
一种自平衡两轮移动机器人的设计实现
2010-06-13 02:10胡天链
科技传播 2010年14期
张 琦,胡天链
西南科技大学信息工程学院,四川绵阳 621010
一种自平衡两轮移动机器人的设计实现
张 琦,胡天链
西南科技大学信息工程学院,四川绵阳 621010
本文基于仿人智能控制研究了有关自平衡两轮移动机器人运动控制问题,通过分析自平衡两轮移动机器人的运动特性,设计了基于动觉智能图式仿人智能控制的控制器,并在嵌入式RT-Linux操作系统下实现了机器人软件设计。本文还应用Matlab/Simu2link仿真软件进行了机器人的仿真实验,并得到了较好的实验结果。
两轮移动机器人;仿人智能控制;动觉智能图式;ARM9;RT-Linux
0 引言
自平衡两轮机器是一个典型的非线性、强耦合、多变量、时变和自然不稳定系统,是近年来研究倒立摆与机器人控制问题的又一研究平台,是检验各种控制理论的理想模型。仿人智能控制理论从分层递阶智能控制系统的最低层(运行控制级)着手,充分应用已有的控制理论成果和计算机仿真结果,直接对人的控制经验、技巧和各种直觉推理逻辑,即人体的动觉智能进行测辨、概括和总结,并将其编制成各种简单实用、精度高、能实时运行的控制算法(动觉智能图式),直接应用于实际控制系统。本文依据动觉智能图式的仿人智能控制理论实现两轮移动机器人的运动控制,对自平衡小车机器人提出了控制思想。
1 系统结构
以自平衡两轮机器人行走方向为X轴,车轮轴线为Y轴,铅垂线为Z轴,设整机质心为P点,系统模型可简化为如图1所示。
可以看出,该系统具有3个自由度:绕y轴的转动,转角θP和角速度ωP;沿x轴的直线运动,位移xrm和移动速度vrm;绕z轴的转动,转角βz和角速度ωP,在下文中即以该6个变量为状态变量。系统的平衡靠电动机施加在左右轮轴上的驱动力矩TL和TR控制,系统的输入变量为TL和TR,输出变量为xrm,vrm,ωP和βz,属于典型的多输入多输出系统。

图1 自平衡两轮机器人系统模型
2 基于仿人智能控制的控制器设计
传统的控制方法必须基于被控对象的精确模型,而仿人智能控制的主导思想是对人的控制结构进行宏观模拟,然后在此基础上进一步研究人的控制行为并加以模拟,它的主要研究目标不是被控对象,而是控制器本身如何对控制专家行为进行模拟。
为实现机器人良好的平衡稳定性控制和对参考速度的跟踪,需要对vrm,θP分别设计一个仿人智能控制器,内含运行控制级及参数校正级,对两个控制器的输出设计了权重协调控制器,根据机器人小车的运动学模型可求出其左右轮速作为控制输出。
2.1 运行控制级的设计


图2 运行控制及的特征模型
1)当偏差很大时对应图2中区域①采用Bang - Bang控制,尽快地减小误差;
2)在偏差及偏差变化率均很小(已满足要求)时,对应图2中区域⑥,采用保持模态控制;
3)在偏差减小过程中,若偏差变化速度低于或等于预定的速度时,对应图2中区域②,采用比例模态控制;
4)在偏差减小过程中,若偏差变化速度大于预定的速度时,对应图2中区域③及区域⑤,在比例模态的基础上引入微分模态,形成比例加微分的控制模式;
5)在偏差减小过程中引入微分模态仍不能使偏差变化速度减小到预定的速度范围时,对应图2中区域④,引入正反馈抑制偏差变化速度;
6)在偏差增大过程中,对应图2中区域⑦,为了抑制偏差的增大,使偏差尽快回头,采用比例模态加微分模态的控制模式。

图3 硬件框图

2.2 控制器实现
自平衡两轮移动机器人控制系统由直流伺服电机、光电编码器、陀螺仪、倾角传感器、蓝牙模块、S3C2440主控芯片等构成。陀螺仪、倾角传感器感知机器人姿态,主控器依据仿人智能控制算法实现机器人姿态控制由蓝牙接收PC机指令,实现机器人遥控操作。硬件结构如图3所示。
机器人软件设计在嵌入式RT-Linux操作系统下实现。该OS具有开放源代码、体积小、执行速度快、较好的可裁减性与移植性等特点。开发过程为,首先在PC机通过交叉编译器GCC编译用户程序,生成能在目标板上执行的二进制文件,然后通过串口或NFS方式将用户程序下载到目标板上,利用PC机对目标程序进行仿真调试。
3 实验研究
为了对样车试验情况进行进一步深入的分析,我们对试验过程中的相关数据进行了即时采集,通过蓝牙适配器传送到PC计算机进行分析处理。
取车体平台最初倾角θP约6°(0.1弧度),初速度为0,在平衡状态下(没有设定)采集到的有关数据,经处理后生成的实验曲线如图4所示。
为使摆杆回到平衡位置,摆杆开始角速度较大,然后迅速收敛到0,摆杆角速度和角度调整时间分别为:1.3s和1.2s。通过对样车的实际行走实验表明,该系统可以被稳定地控制在零点位置,并且具有较强的抗干扰鲁棒性,即在控制过程中对车体平台施加扰动使摆角产生变化,当所施加的扰动使摆角产生的偏差在一定范围内时,系统均能够快速的恢复到平衡的零点位置。
给系统一个阶跃信号,图5是倒立摆移动速度响应曲线,其调整时间为1.3s。而移动速度的跟踪与平衡控制是相互耦合的,移动速度跟踪可看成是对平衡控制的扰动,使得倒立摆的移动速度趋于给定值,移动速度跟踪相对要慢一点。
实验数据表明:系统跟踪速度快,控制简单,实现了预期的控制目标。

图4 角速度与倾角曲线图
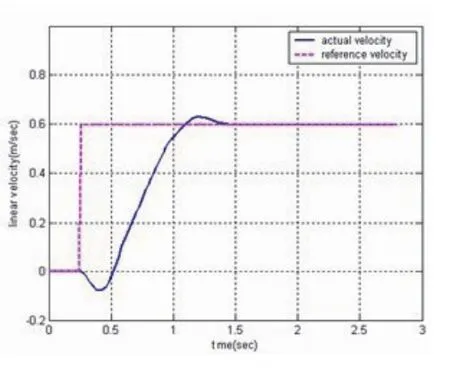
图5 移动速度曲线图
4 结论
本文分析了自平衡两轮移动机器人的物理运动特性,设计了基于动觉智能图式仿人智能控制的控制器。应用Matlab/ Simu2link仿真软件进行了机器人的仿真实验,实现了自平衡两轮移动机器人系统的倒立稳定控制,并得到了较好的实验结果。实验证明,仿人智能控制方法模拟人控制器的动觉智能为解决复杂运动控制提供了一个有效途径。
[1]杨兴明,丁学明,张培仁,赵鹏.两轮移动式倒立摆的运 动控制[J].合肥工业大学学报:自然科学版,2005,28(11): 1485-1488.
[2]李航,孙厚芳,韩建海,李济顺,赵书尚,林青松.两 轮机器人行走机构的建模与实验[J].北京理工大学学报,2004, 24(12):1058-1061.
[3]丁学明,张培仁,杨兴明,徐勇明.基于单一输入法的两轮移动式倒立摆运动控制[J].系统仿真学报,2004,16(11): 2618-2621.
[4]雷李,李祖枢,王牛.基于仿人智能控制的足球机器人底 层运动研究[J].哈尔滨工业大学学报,2004,36(7):978-980.
[5]盛朝强,谢昭莉.基于仿人智能控制的汽车动力转向系统 [J].重庆大学学报:自然科学版,2004,27(11):44-50.
TP242
A
1674-6708(2010)23-0246-02
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
教学研究与管理(2022年3期)2022-04-25
传感器与微系统(2018年7期)2018-08-29
制造技术与机床(2017年3期)2017-06-23
现代制造技术与装备(2016年12期)2016-04-06
智能系统学报(2015年4期)2015-12-27
当代体育科技(2015年4期)2015-12-05
现代养生·上半月(2015年9期)2015-10-08
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
中国海洋大学学报(自然科学版)(2014年7期)2014-02-28
