基于H LA的自行防空武器模拟训练系统设计
2010-06-27 00:58:00杨作宾左晓勇车建国李宏雷
火炮发射与控制学报 2010年1期
杨作宾,左晓勇,车建国,李宏雷
(防空兵指挥学院,河南郑州 450052)
在现代高技术条件下,自行防空武器系统造价昂贵、生产数量有限、部署时间长,在实装上开展操作训练受到严格的制约。基于半实装的模拟训练系统作为部队操作训练的辅助设备,可对操作使用人员在操作程序、异常现象处理能力等方面进行全方位的训练,有效解决装备操作训练中的“性能”、“安全”和“成本”问题。
高层体系结构H LA是为规划仿真开发、建模、设计整个过程中应遵循的规则而提出的。在基于HLA的仿真系统中,联邦成员之间的互操作和交互通过HLA的运行支撑环境(RTI)来实现[1]。通过运行支撑环境 RTI,提供通用的、相对独立的支撑服务程序,将仿真应用同底层的支撑环境分开,即将具体的仿真功能实现、仿真运行管理和底层通信传输三者分离,隐蔽了各自的实现细节,从而使各部分可以相对独立的进行开发。HLA的设计思想对自行防空武器模拟训练系统的开发具有重要启示作用。本文围绕自行防空武器模拟训练系统功能,对系统进行了方案设计,讨论了基于HLA的系统设计思想,并实现了HLA设计。
1 系统功能
针对自行防空武器模拟训练系统旨在构建一个逼真、交互性强的模拟训练仿真环境,操作手可根据操作任务并发地执行操作行为,系统具有如下功能:
1)替代实装对操作手进行训练,操作流程和操作方法步骤符合操作任务要求。
2)参训人员和装备状态、战场训练场景清晰逼真,可视性好,具有身临其境的感觉。
3)系统是一个基于H LA的分布式仿真系统,每一个操作手设计一个联邦成员,使用鼠标、键盘和操纵杆等交互工具进行交互。
4)对操作行为能够作出正确响应,主要表现为所操作部件和所影响部件的状态改变。
5)允许多操作手并发执行操作行为,保证操作行为的完整性和一致性。
6)具有误操作判别功能,但只允许误操作进行一步,即做错了必须纠正,否则不允许进行下一步操作。
7)具有可视化操作规程教学、训练成绩评定和资料查询功能。
2 系统方案设计
2.1 系统硬件设计
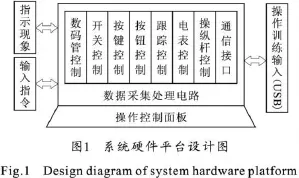
硬件平台由多个模块有机结合在一起工作,主要包括中心控制模块、数码管控制模块、拨码开关控制模块、跟踪控制模块、操纵杆控制模块、操作指令传输模块以及通信接口等。硬件平台设计方案如图1所示。
在模拟训练系统中,受训人员与虚拟装备之间的人机交互是标志操作训练水平的一个重要方面。虚拟装备的交互主要包括两类:基于标准计算机设备的交互和基于实装部件专用设备的交互。为了增强训练的真实感,人机交互的半实物仿真平台除了鼠标和键盘这样的通用设备外,还必须采用一些专用设备(如按键、旋钮),乃至特殊的实装设备(如操纵杆、手轮等)。
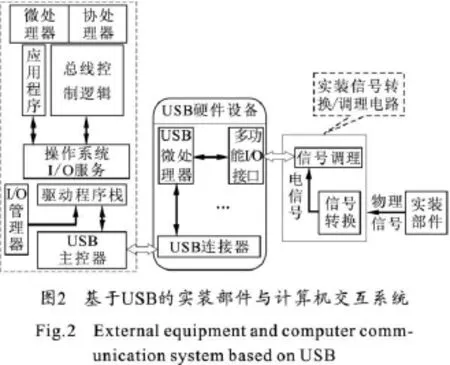
通用设备一般都是计算机的标准外设,系统对它们提供了完善的支持,包括硬件的驱动和在应用软件中的使用方法[2]。因此,采用标准外设(USB)作为交互部件,无需涉及设备级的硬件或软件工作。平台的接口设计采用USB技术,提出了一种USB接口加实装信号调理设备的交互系统设计方法。其核心思想是将用于和计算机通信的USB设备与外部实装信号采集电路分别设计,实装信号采集电路负责将实装部件产生的物理信号转换、调理为符合USB硬件系统输入规范的信号,并最终通过USB硬件设备,在USB驱动程序的支持下实现与主机的交互。USB硬件接口设计对不同的实装部件是通用的,从而实现交互系统的标准化设计,系统构成如图2所示。
2.2 系统软件设计
系统软件由W indow s XP、Mu ltiGen Creator、Vega、SQL2005、VisualC++6.0 和 pRTI等支撑软件平台和7个子系统组成,即操作训练、视景生成、人机交互、训练成绩评定、资料查询及操作规程数据库子系统,其中中央管理/监控联邦成员还包括远程发送子系统,软件设计如图3所示。

操作训练子系统采用半物理实装与虚拟装备相结合的形式,增强训练的真实感和训练效果,操作内容涵盖了指挥车和炮车的主要功能操作;视景生成子系统实现逼真的战场环境、装备模型、虚拟人模型、大气环境模型和声光电热模型,根据操作进程来实时反映虚拟实体的状态变化;人机交互子系统中,鼠标和键盘是基本输入设备,另外包括一些专用设备;训练成绩评定子系统针对操作手的操作记录,提供智能评定功能,对操作人员的操作绩效进行评价;资料查询子系统包括:设备介绍,功能描述,同时提供适人化的学习环境,根据人的学习规律设立辅助训练向导,帮助操作人员迅速掌握有关操作的知识。
3 系统H LA设计
3.1 系统背景想定[3-5]
根据空情指示信息,指挥车目标指示雷达适时开机,雷达发现目标,并向数据处理系统实时传输目标数据,经目标分配后向各炮车通播目标指示数据。各炮车根据目标数据决定单炮搜索雷达开机时机,发现目标后反馈“已发现目标”信息至指挥车。分队长根据上级命令可进行人工干预,改变目标分配结果,同时,炮车和指挥车可中断数据传输,进行通话。各炮车发现目标后,在单炮搜索雷达目标导引信息下,利用火控系统光电设备进行捕获和跟踪目标。当跟踪上目标后,炮车立即向指挥车传送“已跟踪目标信息”。此时,炮手可根据环境条件选择跟踪方式,并对目标测距,当解算出射击诸元后,炮手可伺机实施射击。
3.2 系统框架设计
本系统以H LA技术为基础,在对自行防空武器模拟训练系统的仿真剧情进行分析的基础上,设计了仿真系统的基本框架。
3.2.1 系统联邦成员设计
系统采用基于RTI的仿真联邦设计思想,其逻辑结构如图4所示。在这种结构模型下有一个中央RTI组件,用于执行全局操作,负责给本地RTI组件分配工作。联邦成员定义了与本地RTI组件之间的接口,本地RTI组件与它服务的联邦成员在一台主机上运行。

根据系统的具体功能,结合操作手设置情况,设计了1个中央管理/监控联邦成员和8个操作类联邦成员,如表1所示。
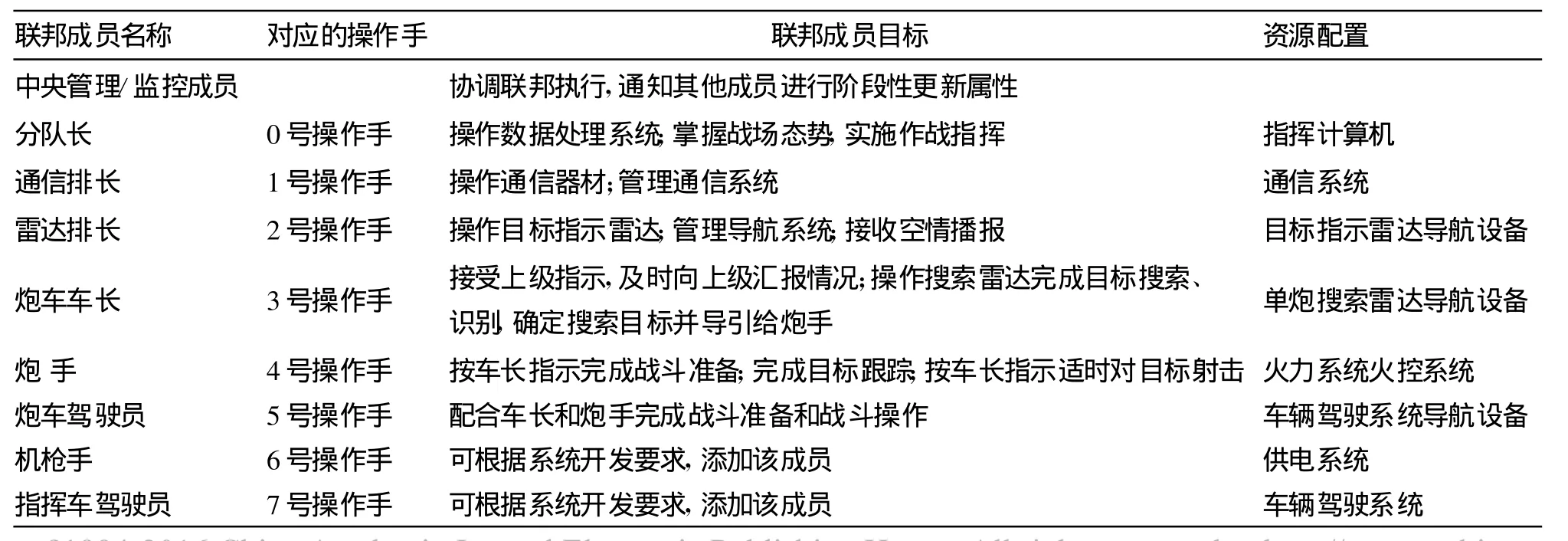
表1 联邦成员组成Tab.1 Composition of federate
3.2.2 系统框架设计
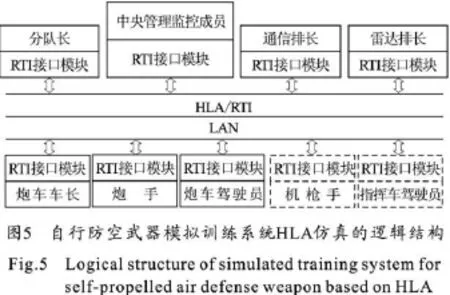
系统由通过RTI交互的一组虚拟成员接口接入的节点成员构成,其中6、7号操作手可根据系统开发要求进行添加,在系统仿真的逻辑结构图中用虚线外框描述。HLA定义的联邦系统是一个开放性的分布式仿真系统,具有可扩展性。联邦是层次概念,理论上可以作为成员加入到上层联邦,成为更复杂系统的一个联邦成员。在这种结构中,RTI从某种程度上来说是一种“软总线”,联邦成员可以在联邦运行过程中随时“插入”。系统H LA仿真的逻辑结构如图5所示。
3.3 对象模型设计
对象模型是基于HLA的仿真系统具有互操作和可重用性的重要因素之一,针对模拟训练系统的特点,采用基于操作规程和联邦成员间定向交互满足的对象模型设计方法,确定联邦成员间的定向交互关系如图6所示。

3.3.1 SOM设计
设计各联邦成员的SOM时以操作步骤信息作为对象类设计的主要内容,各对象类具有相同的数据结构[6]。联邦成员之间的交互类在此不予考虑,对象类属性的更新/反射机制已经完全能够实现信息交互。
3.3.2 FOM设计
把各联邦成员的SOM的对象类合并得到FOM的对象类,FOM的对象类结构如表2所示。
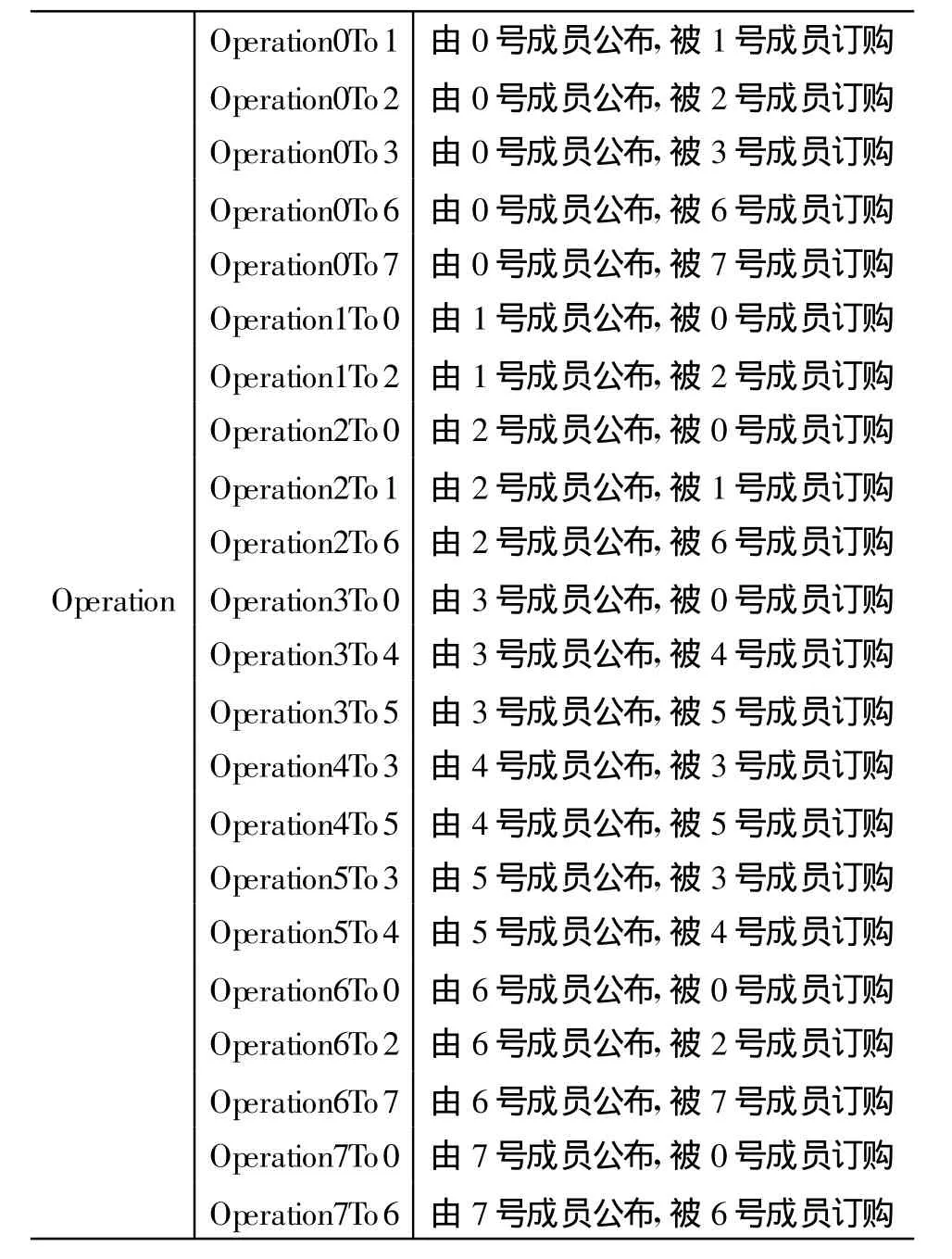
表2 对象类结构表Tab.2 Structureof objectclass
所有的对象类都是超类Operation的继承子类,在程序设计时定义各对象子类相应的C++对象,所有的C++对象采用相同的数据结构,此时只需定义抽象超类Operation对象类属性即可(见表3),其中OperationStep为联邦成员的当前操作步骤,数据类型Influence是枚举类型,其类型编码如表4所示。

表3 超类Operation对象类属性表Tab.3 Object class attributes of super class operation

表4 枚举类型定义表Tab.4 Definition of enumeration class
4 结束语
本文针对模拟训练仿真系统的特殊性,论述了基于H LA的模拟训练仿真的设计思想和开发过程,并就HLA在该系统中的应用进行了一定的探讨。实践证明H LA在改进仿真模型互操作性、可重用性以及提高仿真逼真度和沉浸性方面为复杂系统仿真提供了一条可行的途径。
[1] 周彦,戴剑伟.H LA仿真程序设计[M].北京:电子工业出版社,2002.ZHOU Yan,DA I Jian-w ei.H LA simulation p rogram design[M].Beijing:Electronic Industry Press,2002.(in Chinese)
[2] 王永山,杨宏五,杨婵娟.微型计算机原理与应用[M].西安:西安电子科技大学出版社,1999.W ANG Yong-shan,YANG Hong-wu,YANG Chanjuan.M icrocomputer theory and application[M].Xi'an:Xi'an Electronic Technology University,1999.(in Chinese)
[3] 苏斌.自行高炮操作[M].郑州:防空兵指挥学院,2007.SU Bin.Self-p ropelled antiaircraft artillery operation[M].Zhengzhou:Air Defence Forces Command College,2007.(in Chinese)
[4] 栾传俊,王立勤.连指挥车操作[M].郑州:郑州防空兵学院,2002.LUAN Chuan-jun,WANG Li-qin.Company command vehicle operation[M].Zhengzhou:A ir Defence Forces Command College,2002.(in Chinese)
[5] 巩建华,尹全亮.自行高炮光电火控系统兵器与原理[M].郑州:防空兵指挥学院,2007.GONG Jian-hua,Y IN Quan-liang.A rm and p rincip le o f op to-electronic fire control system for se lf-p ropelled antiaircraft artillery[M].Zhengzhou:Air Defence Forces Command Co llege,2007.(in Chinese)
[6] 刘耀周.基于H LA多操作手训练系统开发与研究[D].石家庄:军械工程学院,2004.LIU Yao-zhou.Research of mu ltiple operators training system based on HLA development[D].Shijiazhuang:O rdnance Engineering College,2004.(in Chinese)
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:06:44
家庭影院技术(2020年10期)2020-12-14 07:54:16
铁道通信信号(2020年3期)2020-09-21 09:13:00
家庭影院技术(2019年7期)2019-08-27 02:42:06
铁道通信信号(2018年8期)2018-11-10 05:15:44
中学科技(2018年2期)2018-03-15 22:05:13
中学科技(2016年12期)2017-01-07 08:49:31
中学科技(2016年11期)2017-01-07 02:49:29
中学科技(2016年8期)2016-09-27 17:41:48
铁路通信信号工程技术(2014年1期)2014-02-28 16:55:27