能够发射武器对敌进行攻击这一系列的完整的过程。协同目标瞄准按协同方式可以分为两种基本形式。
1)多机协同跟踪同一目标,指派某架载机实施瞄准攻击。这种方式的特点是,对目标进行瞄准的载机同时也在对目标进行跟踪测量,多架飞机之间相互进行目标信息交换,同时将友机传递过来的目标与本机测量的信息进行信息融合。
2)友机跟踪-本机瞄准,或者说本机跟踪-友机瞄准。这种协同目标瞄准特点是对目标进行瞄准的载机不对目标进行跟踪测量。通过与友机进行信息通讯来获取目标信息,保持自身的无线电静默达到隐身的目的。本文定义这种协同瞄准方式为协同静默瞄准。根据机间传递信息不同又将协同静默瞄准分为两种方式:①友机给本机传递目标运动参数;②友机给本机传递火控解,其示意图如图3和图4所示。

图3 传递目标参数的协同瞄准Fig.3 Cooperative target aiming based on transmitted target parameters

图4 传递目标火控解的协同瞄准Fig.4 Cooperative target aiming based on transmitted fire control solution
4.1 传递目标运动参数的协同瞄准
传递目标运动参数是指友机跟踪目标测量目标信息,然后通过数据链将目标信息参数传递给本机,本机将收到的目标信息通过坐标转换到自身飞机坐标系下,并进行滤波、误差修正和延时补偿等处理再进行火控解算,然后根据火控计算来完成目标瞄准,一旦瞄准完成,即可发射导弹攻击目标。后续的导弹制导可以由本机完成,也可以由友机完成。协同瞄准流程图如图5所示。

图5 传递目标信息参数的协同瞄准方式Fig.5 Cooperative target aiming method based on transmitted target information
传递目标运动参数的协同瞄准方式能够实现的关键在于本机接收到目标信息的准确性和可用性。准确性取决于两个方面:一是友机对目标参数测量的准确性;二是本机和友机自身定位的准确性。可用性取决于信息传递的数量和传递的频率,如果信息流量太小、参数太少,本机就无法进行火控解算,瞄准就无法完成。如果信息传递的频率太低,信息利用就比较困难,传递过来的目标信息参数就无法用于火控解算,即无法通过友机协同来实现对目标的瞄准。
4.2 传递目标火控解的协同瞄准
传递目标火控解(或引导指令)是指友机跟踪目标进行目标信息测量,再根据本机和目标的空间位置和运动状态,在友机上进行火控解算,实时地得到本机对目标的火控解,并将其传递给本机。本机通过计算瞄准参数对目标实施瞄准,达到武器发射条件后,本机即可发射武器。后续的武器制导同样可由友机或者自身完成。协同瞄准流程图如图6所示。

图6 传递瞄准引导指令的协同瞄准方式Fig.6 Cooperative target aiming method based on transmitted guidance instruction
这种传递目标火控解的协同瞄准方式的实现,友机需要连续地获得本机和目标两者之间的空间定位和运动状态,因为友机在“代替”本机进行火控计算的时候,不仅需要目标的信息参数还需要本机的信息参数。对比第一种方式,实现起来较困难或者代价较大。但是这种情况,对本机的要求比较低,因为所有的参数测量和火控计算都由友机完成,本机可以不配备火控设备,不需要安装火控系统。本机仅仅作为一种空中武器发射平台,可以是带有简易火控系统的歼击机或者是没有安装火控系统的无人机或巡航导弹。所以这种协同方式具有巨大的作战效能和发展潜力。
5 多机协同导弹制导
随着现代空战的发展,各种先进的空空导弹不断引入,但限于导弹的构造,导弹导引头的作用距离有限,在超视距空战中,导弹发射后都需要载机对导弹进行无线电指令修正中制导,以引导导弹导引头在主动段截获目标。但一般导弹的中制导只能由发射载机实施,这样给制导飞机带来较大不利,当制导飞机受敌威胁或者受敌干扰使自身雷达不能稳定跟踪目标,因而不能给已经发射出去的导弹发送修正指令,导弹极易脱靶。而通过友机的协同制导可以有效地解决这一问题。友机协同导弹制导示意图如图7所示。
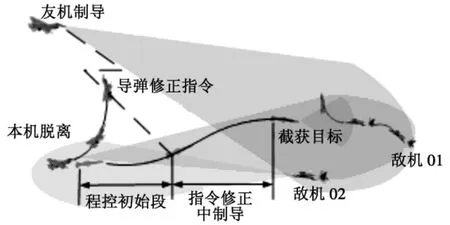
图7 友机协同导弹制导示意图Fig.7 Sketch map of cooperated missile guidance
在发射武器前,必须建立一个统一的制导坐标系,作为对武器的制导和制导平台解算无线电修正指令的基准坐标系。一般发射平台在发射武器前,其火控系统会自动建立一个“发射点基准坐标系”,作为武器惯导系统的基准。为减少坐标转换和提高制导精度,采用此“发射点基准坐标系”作为该型武器的制导坐标系,并通过数据链发送给其他参与的制导平台。以机载武器为例,“发射点基准坐标系”由机载火控系统在发射武器的前某一时刻建立,并通过与武器的动基座传递对准传给武器系统的火控计算机。可取建立时刻的发射载机所在的当地地理坐标系(本文采用“北东地”地理坐标系)为制导坐标系,与地球固连,如图8所示。对于中远程空空导弹,其发射距离较远,因此必须考虑“发射点基准坐标系”随地球的旋转带来的影响:

式中:wie为地球相对惯性空间的转动角速度;RZ为地球平均半径;λ为建立惯性系时刻的载机地理纬度。
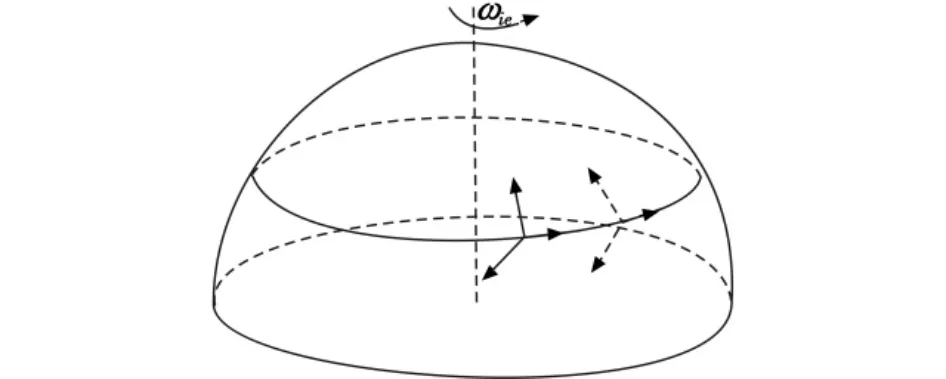
图8 协同制导基准坐标系Fig.8 Datum coordinate system of cooperated guidance
在导弹制导交接过程中,发射导弹的载机(统称为交班载机)需要向参与接替制导的载机(统称为接班载机)提供目标指示信息使制导载机完成对目标的截获并建立稳定跟踪。由于交班载机只能提供目标的跟踪信息,而接班载机需要的是目标指示信息,所以需要对目标指示信息进行计算。目标指示信息的解算流程如图9所示。
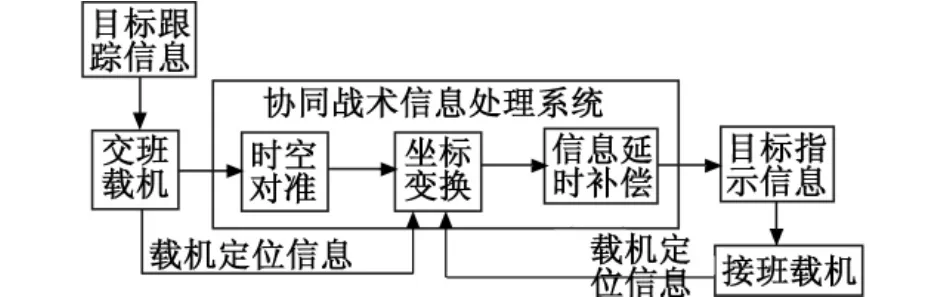
图9 目标指示信息解算流程图Fig.9 Flow chart for calculating target direction information
由计算流程图可以看出,目标指示信息解算包括交接载机之间的时空对准、信息转换和信息延时补偿3个部分。进行制导交接的载机在进行目标指示信息传递时必须对两架载机进行时空对准,同时应该对交班载机传递来的目标指示信息延时补偿,这样可以提高指示信息的精度。
6 结束语
协同空战是未来对空空战的必然趋势和现代空战的主要特点。在瞬息万变的激烈对抗下,多机协同不仅可以缩短射击反应时间,加快攻击速度,而且真正做到了“先视先射”,大大提高打击效率和作战效能。随着数据链技术的成熟应用,多机之间将可以通过数据链共享信息,这也为战斗机协同作战提供了必备的物质基础。本文从多机协同空战火控过程出发,初步探讨了多机协同空战的火控原理,提出了自己的一些见解,对协同空战的实施方案进行了阐述,相关技术基础将在后续的文章中进行论述。
[1]肖冰松,方洋旺,胡诗国,等.多机空战协同制导决策方法[J].系统工程与电子技术,2009,31(3):610-612.
[2]刘忠,张维明,胡剑文,等.以网络为中心的指挥控制组织探索性分析[J].火力与指挥控制,2009,34(5):31-35.
[3]于雷,周焘,任波.静态初始条件下的战斗机引导决策[J].空军工程大学学报,2007,8(5):1-4.
[4]乔榕.网络瞄准技术:地面移动目标的克星[J].现代军事,2004,5(7):47-49.
[5]姜玉宪,刘慧,申洋.远程空空导弹作战体系[J].北京航空航天大学学报,2005,31(1):21-24.
[6]何建华,高晓光,杨莉.基于网络中心战的空战理论分析[J].飞行力学,2004,22(4):81-84.
[7]MOFFAT J.Quantifying the benefit of collaboration across an information network[J].Journal of Defence Science,2003,8(3):123-129.
[8]姚宗信,李明,陈宗基.多机协同作战任务决策方法多智能体结构框架[J].电光与控制,2008,15(5):1-4.
[9]刘金星,佟明安.协同空战指挥控制系统智能体模型研究[J].火力与指挥控制,2003,28(2):24-26.
[10]夏英明.论航空火力指挥控制系统[J].电光与控制,2007,14(6):1-7.
[11]蓝伟华,喻蓉.多机编队协同空战的概念及关键技术[J].电光与控制,2005,12(6):1-4.
[12]蓝伟华,赵春玲.空对空多机协同攻击多个目标战术决策研究[J].电光与控制,1999,6(1):1-5.
[13]龙涛.多UCAV协同任务控制中分布式任务分配与任务协调技术研究[D].长沙:国防科学技术大学,2006.
[14]杨万海.多传感器数据融合及其应用[M].西安:西安电子科技大学出版社,2004.
猜你喜欢
航天电子对抗(2022年4期)2022-10-24
南京航空航天大学学报(2022年2期)2022-04-27
小哥白尼(军事科学)(2022年1期)2022-04-26
西安航空学院学报(2021年1期)2021-07-24
科学技术创新(2020年28期)2020-09-23
电脑爱好者(2020年6期)2020-05-26
军营文化天地(2017年6期)2017-06-28
火控雷达技术(2016年2期)2016-02-06
百科探秘·航空航天(2015年10期)2015-11-07
军事文摘(2015年10期)2015-01-10
