
基于DSP的PMSM矢量控制在电梯控制中的应用*
2010-06-13 11:33:04陈应豪许玉格
微处理机 2010年3期
陈应豪,罗 飞,许玉格
(华南理工大学自动化科学与工程学院,广州510640)
1 引言
三相永磁同步电机是从绕线式转子同步伺服电动机发展而来的,它克服了交流同步伺服电动机一些致命的弱点,而又同时兼有体积小、惯性低、效率高等特点。而直到20世纪70年代以后,由于计算机以及近20多年来新型的快速电力电子元件的不断出现,交流异步电机的调速才成为可能。并且在基于成熟的理论前提下,利用高速处理器DSP可以实现电动机的调速控制。同步电机相比异步电机,磁链位置与转子位置同步,在实际控制时直接检测转子的位置就可以得到磁链的位置,因此控制起来更加简单。同步电机在数控机床、医疗器械、仪器仪表、微型汽车、工业机器人等领域中都得到广泛的应用。对于电梯曳引机,要求振动小、噪声低和足够的转矩。下面就介绍永磁同步电机的矢量变化控制在电梯控制驱动系统上的应用。
2 矢量变换控制技术的引出
从电源角度出发的SPWM控制技术虽然控制线性度好并且容易实现,但是也有明显的缺点—电压利用率太低,因此人们就提出了现在最流行、效果最好的电压空间矢量PWM技术—磁链轨迹法。SVPWM技术从电动机角度出发,通过控制加在定子上的三相电压,产生旋转圆形磁场。
但是,相比起直流电机,交流电机的励磁电流和负载电流都在定子电路内,调速是比较复杂的。而基于对产生旋转磁场的等效方法的思考,德国人F.Blaschke在1971年就提出了矢量控制理论,将一个三相交流的磁场系统通过两相交流系统作为过渡,变换成为一个旋转体上的直流磁场系统。将用于控制交流调速的给定信号变换成类似于直流电机磁场系统的控制信号,控制时,可以和直流电动机一样,使其中一个磁场电流不变,而控制另一个磁场电流信号,从而获得和直流电动机类似的控制效果。
矢量变换控制的根本思路,就是以产生同样的旋转磁场为准则,建立交、直流电动机的等效关系,把交流电动机模拟成直流电动机来控制。经过Clarke变换和Park变换之后,就可以把交流电动机模拟成直流电动机来控制了。
由于篇幅有限,关于Clarke变换和Park变换的内容在此不作介绍,有兴趣的读者可以参考文献5。
3 SVPWM基本原理
用三相平衡正弦电压向交流电动机供电时,电动机的定子磁链空间矢量复制恒定,并以恒速旋转磁链矢量的运动轨迹形成圆形的空间旋转磁场。电压空间矢量按绕组的实际空间位置来定义,三相定子位置上相差120°,而在其所施加的三相平衡电压在相位上也是相差120°。三相电压空间矢量相加所形成的一个合成电压空间矢量U是一个旋转的空间矢量,它的旋转频率正好是电源频率ω。而经过推导电压矢量与磁链矢量的关系得出,磁链矢量在空间旋转一周时,电压矢量也连续地沿磁链圆的切线方向运动一周,并且运动轨迹和磁链圆重合。这样,电机旋转磁场的问题就可以转化为对电压空间矢量的运动轨迹形状的研究了。
控制电压空间矢量的运动轨迹,是基于逆变器(本应用采用IPM模块)的几种开关状态所产生的基本电压空间矢量的时间线性组合。
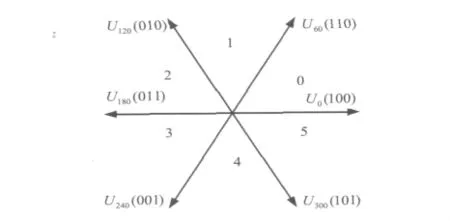
图1 基本电压空间矢量及扇区
其中的U旋转角速度即为输出正弦电压的角频率,可以由Ux和Ux+60线性时间组合来合成,它等于t1/TPWM倍的 Ux和 t2/TPWM倍的 Ux±60的矢量和。其中t1和t2分别是Ux和Ux+60的作用时间,TPWM是U作用的时间。这样,当TPWM取足够小的时候,电压空间矢量的轨迹就近似是一个圆形了。其中,TPWM可以自己选定,U也可以根据电机特性曲线确定,根据图2所示,有

而事实上,还有两个零基本矢量没有标出,U000和U111,一般在TPWM时间内分散地插入零矢量,以提高电动机性能。其总时间为t0,并且满足:TPWM=t0+t1+t2,另外,要进行矢量线性合成前需知道应该用哪两个基本矢量进行合成,所以,必须知道磁链所在的区域。而图中已经将两两相邻基本矢量之间的空间划分为6个扇区。

图2 电压空间矢量的线性组合
以上所述的SVPWM原理,可以用软件实现,而更加方便的办法,是利用具有SVPWM硬件功能的DSP直接硬件产生。TI公司的TMS320F2812是电机专用的高端DSP,正确的对硬件设置可以产生所需要的SVPWM波,从而简化和优化了控制程序。图3为第5扇区在一个TPWM周期内(逆时针)硬件实现的五段式SVPWM波形。
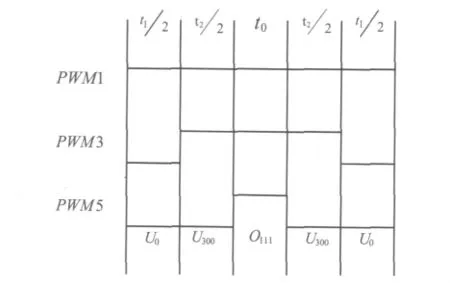
图3 第5扇区SVPWM波形(逆时针)
4 电梯驱动DSP控制系统
图4中IPM模块采用三菱公司的PM50CLA060(6单元),VDC是整流后的直流电压。另外,除了驱动模块、电流传感器、PMSM,编码器外,图中其他功能算法均可以由DSP实现。
三相绕组的U相和V相通过电流传感器测量逆变器输出的定子电流iU、iV,经过DSP的A/D转换器转化成数字量,并利用式iW=-(iU+iV)计算出iW。通过Clarke变换和Park变化将电流iU,iV,iW变化成旋转坐标系中的直流分量iq、id,iq、id作为电流环的反馈量。
利用旋转编码器测量电动机的角速度ω,接着通过积分计算变换为电角θ。其中,电角θ用于参与park变换的计算,而ω用作速度的负反馈,亦即途中的给定电梯速度负反馈量。
给定的电梯运行速度与负反馈量ω运算后经过PI调节器,输出得到旋转坐标中用于转矩控制的电流q轴分量,连同旋转坐标中另一分量,(等于零)与电流反馈量iq,id运算后经过PI调节器,分别输出旋转坐标系 Odq的电压分量Uq,Ud。Uq,Ud,通过Park逆变换后得到Oαβ两相坐标中的电压分量 Uα,Uβ。这时 Uα,Uβ,已知,并且计算得到 Uα,Uβ所在的扇区,就可以实现SVPWM波形,经过驱动模块来控制IPM模块,从而控制PMSM。IPM模块是一个集成的智能模块,整个电梯控制系统中,主要包括电梯信号处理的逻辑控制和电机驱动两大模块。而在程序设计上,两大功能模块均作为定时器中断服务程序,在主程序的死循环中等待每次定时器下溢执行。图5中给出电机驱动部分定时器中断服务程序流程图。
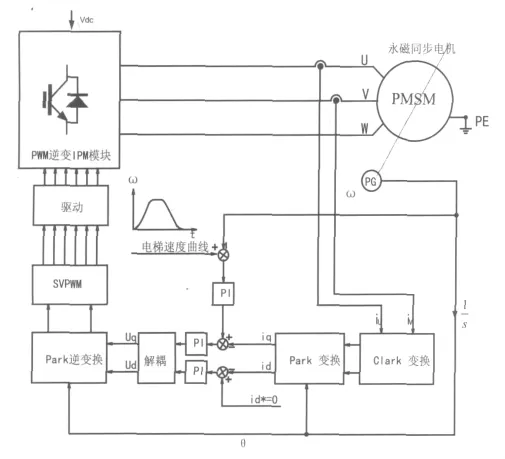
图4 电梯控制系统驱动部分原理图
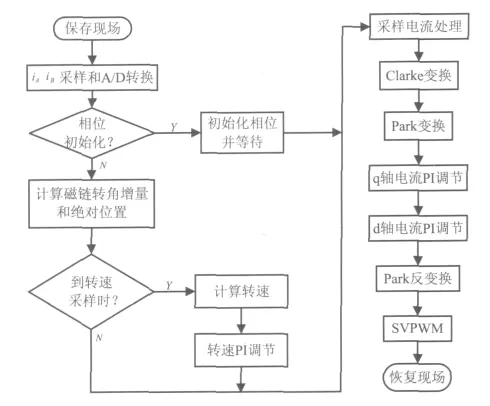
图5 定时器中断服务程序流程图
流程图中的转子相位初始化可以通过给定子一个id=0,iq=in(额定电流),θ= -90°的直流电来实现。
5 结束语
TMS320F2812高端DSP,由于本身已经带有电机控制模块,只需通过硬件设置便可以产生SVPWM波,实现矢量控制相对简单。PMSM的矢量控制在电梯驱动的应用上已经获得良好的效果,不但振动小、噪声低,而且能达到精确的控制要求。随着矢量控制技术的逐渐成熟和普及,PMSM矢量控制在其他应用领域的前景也十分看好。
[1]谢宝昌,任永德.电机的DSP控制技术及其应用[M].北京:北京航空航天大学出版社,2005.
[2]王晓明,王玲.电动机的DSP控制—TI公司DSP应用[M].北京:北京航空航天大学出版社,2004.
[3]马小亮.大功率交 -交变频调速及矢量控制技术[M].北京:机械工业出版社,2004.
[4]杨耕,罗应立.电机与运动控制系统[M].北京:清华大学出版社,2006.
[5]Freescale Semiconductor.3 - Phase PM Synchronous MotorVectorControlUsing a56F80x,56F8100,or 56F8300 Device[Z].Freescale Semiconductor,2005.
猜你喜欢
南北桥(2022年2期)2022-05-31 04:28:07
中学生数理化·高一版(2021年11期)2021-09-05 12:21:24
电脑知识与技术·经验技巧(2017年9期)2018-02-24 19:55:20
西南交通大学学报(2016年4期)2016-06-15 20:29:36
现代防御技术(2016年1期)2016-06-01 12:13:28
电测与仪表(2016年10期)2016-04-12 00:26:38
新高考·高一物理(2016年1期)2016-03-05 22:47:39
计算机技术与发展(2016年10期)2016-02-27 00:44:08
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
