串级控制系统在电机控制中的仿真研究
2010-07-25 08:13刘迪刘孝磊张海鹰王晶
船电技术 2010年6期
刘迪 刘孝磊 张海鹰 王晶
(海军航空工程学院, 山东 264001)
近二十年,电机控制技术获得了惊人的成就,已在工业生产和科学发展中起着关键作用。而且,电机已成为大量设备不可分割的重要组成部分。电机控制自动化的程度已成为衡量工业企业现代化的一个重要标志。
设计一个自动控制系统,首先要了解控制系统的组成和特点。在早期的工业生产中,对电机的控制主要采用单回路调节系统,单回路调节系统一般是指在一个调节对象上用一个调节器来保持一个参数恒定,而调节器只接受一个测量信号,其输出也只控制一个执行机构。可以说,它是一种最基本的,使用最广泛的控制系统,它只解决了生产上的恒值调节的问题。随着现代工业的发展,工艺的革新,对调节质量的高要求,在某些情况下,单回路控制系统无能为力,就需要在单回路的基础上采取其他措施,组成复杂系统,也称多回路系统。此系统是由多个测量值、多个调节器,或是由多个测量值、一个调节器、一个补偿器或一个解耦器等组成的多回路控制系统。
在众多复杂的控制系统中,串级控制系统在电机控制中的应用更为普遍,串级控制系统是一个双回路系统,一个控制器的输出控制另一个控制器的设定值,这种结构称为串级控制系统。串级控制系统实质上是把两个调节器串接起来,通过它们的协调工作,使一个被调量准确保持为设定值。通常,串级系统副环的对象惯性小,工作频率高,而主环惯性大,工作频率低[1]。
1 串级控制系统的优越性
1.1 串级控制系统的响应速度
采用串级调节的效果可用图1来说明,主调节器的任务主要是克服落在副环以外的扰动,并准确保持被调量为给定值。由于副回路的存在,串级系统与单回路系统相比,除了克服落在副环内的扰动外,还提高了系统的工作频率,加快了过渡过程。副回路调节主要是用来克服落在闭环内的扰动。这些扰动能在中间变量反应出来,很快就被副调节器抵消了。与单回路系统相比,干扰对被调量的影响可以减小许多倍。

图1 串级控制系统结构图
图1中的调节对象为两个一阶的惯性环节,调节器都是比例调节规律,它们的传递函数为:

把闭环的副回路看作等效对象Gc2(s),则它的传递函数为
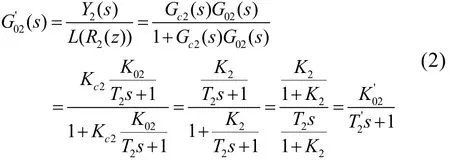
式中K2=Kc2K02,有

可知,由于采用串级调节,时间常数T2减小1+K2倍。而且副环的调节对象是一阶惯性环节,所以它的放大系数K2可以取得很大,副环时间常数可以减到很小的数值。另一方面,式(3)表明,等效对象的放大系数却有所减小。因此,串级调节系统中,主调节器的放大系数可比同等条件下的单回路系统调整的更大些,这对于提高控制系统的抗干扰能力也是有好处的[2]。
1.2 串级控制系统的过渡过程频率
串级系统中,当其主回路反馈断开时的开环传递函数为G(s)

闭环系统的特征方程为

将(4)代入(5)中整理得

将(1)式中各环节的传递函数代入(6)中并化简得
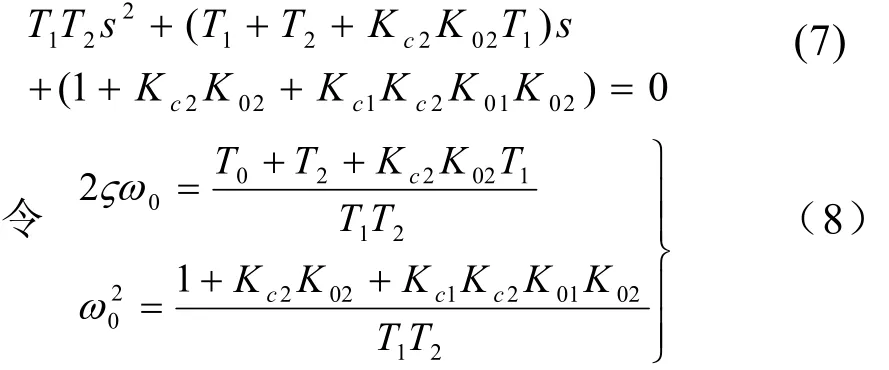
将上面特征方程式改写成下列标准形式

式中,ς—— 串级控制系统的衰减系数;
ω0—— 串级控制系统的自然频率。
由(9)式求解得

因为只有当 0 <ς< 1 时,系统才会出现振荡,而振荡频率即为串级控制系统的工作频率ω串级(即为根的虚部),即

作为比较,可用同法求出单回路系统在同样条件下的工作频率[3]。
串级调节系统由于副回路改善了对象的动态特性,使整个系统的过渡过程的频率有所提高。当对象特性一定时,副控制器的放大系数越大,则工作频率越高。
2 串级调节系统的整定原则
串级调节系统的整定比单回路系统要复杂一些,因为两个调节器串在一个系统中工作,互相之间或多或少有些影响。在运行中,主环和副环两者波动频率不同,副环频率较高,主环频率较低。这频率主要决定于调节对象的动态特性,也与主、副调节器的整定情况有关。在整定时应尽量加大副调节器的增益,提高副环的频率,目的是使主、副环的频率错开,最好相差三倍以上,以减少相互之间的影响,提高调节质量。
1) 在通常情况下,副环的对象时间常数较小,而副环以外的那部分对象特性的时间常数和滞后都较大。主副环的波动频率相差较大,可按以下方法整定。
整定时先切除主调节器,使主环处在开断的情况下,按通常方法(如衰减率φ=0.75~0.9)整定副环调节器参数。然后再投入副调节器的情况下,把副环作为弱阻尼的二阶环节等效对象,再加上副环外的部分对象,按通常方法整定主调节器参数。
考虑到在运行中,有时主调节器会由“自动”状态切到“手动”。这时主环断开,只留下副调节器独立工作。这种情况下副环应该有一定的稳定裕度,不能把副调节器放大系数整定的过分大,以至于使副环处于振荡状态。
2) 当由副环分割的两部分对象的时间常数和滞后大致相等,主副环的频率比较接近时,它们之间的相互影响就大了。在这种情况下,就需要在主副环间反复进行凑试,才能达到最佳整定。但是,这种反复的凑试是很费事的。一般串级调节系统对副环的质量指标没有严格要求,而主环的质量指标要求很高。这时,主环,副环的相互影响虽然存在,只要保证了主回路的质量指标,副环的调节质量允许降低一些[4]。
3 串级控制系统的设计
3.1 串级控制系统的举例说明
下面举个例子来进一步认识串级调节系统的构成原理。图2是一个液面单回路控制系统,电机对阀门开关程度的控制是该系统的重要参数,要求较严格。为保证水池内水位的恒定,图2中用调节器1来调节,阀门开度传感器能够测量到水位的实际高度,当注入到水池里的水发生扰动时,调节器1开始动作,来控制水池里水的流量,但是要经过一段时间的滞后才可以作用到注入到水池里的水,这样既不能及早发现扰动,又不能及时反映调节效果,发生动态偏差,影响系统的安全运行[5]。

图2 液面单回路控制系统
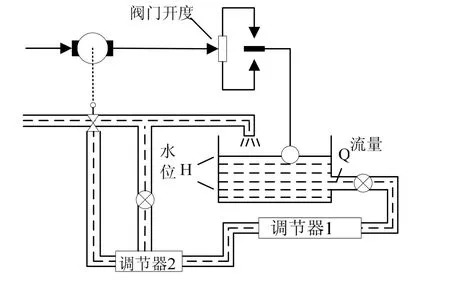
图3 液面串级控制系统
为解决此问题,如图3液面串级控制系统,再加入一个调节器 2,构成一个串级调节系统。一旦注入到水池里的水发生扰动,首先反映为调节器2调节水流量的变化,而调节器1的输出是用来改变调节器2的给定值,起着最后校正的作用,因而大大地减少了扰动对水流量的影响,提高了调节品质。通过对上面例子的分析,可归纳出一个串级控制系统方框图,如图4所示。
由图 4可知,副回路在控制过程中起“粗调”的作用,主回路用来完成“细调”的任务,以最终保证被调量满足系统的要求。调节器1与调节器2不互相作用。调节器 1有独立的设定值,它的输出作为调节器2的设定值,而调节器2的输出信号用来控制阀门的开度从而进一步去控制水的流量。在串级控制系统中,两个调节器的任务不同。调节器2的任务是以迅速抵消落在副环内的扰动,而中间变量并不要求无差,一般都采用PID调节器。调节器1的任务是准确保持被调量符合生产要求。因此调节器1必须具有积分作用,一 般都采用PI调节[6]。

图4 串级控制系统方框图
3.2 仿真说明
根据上面的叙述,我们可以把上面所说的实际例子抽象成为数学模型。事先给定系统中的传递函数G(s)=10/(s+3)(s+7),由于副回路在控制过程中起“粗调”的作用,主回路用来完成“细调”的任务,分析这个传递函数,可以认为它是由两个惯性环节串联构成的。可以认为主回路控制对象是G(s)=10/ (s+7),副回路控制对象是G(s)=10/(s+3)。根据调节器的选型原理,副回路中选择了 PI调节器,在主回路中采用 PID调节器。对主调节器进行整定,在对副调节器进行微调,直到控制效果比较令人满意。整个过程都是在SIMULINK环境中实现的[7]。其中,第一个调节器的传递函数是:G(s)=10/(s+7),PI调节器的整定参数为:P=4,I=2;主对象的传递函数为:G(s)=1/(s+3),PID 调节器的整定参数为:P=5,I=3,D=2。利用 SIMULINK 环境中的仿真软件搭建的串级控制系统模型图如图5所示。
在整个串级控制系统的输入端输入一个阶跃信号,在示波器中得到的仿真图如图6所示,可以明显的看到,使用串级控制系统得到的仿真曲线,过渡过程非常平稳,没有超调量,曲线的波动不大,稳定性好。

图5 串级控制系统SIMULINK模型图
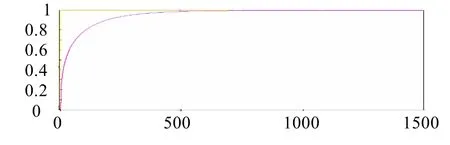
图6 串级控制系统SIMULINK仿真图
4 结束语
串级控制系统是一个双回路系统,实质上是把两个控制器串接起来,通过它们的协调工作,使一个被调量准确保持为设定值。通常,串级系统副回路的对象惯性小,工作频率高,而主回路惯性大,工作频率低。这种结构,使其具有自己的特点,在一个串级控制系统中,因为控制器的放大系数数值决定了这个系统偏差信号的敏感程度,因此也就在一定程度上反映了这个系统的抗干扰能力。可以证明,串级调节系统中,由于系统多了一个副回路,当干扰落于副环时,其扰动能力比同等条件下的单回路控制系统提高了。通过仿真可见,我们可以通过改变PI调节器、PID调节器的参数来达到减小超调或减少调节时间的目的,从中可以体现出串级控制系统的优越性。
[1] 施仁, 刘文江编著. 自动化仪表与过程控制. [s.1.]:电子工业出版社,2003.
[2] 张广溢,惠毅. 可控硅串级调速系统的工程设计. 电气传动,1985 (1):3036.
[3] 王励涛. 高压内反馈串级调速电机及其控制装置在水厂的应用. 中国给水排水, 1999,15(1):59-60.
[4] 秦晓平,王克成著. 感应电动机的双馈调速和串级调速. 北京:机械工业出版社,1990
[5] 王积伟, 陈一心, 吴振顺等. 现代控制理论与工程.(第一版) [s.1.]:高等教育出版社,2003.
[6] 涂植英,朱麟章编著. 过程控制系统. [s.1.]:机械工业出版社,1988.
[7] 黄忠霖. 控制系统 MATLAB计算及仿真. 北京:国防工业出版社,2001:399-416..
猜你喜欢
湖北农机化(2021年7期)2021-12-07
中文信息(2016年11期)2017-02-11
现代电子技术(2015年22期)2015-12-02
自动化仪表(2015年5期)2015-06-15
电源技术(2015年9期)2015-06-05
电源技术(2015年9期)2015-06-05
电子技术与软件工程(2015年6期)2015-04-20
汽车维修与保养(2015年6期)2015-04-17
电测与仪表(2015年20期)2015-04-09
电测与仪表(2015年3期)2015-04-09