
基于多源信息融合模型的高龄驾驶员安全性评估方法研究
2010-07-25 07:16:34徐莉赵群飞
微型电脑应用 2010年8期
徐莉,赵群飞
0 引言
随着社会经济和工业技术的快速发展,车辆在人民的生活中扮演着日益重要的作用,给我们的生活水平的提高和业余生活的丰富带来了便捷。拥有驾驶证和车辆的高龄人士越来越多。据统计,2008年在中国拥有60岁以上的高龄驾驶员25640万人,美国也有超过185万名71岁以上的老年驾驶员,因为高龄人士身体机能的衰退,他们在视力、复杂信息处理能力和反映速度方面明显减缓。同时,由于生理机能的衰退,老龄驾驶员在心理上也产生了恐惧,导致高龄驾驶的事故频频发生,损失惨重。由于高龄驾驶员面临的安全问题,近年来适合于高龄驾驶人员的辅助驾驶系统成为辅助驾驶的研究热点。2006~2009 年美国财政拟每年拨款170 万美元专门用于老年驾驶的安全研究, 并开展“老年驾驶员交通安全规划”[1]。高龄驾驶员在政策法律,健康,社会支持、车内设备等方面的研究也逐步成为辅助驾系统研究的热点[2]。文献[3]分析了中国机动车驾驶实情,并提出需要结合中国机动车辆市场,从实际出发设计出一种适合老年人的驾驶车辆系统。文献[4,5]分析了高龄驾驶员的反应能力。这一系列研究在一定程度提高了高龄驾驶人员驾驶行为的安全性。
针对老年人安全驾驶问题,本文提出了一种基于模糊信息融合的驾驶员行为安全评估方法,主要包含三个部分信息采集模块、信息融合模块、信息输出模块和信息反馈模块。通过信息采集、信息融合、策略调整等方法实现驾驶行为的全面分析,以全面提升驾驶行为的安全性和舒适性。
1 驾驶安全行为评估方法流程
1.1 系统架构
根据提升高龄人驾驶行为安全性和舒适性的需要,本文提出如图1所示的多源信息融合模型,有效解决多传感器数据的有效处理的问题。模型主要包括3个模块:

图1 多源信息融合模型舒适模块
1)信息采集模块:该模块中包括路况信息采集、驾驶员行为监控采集和驾驶舒适度监控两大功能单元。其中路况信息采集模块,包括障碍物采集、车辆移动信息采集,天气情况信息采集等;驾驶员行为监控采集单元,主要获取驾驶员的状态信息,全面反映老龄驾驶人员的状态变化情况;
2)信息融合模块:这部分主要研究如何将驾驶员行为信息、路况信息以及舒适度信息等进行融合。我们采用车辆碰撞历史日志作为训练样本,来对融合规则进行生成和构造。
3)信息输出模块:对于多源的信息进行融合后,给出综合的统一安全评价量化等级等级,并且通过预警等方式,为驾驶员提出合理的和操作的驾驶行为改进建议。
4)信息反馈模块:这部分主要实现驾驶员之间差异的自适应性,通过驾驶行为日志的挖掘和分析,实现系统的自动调节,提高对驾驶员行为的适应性,为驾驶员的行为提出正确的建议。
1.2 高龄驾驶者行为安全性模型
驾驶行为的安全模型将全面度量高龄驾驶人员的驾驶行为的安全性,经过对老年人驾驶行为的研究,我们认为老龄人随着驾驶时间和驾驶速度的增加都将导致驾驶行为的降低,据此提出驾驶行为的时间安全度量模型:

式中Degree表示驾驶安全度,V表示驾驶速度,t表示持续驾驶时间,strength表示驾驶员动作灵敏度。Road和Weather表示驾驶环境信息。由式(1)我们可以看出,驾驶行为安全度和驾驶时间和驾驶速度成反比,随着驾驶速度的增加和驾驶时间的增长,将导致身体机能的衰退,势必引起驾驶安全度的降低。另外,驾驶环境也对驾驶行为安全度具有重要影响,由式中我们可以看出是反比关系,即若驾驶环境信息量化值越大,环境信息越糟糕,驾驶行为安全度就越低。
1.3 模糊信息融合模型
数据融合主要研究在现代战场管理中对海量的战场多源信息的快速有效处理,即把来自许多传感器和信息源的数据和信息加以联合、相关和组合,以获得精确的位置和身份估计,从而获得对战场和威胁及其重要程度适时的完整评价。

图2 数据融合的White模型
基于以上给出的基本概念,以两入一出、英国学者提出的 Mamdani模糊推理算法为例,简要介绍模糊推理过程如下:
1)输入给定, 给定量化论域X、Y、Z,及其上的模糊集
F(X)、F(Y)、F(Z),模糊集合Ai=(a1i, ...,ani),Bi=(b1i, ...,bmi)和Ci=(c1i, ...,cti), 模 糊 规 则 “IFAiANDBiTHENCi”(i=1,...,p)。其中aji(j=1,...,n)、bji(j=1,...,m)、cji(j=1,...,t)分别为论域X、Y、Z中各元素属于模糊集合Ai、Bi、Ci的隶属度,P为模糊变量的个数。
2)模糊关系求取:基于给定的模糊集和模糊规则,求得总模糊关系为:

这里,(Ai×Bi)T1表示把这个n×m模糊矩阵按行“拉直”成nm元模糊行向量,再转置成nm元模糊列向量,Ai×Bi是模糊向量的笛卡儿积。
3)求取输出模糊量,在求取总模糊关系R的基础上,对某一模糊特征向量A*、B*,进一步可求输出的模糊量:

这里,(A*×B*)T2的含义是把A*×B*这个n×m模糊阵按行“拉直”成×元模糊行向量。
4)求取输出精确量,对模糊输出量C*通过重心法解模糊判决式,可求出输出的精确量,计算公式为:

其中,i代表论域C的量化论域值,s代表量化论域的范围。
2 模糊数据融合在辅助驾驶中的应用
结合前文分析,提出如图3所示的辅助驾驶模糊信息融合模型。其中道路状况检测结果数据库Road Situation Log、Drive Behavior Log为融合推理的数据源,Comfort log 与Incident Log相结合指导制定模糊推理规则,经过模糊融合计算,可得到驾驶环境安全性动态评估结果,并根据结果提出驾驶行为的调整策略。在
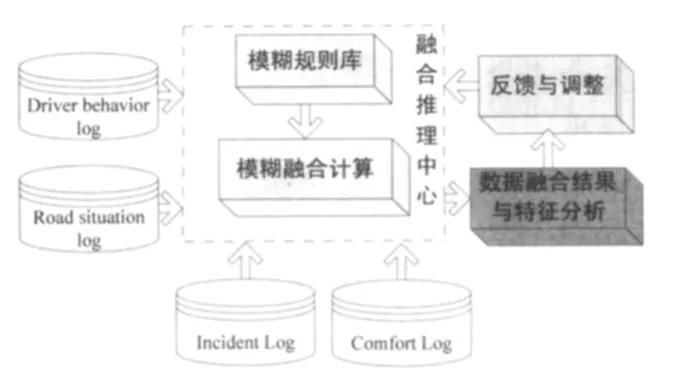
图3 辅助驾驶中的数据融合模型
3 模糊信息融合过程实现
3.1 输入、输出变量的确定
应用模糊信息融合推理进行评估的过程中,论域X、Y、Z分别对应路况分值RV、驾驶行为量化分值DV和由此所得到的驾驶环境安全性分值 CV,F(x)、F(Y)、F(Z)分别对应RV、DV及CV的模糊语言变量集合。路况多源信息融合模型的输入为路况量化分值 RV、驾驶行为量化值 DV。驾驶行为舒适度CD和相应环境下的碰撞次数CN,与人类的思考规律相结合制定模糊推理策略。模型输出为当前驾驶环境安全性分值CV。根据道路环境、车辆环境和天气等原因为路况信息进行量化处理,设置量化范围为[0,180],其数值随路况由坏到好的程度增长而增长。根据驾驶员年龄、驾驶经验、驾驶员驾驶过程中身体机能等对驾驶员行为信息进行量化处理,量化范围为[0,100],其数值随驾驶行为评价的由坏到好的程度增长而增长。定义一系列模糊语言,说明路况量化信息和驾驶员行为的严重性高低。RV、DV和CV的模糊子集为{VL,Ler,L,M,H,Her,VH},其中VL表示很低,Ler表示较低,L表示低,M表示中,H表示高,Her表示较高,VH表示很高,同时分为六个量化等级,量化论域为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},从基本论域到量化论域的离散化公式为:

这里a、b分别为基本论域的下限、上限,n为量化等级,x’为输入量在基本论域内的取值。
3.2 隶属函数的确定
隶属函数是应用模糊集合理论解决实际问题的基础,为了说明路况量化分值和驾驶员行为量化值属于某一模糊子集的程度,定义隶属函数并使用隶属度来度量。本文提出采用模糊统计的方法,确定输入、输出变量的隶属函数,其确定过程如下:
1)选择n1,n2,…,nm个驾驶员做抽样实验,让他们独立认真思考某一模糊语言F的含义后,提出他们认为最适宜的基本论域的界限。由于每个被测试者对这一模糊语言概念理解上的差异,因此区间不完全相同。
2)对于基本论域的一个值x',对模糊语言F的隶属频率为:

3)对于'x,对模糊语言F的隶属度为:

4)使用离散化公式4,求取x'的量化值X',转化为X'与μ(x')的对应关系,即确定隶属函数曲线中的一个点(X', μ(x'))。
5)重复步骤 2)-4),遍取基本论域的每一个值x',确定其离散值对应的隶属度,即可得到量化论域与模糊语言F的隶属度曲线。
6)重复步骤1)-5),遍取模糊集合的每一个模糊语言,确定其对应的隶属度曲线,最终确定量化论域与模糊集合的隶属函数分布。 重复使用模糊统计方法,确定RV、DV及CV的隶属函数分布如图所示。
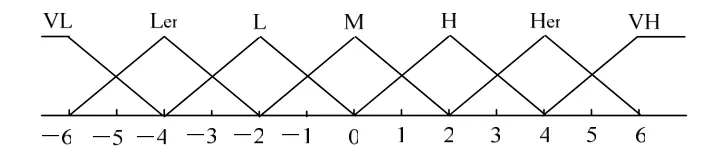
图7 RV、DV及CV隶属函数分布
3.3 模糊规则表
根据人的知识、思考及决策等,结合驾驶行为舒适度和车辆碰撞等信息,基于专家经验制定模糊规则,如表2所示,其中行代表RV的模糊子集,列代表DV的模糊子集,行与列的交叉处为CV的模糊子集。表中共有49条规则,对表中的规则解释如下:
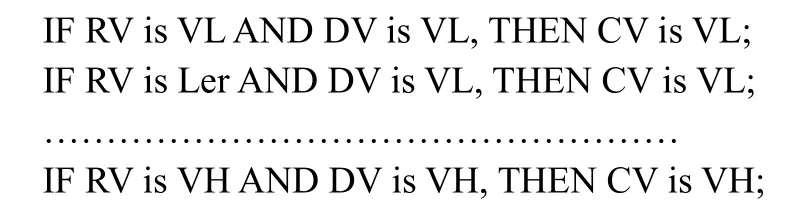
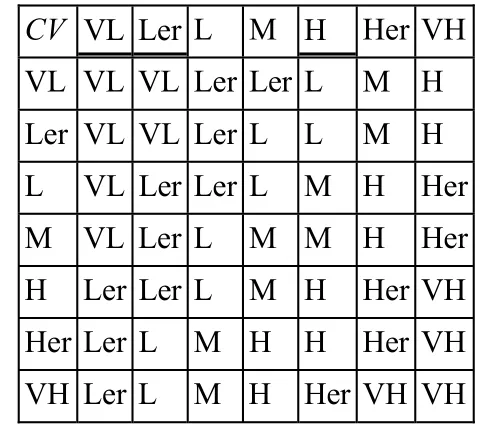
表1 模糊推理规则表
4.4 模糊推理
利用Mamdani模糊推理过程,首先根据隶属函数分布,得到模糊集合VL、Ler、L、M、H、Her和VH对应的模糊向量分别为:

然后,依次取得模糊规则表,利用公式10,模糊关系:

对于某一模糊特征向量 RV*、 DV*,利用公式推理合成规则,得到输出的精确量,此值对应隶属度最大的模糊集合为驾驶状态综合评估结果。
4 试验结果分析
4.1 高龄驾驶者机能衰减研究
我们首先分析了驾驶员机能随着驾驶时间、速度和年龄的衰减问题。实验分析结果如图4和5所示。结果显示,由于高龄驾驶者往往具有丰富的驾驶经验,所以在驾驶初始阶段他们的驾驶行为安全度往往很高。但是由于身体机能的衰退,随着行驶速度和时间的增加,他们的行为安全度呈指数衰减,结果和我们所提出的驾驶员行为安全模型相吻合。由图标可得驾驶行为安全度和持续驾驶时间、驾驶速度、驾驶员年龄的关系可由如下表达式表示:

其中, DBSD是驾驶行为安全度,t是持续驾驶时间,speed是驾驶速度,v和w是两个参数,在本次试验中,我们采用v=8,w=0.02。
由上式可以看出,随着行驶时间和速度的不同,我们对于不同年龄的驾驶员应采用不同的报警策略。因此,高龄驾驶员对于辅助驾驶系统有着特别的要求,设计适合高龄驾驶者的辅助驾驶系统是十分必要的。
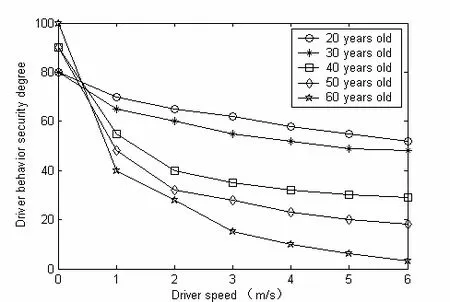
图4 各年龄段驾驶员的驾驶行为安全度与驾驶速度的关系

图5 各年龄段驾驶员的驾驶行为安全度随着驾驶时间的变化关系
4.2 驾驶环境安全性综合评估
车辆驾驶行为是一种复杂的动态行为,而辅助驾驶系统所提供的驾驶行为改进策略应该建立在综合衡量各种信息的基础之上。本文所提出的方法综合考虑了路况信息、驾驶行为和驾驶员状态等和驾驶行为密切相关的行为信息。所提出的驾驶行为改进策略是有效的。为了评价本文所提方法的有效和准确性,我们分析了动态变化下路况行为和驾驶行为的综合影响。
我们分析了路况量化值和驾驶行为信息量化值等信息相同的情况下,驾驶环境安全度量化值CV随着驾驶者年龄不同的变化情况。结果如表2。由结果我们可以看出,高龄驾驶者的安全驾驶时间有限,采用驾驶行为安全度模型后,本系统可以较好的反映高龄驾驶者的安全驾驶情况。根据分析,我们认为高龄驾驶者持续驾车时间最好不要超过 3小时。

表2 行为变化对危险等级的影响结果
5 总结
针对目前驾驶行为和辅助驾驶系统日益复杂的问题,本文提出采用信息融合的方法有效实现多源辅助驾驶信息的融合,在此基础上设计合理的驾驶行为改进策略。同时针对高龄驾驶人员所面临的问题,分析了驾驶行为舒适度和身体机能衰减规律,依此指导模糊融合策略的生成和制定相应的行为该进策略。根据车辆冲突和模型指导所建立的模糊规则集合,准确地反映了时间等因素对驾驶行为的影响。分析结果表明,路况和驾驶行为等信息,对于周围驾驶安全等级的判定情况不是简单不变的,随着驾驶时间和驾驶行为的变化,周围环境的影响对于驾驶安全的度量是动态变化的,本文所提出的方法较好的实现了这一点。
[1]Lyman S, Ferguson S A, Braver E R, Williams A F. Older driver involvement in police reported crashes and fatal crashes: trends and projections. Inj Prev 2002; 8(2):116–123.
[2]Li L, Song J, Wang F Y, Niehsen W, Zheng N N. IVS 05:New developments and research trends for intelligent vehicles. IEEE Intelligent Systems, 2005, 20(4): 10-14.
[3]Li L, Wang F Y. Research advances in vehicle lateral motion monitoring and control. International Journal of Intelligent Control and Systems, 2005, 10(1): 60-76.
[4]Kolodko J and Vlacic L. “Fusion of range and vision for real-time motion estimation,” in Proc. IEEE Intell. Veh.Symp, Jun. 2004, pp. 256–261.
[5]Christie R. The electiveness of driver training as a road safety measure: an international review of the literature. In Proceedings of Road Safety Research, Policing and Education Conference. Melbourne, Australia: Australia Transport Council, 2001.
猜你喜欢
中国交通信息化(2023年1期)2023-03-18 02:01:58
成都信息工程大学学报(2021年6期)2021-02-12 03:00:52
家庭医学(下半月)(2020年3期)2020-05-30 12:42:04
心肺血管病杂志(2019年6期)2019-07-12 09:04:30
测控技术(2018年10期)2018-11-25 09:35:52
传媒评论(2018年11期)2018-02-16 07:32:00
广东石油化工学院学报(2016年3期)2016-05-17 05:17:10
电源技术(2016年2期)2016-02-27 09:04:56
西南军医(2016年2期)2016-01-23 02:14:10
中国交通信息化(2015年3期)2015-06-05 03:53:32
