
双站步进频率雷达运动目标ISAR成像
2010-08-05 08:53汤子跃
电光与控制 2010年9期
芮 力, 汤子跃
(1.海军工程大学,武汉 430033;2.空军雷达学院空天基预警监视装备系,武汉 430019)
0 引言
与常规单站ISAR相比,双站ISAR有许多常规单站ISAR所无法比拟的优势:增强系统的工作性能和自我生存能力,提高目标的成像概率,增大作用距离(接收机前置),甚至提高对隐身目标的探测和成像能力[1]。文献[2]对于双基地雷达成像进行了系统研究,文献[3]首先提出了利用水面反射实现双站ISAR的设想,文献[4]对双站ISAR成像基本理论进行了分析,文献[5]研究了利用电磁计算和暗室测量数据对运动目标双基地ISAR成像系统的建模和仿真方法。
步进频率信号是一种工程上实用、方便灵活的高距离分辨率信号形式。它可以在获得距离高分辨率的同时具有较窄的瞬时接收带宽,降低对数字信号处理带宽的要求。但由于步进频率信号数据率较低,对目标的径向速度较为敏感。在进行脉冲相参合成处理时必须对目标运动加以补偿,否则将会导致距离分辨率下降、测距精度降低、信噪比损失和距离像畸变等问题[6-7]。因此在步进频率雷达中必须对运动目标进行速度补偿。典型速度估计方法有距离微分法、频域互相关法、时域互相关法等。
对于双站雷达系统,双站雷达的等效雷达视线方向为双站角平分线方向[4],本文在分析双站步进频率ISAR回波信号模型的基础上,先用距离微分法估计双站ISAR的等效径向速度,通过粗补偿后,再利用积累相关法对包络进行精补偿。
1 运动目标回波信号模型分析
假设目标以匀速vTg、在高度H沿与收发站连线平行的方向运动,建立如图1所示的运动目标双站ISAR空间结构模型:XOY为固定坐标系,发射站位于坐标原点O,接收站位于(L,0);uov为固定在目标上并随目标一起运动的坐标系,o为目标的旋转中心,目标上任一点p到旋转中心o的距离为r,其极坐标表示为p(r,φ);xoy坐标系的y轴为双基地角的角平分线方向,即双基地雷达的等效雷达视线方向。对于收发站固定的双基地雷达系统,在观测时间内,目标的双基地角可近似认为不变[8]。

图1 运动目标双站ISAR空间结构模型Fig.1 Bistatic ISAR geometry model for moving target
初始时刻t0,雷达收发站到目标旋转中心的距离分别为RR(t0),RT(t0),距离和为RTR(t0),双基地角为β,坐标轴x与坐标轴u的夹角为θ;P到收发站的距离分别为RRP(t0),RTP(t0),距离和为RTRp(t0)。经过观测时间t,t1时刻(t=t1-t0),雷达收发站到目标旋转中心的距离分别为RR(t1),RT(t1),距离和为RTR(t1);P到收发站的距离分别为RRP(t1),RTP(t1),距离和为RTRp(t1)。通常情况下,在成像时间内,RR(t0),RT(t0),RR(t1),RT(t1)>>r且 vt<<RR(t0),则:
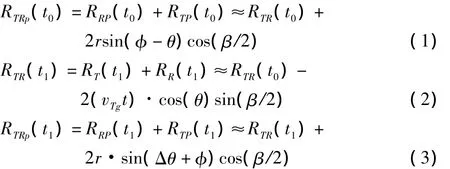
则在t0和t1时刻,散射点P的收发距离和的变化量为
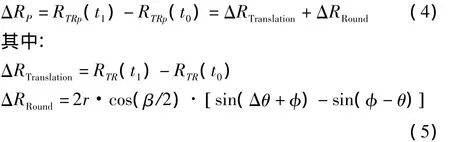
由式(4)可以看出,ΔRP由两部分组成:一个是由目标平动引起的ΔRTranslation,会造成同一散射点相邻两回波的延时变化,从而无法对方位向进行分辨;一个是由于目标运动导致的目标相对于等效雷达视线的转动引起的ΔRRound,会造成同一散射点相邻两回波的相位变化,这也是ISAR进行方位成像的基础。
设步进频率雷达每次发射M组步进频率脉冲信号,每组信号脉冲个数为N,脉间频率步进长为Δf,脉冲重复周期为Tr,脉冲宽度为T,载频为f0。则发射的第m个脉冲信号可表示为
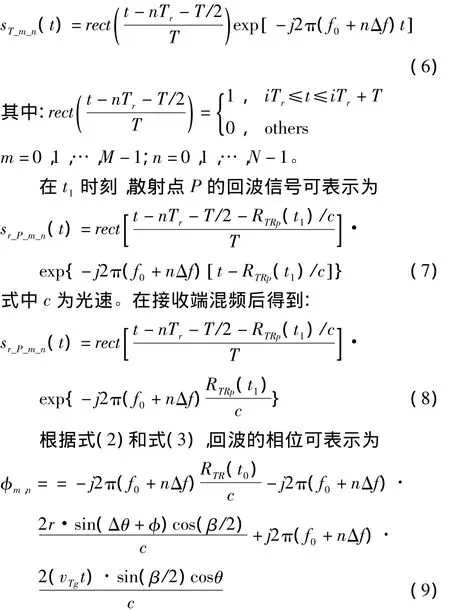
为得到最大的回波信号幅度,采样时刻取t=mNTr+nTr+T/2+RTR(t0)/c,代入式(9)并展开得:

朋友们的善意我都心领了。而实际上,我也只能心领。但老婆却不这么认为。她认为我是在端架子,故意不给她闺中密友面子,让她难堪。甚至还为了这点儿芝麻绿豆大点儿的小事儿向我发脾气。大概十月末,我们终于坐到了一起,当包东坡问起我身体的情况时,她竟然语带挖苦地说我是小病大养。气得我差一点儿就当场喷血。就为了她这句极不负责任的话,我也有理由拿出勇气,捍卫我的自尊。更何况我当时的症状才刚刚有所好转,滴流才停,还一直口服着头孢。
由图2可以看出,随着目标速度的增大,散射点走动变大且距离像展宽严重,导致信噪比和距离分辨率下降。因而要得到稳定的一维距离像,必须对目标的速度进行补偿以实现正确的成像与精确测距。

图2 目标速度变化时的距离像Fig.2 Range profiles with different velocities
2 目标运动补偿及ISAR成像
距离微分法[9]是利用速度的定义,将不同帧间的距离差除以帧间时差,得到目标速度的估计值,然后用此估计值对回波信号进行粗补偿。

式中:ΔR为距离像帧间对应的距离差值;np为距离像帧间隔个数;NTr为一帧经历的总时间。目标速度的估计精度和所选取的时差长度有直接关系:当选取的时差较长时,能得到较为准确的速度估计。
假设目标在运动过程中姿态没有发生变化,也就是前后帧之间得到的目标散射中心没有本质上的不同。对第1帧和第np帧两帧数据进行距离像抽取[10],分别得到第1帧的一维距离像数据矩阵S1,第np帧的一维距离像数据矩阵S2。利用两帧数据互相关提取出两帧间移位的具体点数,然后利用步进频率雷达参数计算出相应的距离差ΔR,最后利用距离微分法对目标速度进行估计。
具体成像算法如下。
1)对回波数据进行IFFT处理以得到目标的一维距离像。对于运动目标来说,此时的一维距离像已经发生了时移和展宽。
3)对第1帧和第np帧两帧数据的一维距离像用距离微分法估计双站系统的等效径向速度,利用估计出的等效径向速度对一维距离像进行补偿并计算两帧数据的延迟。
4)重复步骤3)直至两帧数据没有延迟,表明粗补偿已完成。
5)补偿掉等效径向速度带来的影响后,利用相邻回波的积累,用积累相关法[9]进行精补偿,使稳定的回波得到加强,杂散回波得到抑制,提高补偿精度,保证成像质量。
6)对补偿后的回波进行合成处理得到目标的二维ISAR像。
3 仿真分析
仿真时采用的主要参数如下:M=128;N=256;Δf=0.5 MHz;Tr=10μs;T=2μs;f0=40 GHz。
收发站与目标的几何位置如图3所示,雷达发射站为坐标原点,接收站与发射站的基线距离为L=20 km;目标以速度v=200 m/s,高度H=20000 m,飞行方向与收发站连线平行;目标含有11个散射点,各散射点的坐标为:x=[9809809809901000100010001010102010001000],y=[2051020500204902050020510205002049020500205002052020480],散射点分布情况如图4所示。

图3 收发站与目标的几何位置Fig.3 Geometrical position of bistatic radar and target
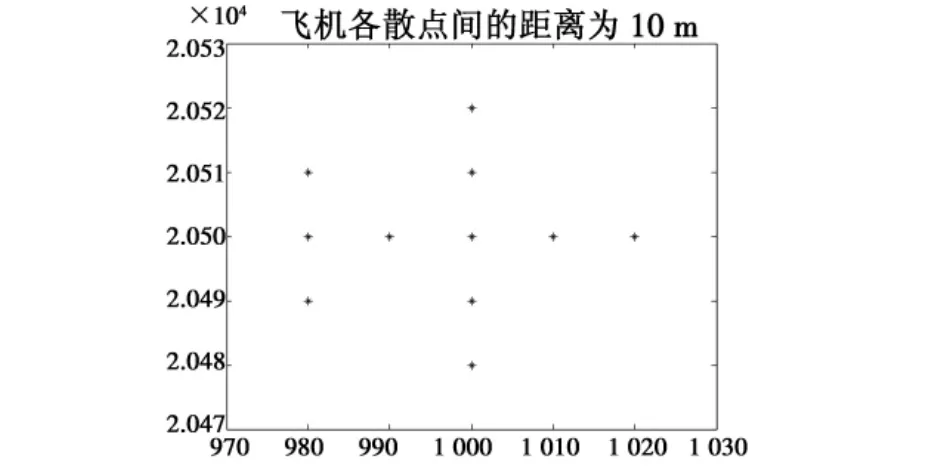
图4 目标散射点模型Fig.4 Target’s scatter model
利用距离微分法对目标等效径向速度进行估计,而后对目标回波进行补偿。对补偿后的回波数据进行IFFT处理,得到256组距离像。图5为未进行速度补偿前第1脉组和第128脉组的距离像,图6为进行速度补偿后第1脉组和第128脉组的距离像。
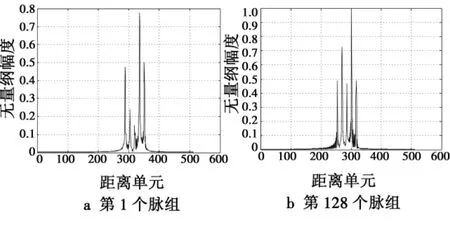
图5 未进行速度补偿的距离像Fig.5 Range profiles before velocity compensation

图6 进行速度补偿后的距离像Fig.6 Range profiles after velocity compensation
从图5、图6可以看出,粗补偿后的距离像已经取得了较好的效果,距离像的相关性增大,为精补偿打下了基础。图7为粗补偿后再利用积累相关法进行精补偿后所得到的目标ISAR二维像。

图7 运动目标的二维ISAR像Fig.7 2D ISAR image of moving target
4 结束语
在双基地步进频率雷达中,目标的运动会造成距离像的移位与发散,使得二维像模糊散焦。本文应用距离微分法对双站步进频率雷达等效径向速度进行估计,粗补偿后,利用积累相关法进行精补偿,从而确保了补偿精度,仿真结果验证了该方法的有效性,得到了较为理想的目标ISAR二维像。
[1]BLYLAKHMAN A B,RUNOVA I A.Forward scattering radiolocation bistatic RCS and target detection[C]//IEEE International Radar Conference,1999:203-208.
[2]汤子跃,张守融.双站合成孔径雷达系统原理[M].北京:科学出版社,2003.
[3]PALMER J,MARTORELLA M,LONGSTAFF I D.Airborne ISAR imaging using the emulated bistatic radar system[C]//Proceedings of EUSAR 2004 Conference,ULm Germany,2004:375-378.
[4]张亚标,朱振波,汤子跃,等.双站逆合成孔径雷达成像理论研究[J].电子与信息学报,2006,28(6):969-973.
[5]朱玉鹏,张月辉,王宏强,等.运动目标双基地ISAR成像建模与仿真[J].系统仿真学报,2009,21(9):2696-2699.
[6]涂建华,汤广富,肖怀铁.一种基于单帧数据的步进频信号运动补偿方法[J].电光与控制,2009,16(7):68-71.
[7]吴波,潘明海.步进频率雷达飞机目标距离像补偿算法[J].雷达科学与技术,2009,7(4):267-271.
[8]吴勇.双站逆合成孔径雷达二维成像算法研究[D].长沙:国防科技大学,2005.
[9]韩文勇.脉冲频率步进雷达运动目标高分辨率一维成像[D].合肥:中国科学技术大学,2000.
[10]陈建军,王飞行,陈远征,等.频率步进雷达高分辨距离像解模糊算法[J].国防科技大学学报,2009,31(4):93-97.
猜你喜欢
山东冶金(2019年5期)2019-11-16
电子制作(2019年15期)2019-08-27
小学生学习指导(低年级)(2018年12期)2018-12-29
航空兵器(2017年6期)2018-01-24
农业与技术(2016年24期)2017-04-20
人生十六七(2016年14期)2016-12-01
火控雷达技术(2016年3期)2016-02-06
百科探秘·航空航天(2015年4期)2015-11-07
现代农业(2015年1期)2015-02-28
西安电子科技大学学报(2014年5期)2014-07-25
